

3 раздел Скалярное управление
.pdfI1 U1 |
C(s ) |
, |
|
B( f1,отн , s ) |
|||
|
|
где
C(s ) a2 |
(1 |
2 |
)S 2 |
, |
a= |
R2' |
. |
|
|
|
|||||||
|
|
a |
|
|
x |
|
||
|
|
|
|
|
|
(3.20) |
||
|
|
|
|
|
|
|
|
|
Приведенный ток ротора [6]
I ' |
U |
|
s |
|
. |
|
|
|
|||
2 |
1 |
|
B( f1,отн,s ) |
|
|
|
|
|
(3.21) |
||
Известно, что электромагнитный момент АД определяется
соотношениями
M |
m1(I2' )2 R2' |
m c ФI ' |
cos , |
(3.22) |
||||||||||
|
|
|
||||||||||||
|
|
|
1,номs |
1 1 |
2 |
|
|
2 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где m1 – число фаз обмотки статора; |
2 − угол сдвига фазы между ЭДС и |
|||||||||||||
током ротора; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R' |
|
|
|
|
|
R' |
|
|
|
|
cos 2 |
|
2 |
|
|
|
|
2 |
|
|
. |
(3.23) |
|||
|
|
|
|
|
|
|
|
|
|
|||||
|
(R2' )2 (x2' )2 S |
|
AS |
|||||||||||
|
|
|
|
|
|
|
|
|
||||||
Подставляя в первые части соотношений (3.22) формулы (3.21) и (3.23),
получаем:
|
m U 2 |
|
R' |
S |
|
|
|
|
|
|
|
|
|||||
M |
1 1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1,ном |
B( f1,отн,s ) |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
R' |
S |
|
|
|
|
|||
m1c1ФU1 |
|
|
|
|
|
2 |
|
|
|
. |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
AS B( f1,отн,s |
) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Из (3.24) с учетом (3.19) окончательно находим
M |
m1c12Ф2 f1,отн |
|
R2' S |
. |
|
|
||
|
|
1,ном |
|
|
A(S ) |
|
|
|
R1 |
x |
f |
x |
f |
||||
1 1,отн |
2 |
1,отн |
||||||
|
|
I1 |
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
2 |
U1 |
|
x f1,отн |
I |
|
||||
(3.24)
(3.25)
R f
2 1,отн
Sa
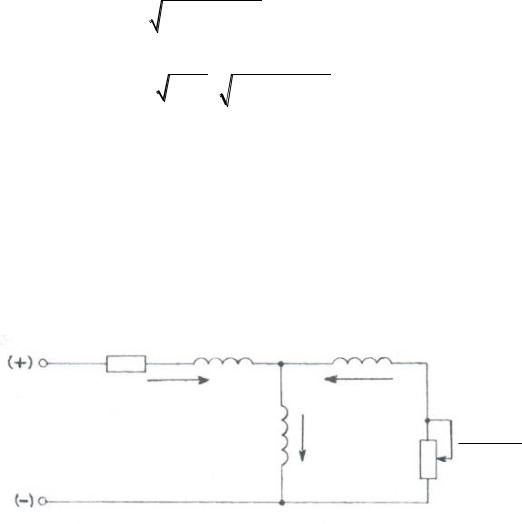
Рисунок 3.17 − Схема замещения фазы асинхронного двигателя при частотном управлении
|
|
|
|
|
|
u f |
U1, f1 |
|
|
|
|
|
|
|
|
|
|
|
1 u |
|
4 |
|
|
ПЧ |
|
АД |
u |
1 |
|
2 |
u |
|
|
||
|
|
|
ФП |
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
БО |
|
|
|
ТГ |
|
|
|
|
|
|
|
isc |
|
|
A5 |
|
|
|
|
A1 |
isa |
|
s |
uРС |
|
|
I1а |
|
|||
|
|
|
|
|||||
5 |
|
|
|
|
|
|
|
ФТ |
|
|
|
|
uотс |
A3 |
A4 I1 |
|
|
uо.с |
|
|
|
|
|
|
|
|
3 I1max
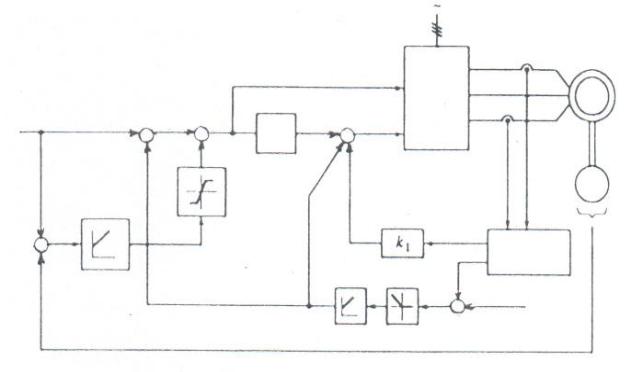
Рисунок 3.18 − Функциональная схема системы ПЧ-АД с обратной связью по току и скорости
3.5.3.3 Система ПЧ-АД с обратными связями по току и скорости
Увеличение диапазона регулирования по скорости АД можно
получить за счет введения в рассмотренную систему управления (см. рис.
3.16) отрицательной обратной связи по скорости. Функциональная схема подобной системы при питании от ПЧ как источника напряжения приведена на рис 3.18. Здесь канал отрицательной обратной связи по скорости включает в себя тахогенератор ТГ как датчик обратной связи, узел ∑5 суммирования напряжений управления скоростью АД U y и обратной отрицательной связи
по скорости Uо.с , регулятор абсолютного скольжения А5, блок БО ограничения его выходного напряжения UРС , а также узел ∑4 суммирования напряжения и UРС результирующего напряжения U у1 с выхода сумматора
∑1.
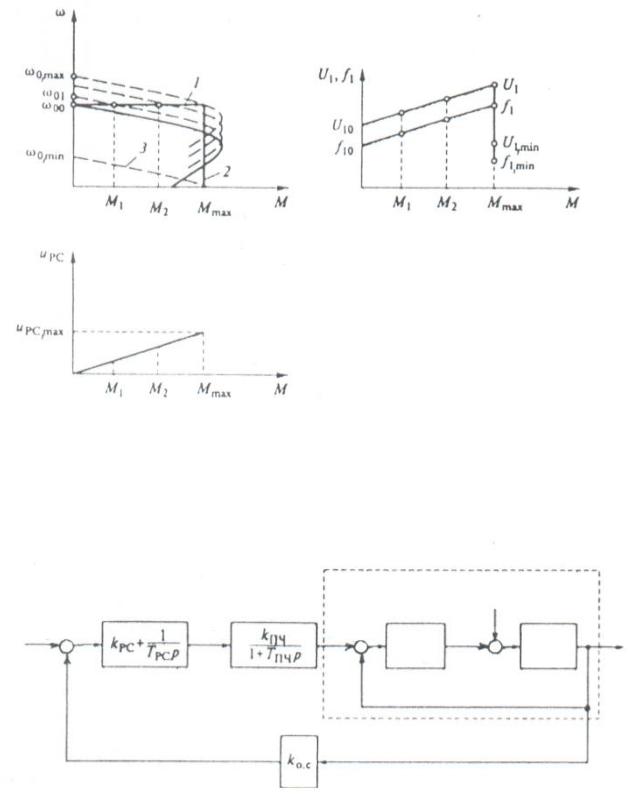
По мере увеличения нагрузки на валу АД (от момента М1 до момента
М2 на рис. 3.19) за счет уменьшения скорости АД и, следовательно сигнала увеличивается сигнал рассогласования 3 Uy Uо.с. 00 S
пропорциональный абсолютному скольжению двигателя. Здесь 00 −
заданная скорость идеального холостого хода АД соответствующая исходному сигналу управления U y . − реальная скорость АД при заданной
нагрузке на его валу. При s 0 сигнал UРС на выходе регулятора скольжения, суммируясь с сигналом Uy1 Uy (при I1 I1,max ), за счет
интегральной составляющей передаточной функции регулятора А5
обеспечивает такое приращение сигнала управления U f преобразователем частоты, при котором частота выходного напряжения ПЧ становится равной f10 (1 S ) . Одновременно с изменением частоты за счет функционального
преобразователя ФП меняется по сравнению с начальным напряжением U10
и выходное напряжение преобразователя U1 (см. рис. 3.19, б). При этом скорость двигателя восстанавливается до заданного значения 00 , т.е.
обеспечивается абсолютная жесткость |
механической |
характеристики АД |
|
(линия 1 на рис. 3.19, а). |
|
|
|
При |
превышении максимально |
допустимого |
тока статора АД ( |
I1 I1,max |
и, соответственно, M Mmax ), регулятор скольжения должен |
||
быть исключен из работы, например, путем ограничения его выходного
сигнала UРС на уровне (см. рис. 3.19, в). При этом вступает в
работу отрицательные обратные связи по току статора с регулятором А3,
обеспечивая за счет одновременного уменьшения частоты и напряжения
статора АД |
до их минимальных значений f1,min |
и U1,min ограничение |
момента АД |
при 0 на уровне Mmax (линия |
2 на рис. 3.19, а). |
Минимальная асинхронная скорость двигателя w0,min |
будет соответствовать |
|
значениям f1,min и U1,min , а механическая характеристика – линии 3 (см.
рис. 3.19, а).
Устойчивость и динамические показателя качества регулирования скорости АД определяются выбором параметров пропорциональной и интегральной составляющих передаточных функций регуляторов А5 и А3.
На рис. 3.20 представлена структурная схема линеаризованной системы, функциональная схема которой приведена на рис. 3.18 при работе АД на участке механической характеристики в пределах значений абсолютного скольжения sa sк . На схеме приняты следующие обозначения
[13]:
β – модуль жесткости линеаризованной механической характеристики АД ( 2Мк /( 0,ном sк ) );
Тэ – эквивалентная электромагнитная постоянная времени цепей статора и ротора АД, определяемая по формуле Тэ 1/ ( 0,эл,ном sк ) , где
0,эл,ном |
− угловая скорость электромагнитного поля АД при его |
|||||||
номинальной |
|
частоте |
питания |
f1,ном 50 Гц |
( |
|||
|
2 f |
|
|
314 с 1). Для АД общепромышленного исполнения |
||||
0,эл,ном |
1,ном |
|
|
|
|
|
||
sk 0.005..0.5 |
(меньшие значения характерны для мощных двигателей), |
|||||||
Тэ (0,006..0,06) с; |
|
|
|
|
|
|
||
kПЧ |
– |
|
передаточный |
коэффициент |
ПЧ |
( |
||
kПЧ 0 / UРС 2 f1 /( pп UРС ) ). При работе АД |
в зоне |
частот |
||||||
f1 f1,ном 50 Гц и номинальном сигнале управления преобразователем
Uy,ПЧ,ном |
соотношение |
f1 /UРС f1,ном /Uy,ПЧ,ном |
(обычно |
Uy,ПЧ,ном = 5 В ). |
|
|
|
ТПЧ – постоянная времени цепи управления ПЧ, которая при высоких частотах модуляции выходного напряжения промышленных ПЧ (2..50 кГц)
не превышает 0,001 с.
Передаточная функция ПИ-регулятора скорости:
WРС (S) |
UРС (S) |
kРС |
1 |
. |
|
Uy(S) |
ТРСS |
||||
|
|
|
Передаточная функция цепи обратной связи по скорости двигателя
|
W |
(S) |
Uо.с(S) |
k |
. |
|
|
||||
|
о.с |
|
(S) |
о.с |
|
|
|
|
|
|
|
При |
номинальном сигнале |
управления электроприводом равном |
|||
Uз,с,ном |
и соответствующей |
ему номинальной скорости АД |
|||
ko,с Uз.с.ном / ном (Uз.с.ном 10В ).
а) |
б) |
|
в)
Рисунок 3.19 − Механические характеристики (а), зависимости выходных напряжения и частоты ПЧ (б), а также напряжения регулятора скорости (в) от момента в системе ПЧ-АД с обратной связью по скорости
АД
РС |
|
ПЧ |
|
|
Mc |
|
|
|
|
|
|
|
|
||
uз.с u |
uРС |
0 |
|
M |
1 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Tм p |
|
|
|
|
1 Tэ p |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
uо.с |
|
|
|
|
|
|
|
Рисунок 3.20 − Структурная схема системы ПЧ-АД с обратной связью по скорости

В соответствии со структурной схемой АД его результирующая передаточная функция по отношению к 0 :
W (S) |
(S) |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||
АД |
0 |
(S) |
|
|
T T s2 |
T |
s 1 |
|
|
|
|
||||||
|
|
|
|
|
э M |
M |
|
|
При ТМ 4Тэ : |
|
|
|
|
|
|
|
|
WАД (S) |
|
|
1 |
|
, |
|
||
|
|
|
|
|
|
|||
(T01s |
|
|
|
|
||||
|
|
1)(T02s 1) |
|
|||||
где
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1 |
|
1 |
|
1 |
|
4Т |
э |
|
1 |
|
1 |
1 |
|
4Т |
э |
|
|||||||||||
|
|
|
|
1 |
|
|
|
; |
|
|
|
|
1 |
|
|
|
. |
||||||||||
|
T |
2Т |
|
Т |
|
|
|
T |
2Т |
|
Т |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
|
|
|||||||
01 |
|
|
э |
|
|
|
|
М |
02 |
|
|
э |
|
|
|
|
|
|
|||||||||
Если отнести постоянные |
T02 |
и ТПЧ |
к малым некомпенсируемым |
||||||||||||||||||||||||
постоянным и в качестве оценки их влияния принять Т Т02 ТПЧ , то при настройке электропривода на модульный оптимум постоянная интегрирования и коэффициент передачи пропорциональной части регулятора РС определятся так:
Т |
РС |
k k |
Т |
; |
k |
РС |
=Т /Т |
РС. |
|
о.с. ПЧ |
|
|
|
01 |
В рассмотренной системе частотного управления (см. рис. 3.18)
стабилизация скорости двигателя при увеличении нагрузки обеспечивается за счет повышения частоты f1. В такой системе при
изменении момента нагрузки Мс от нуля до Мном точность стабилизации скорости (статизм по скорости) составляет 6%, т.е. с / 0 0,06.
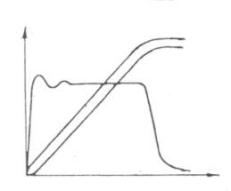
Примерные графики переходных процессов в системе ПЧ-АД с обратной связью по току и скорости приведены на рис. 3.21. Видно, что отрицательная обратная связь по скорости, обеспечивая совместно с сумматором ∑4 (см. рис. 3.18) М const , формирует линейное нарастание частоты и пуск двигателя с постоянным ускорением.
М , , f1,отн f1,отн
M
t
0
Рисунок 3.21 − Графики переходных процессов момента и скорости при пуске двигателя в системе ПЧ-АД с обратными связями по току и скорости
Использование отрицательной обратной связи по скорости (совместно с сумматором ∑4) для стабилизации момента двигателя в переходном процессе (см. рис. 3.19 а) не позволяет точно стабилизировать момент,
изменяющийся при различных изменениях параметров АД и преобразователя ПЧ, из-за отсутствия его прямого контроля. Для контроля момента в системах ПЧ-АД используют положительную и отрицательную обратные связи по току статора (см. рис. 3.18), обеспечивающие стабилизацию тока I1
и изменения частоты f f1 f за счет изменения U1 и f1. При этом с учетом (3.16) стабилизируется абсолютное скольжение sa ( 1 ) / 1,ном ,
что согласно (3.25) приводит к стабилизации момента.
Отметим, что формирование требуемых переходных процессов в системах ПЧ-АД вместо формирующих обратных связей (по скорости и току
статора) может осуществляться с помощью задатчика интенсивности SJ,
который формирует требуемый закон изменения U y и, соответственно,
частоты f1 и скорости АД.
3.6 Системы частотно-токового управления
3.6.1 Необходимые понятия
При частотно-токовом управлении АД питается от преобразователя частоты (ПЧТ), работающего в режиме источника тока. Подобный преобразователь может быть реализован на основе автономного инвертора тока АИТ, обобщенная схема подключения которого показана на рис. 3.22. В
состав АИТ (рис. 3.23, а) входят: управляемый выпрямитель УВ,
обеспечивающий за счет отрицательной обратной связи по току нагрузки
(датчик тока ДТ и регулятор тока РТ) совместно с фильтрующим дросселем Др режим управляемого источника постоянного тока, и инвертор тока ИТ,
выполняющий функцию формирования требуемой частоты выходного тока.
Реализация ПЧТ возможна и на основе преобразователей частоты с непосредственной связью НПЧ (рис. 3.23, б), в которых для каждой из вентильных групп имеется внутренний контур регулирования тока, а частота выходного тока НПЧ задается генератором частоты ГЧ.
Контур регулирования тока ПЧТ, как правило, астатический, и
параметры его ПИ-регулятора определяют так же, как и для ПИ-регулятора тока в электроприводах постоянного тока.
Отличительной особенностью ПЧТ является возможность двустороннего обмена энергией между питающей его сетью и двигателем с нереверсивным УВ за счет изменения направления противо-ЭДС инвертора и сохранения направления в нем выпрямленного тока.