Бройтман_Э.З._Железнодорожные_станции_и_узлы
.pdfной секции в исходное положение. При заторможенном положении пружинный механизм обеспечивает необходимое расстояние между тормозными шинами и головками рельса.
Пневматический цилиндр представляет собой исполнительный механизм, который преобразует энергию сжатого воздуха в поступательное движение и через систему рычагов приводной секции в тормозные усилия шин замедлителя.
При въезде вагона на замедлитель оператор включает требуемую ступень торможения в зависимости от веса вагона, скорости его движения и наличия подвижного состава на сортировочном пути, на который следует отцеп. Сигнал от пульта управления поступает на реле давления управляющей аппаратуры ВУПЗ-72. Реле, в свою очередь, подает воздух из пневмосети в пневмоцилиндры под давлением, соответствующим выбранной ступени. Соответствующее ступени торможения усилие от пневмоцилиндров через рычажные системы приводных секций передается тормозным балкам как снаружи, так и внутри колеи, что приводит к одновременному соприкосновению тормозных шин с колесом вагона.
При снятии давления воздуха тормозная система возвращается в исход - ное положение под действием собственного веса и пружинного механизма.
Подача сжатого воздуха к пневмоцилиндрам замедлителя осуществляется от двух воздухосборников с управляющей аппаратурой ВУПЗ-72, включенных в горочную или станционную пневмосеть.
Пневмогидравлический замедлитель ВЗПГ-ВНИИЖТ (рис. 5.17) можно ус-
танавливать на тормозных позициях спускной части горки. В зависимости от требуемой тормозной мощности выпускают трех- и пятизвенные замедлители. В этих замедлителях одним механизмом обеспечиваются три положения: опущенное, подготовленное к торможению и заторможенное. Тормозные балки перемещаются из одного положения в другое с помощью пневмогидравлического привода (ПГП) и силовых гидроцилиндров, рабочие полости которых через гибкие рукава высокого давления и подводящие трубопроводы связаны с цилиндрами низкого и высокого давления ПГП.
В замедлителе предусмотрены четыре ступени торможения, устанавливаемые оператором или системой ав-
томатического регулирования скорости в зависимости от массы вагона, скорости его движения и других факторов. Кинематическая схема замедлителя ВЗПГ проще схем других применяемых замедлителей. Нормально за - медлитель находится в отторможенном состоянии (ОП), допускающем пропуск локомотива.
Для перевода балок 1 и 2 в подготовленное к торможению положение (ПП) через трубопровод 4 открывается проход жидкости к гидроцилиндру замед-
251
5.10. Автоматизация и механизация процессов н а сорт и ровочн ых ст ан ц и ях
5.10.1. Существующие системы
На сети железных дорог России в настоящее время имеется 108 сортировочных горок, из них 74 оборудованы системами горочной автоматической централизации (ГАЦ), в том числе с контролем расцепа, 14 оборудованы системами автоматического регулирования скорости скатывания отцепов (АРС). Большинство тормозных позиций оборудованы замедлителями KB, T50, РН312.
В настоящее время практически все станции, имеющие горки, оборудованы системами АСУ СС.
Внедряются системы телевизионного считывания инвентарных номеров вагонов на входе и выходе станции.
Горочная автоматическая централизация (ГАЦ) обеспечивает перевод стрелок по маршруту следования отцепов. ГАЦ может работать в ручном, программном и маршрутном режимах. При работе в программном режиме информация о маршрутах следования отцепов поступает из накопителей горочного программно-задающего устройства (ГПЗУ).
При маршрутном режиме работы маршрут движения для каждого отцепа устанавливает оператор нажатием кнопки, соответствующей номеру пути сортировочного парка.
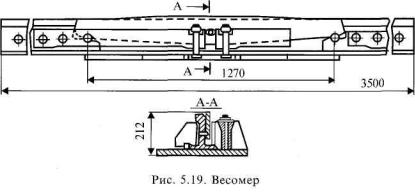
Системы АРС обеспечивают автоматическое регулирование скорости роспуска вагонов с горки. Для этого на пути следования вагонов устанавливают весомеры (рис. 5.19), которые позволяют определить вес вагона, данные поступают в вычислительное устройство, и оно определяет вес всего отцепа. Скоростемеры определяют фактическую скорость движения вагона по спускной части горки. Данные о скорости и весе отцепа поступают в вычислительные устройства, которые определяют режим торможения отцепа.
Контроль заполнения подгорочных путей вагонами (КЗП) осуществляется бесстыковыми рельсовыми цепями по 25 м.
255
Для торможения вагонов на спускной части горки применяются замедлители:
-клещевидные нажимные замедлители (тип T50) работают по принципу клещей, которые образуются из двух рычагов, насаженных на общую ось;
-клещевидно-весовой замедлитель (тип KB) осуществляет торможение отцепов, в зависимости от их веса. Клещи образуются тормозными балка ми литой конструкции;
-клещевидно-нажимной подъемный замедлитель (КНП) создан на базе замедлителя типа T50. Замедлитель снабжен устройством, которое позво ляет поднимать и опускать силовую систему и менять по высоте положение балок при торможении, обладает большей тормозной мощностью по срав нению с замедлителем T-50.
Внастоящее время новые горки или реконструируемые системами APC ЦНИИ и APC ГТСС не оборудуются из-за ограниченного круга решаемых задач и конструктивных недостатков.
5.10.2. Комплексная система автоматизации управления сортировочной станцией
Разработана (и в настоящее время внедряется) комплексная система автоматизации управления сортировочной станцией КСАУ CC, ее особенностью является объединение уровней планирования и управления в единое целое на основе общей информационной базы. Это позволит создать единую базу данных для всех служб участвующих в технологическом процессе работы станции и автоматизировать работу не только горки, но и всей станции.
Создание КСАУ CC позволит повысить безопасность работы станции, за счет исключения случаев проезда запрещающих сигналов средствами ГАЛС P, автоматизировать управление надвигом и роспуском составов, ввести контроль за обработкой состава, исключить опасный труд сигналистов по закреплению составов и регулировщиков скорости по вытормаживанию отцепов. Компонентами системы КСАУ CC являются:
-подсистема горочной автоматической централизации на микропроцес сорах (ГАЦ MH);
-подсистема горочного программнозадающего устройства (ГПЗУ);
-подсистема устройства управления прицельным торможением (УУПТ);
256
-подсистема горочнои автоматической локомотивной сигнализации по радиоканалу (ГАЛС P);
-подсистема автоматизации управления компрессорной станции (КСАУ КС);
-подсистема контроля и диагностики станционных устройств (КДК СУ ГАЦ).
Горочное программно-задающее устройство ГПЗУ должно осуществлять
контроль правильности расцепки вагонов, управлять указателями количества вагонов (для расценщиков перед горбом горки), выполнять автоматическую коррекцию ввода маршрутов в ГАЦ. Для решения этих задач в АРМ ДСПГ системы ГПЗУ вводится информация о подходе поездов в парке прибытия и их готовности к расформированию, предусмотрена возможность для корректировки сортировочного листка, ведения накопления вагонов в сортировочном парке и выбора оптимального варианта очередности роспуска составов. Подсистема ГПЗУ рассчитывает для ГАЛС P значения скорости роспуска, организует ввод программы роспуска в ГАЦ MH, управляет показаниями горочного светофора по пути надвига и указателями количества вагонов.
Система ГАЦ MH (вместо устаревшей системы ГАЦ) осуществляет управление маршрутами движения отцепов в процессе роспуска, корректирует программу роспуска с точностью до вагона, контролирует накопление вагонов в сортировочном парке и маневры между роспусками. Подсистема ГАЦ MH во взаимодействии с ГАЛС P позволяет безопасно вести роспуск и маневры.
Для этого перед каждым стрелочным участком устанавливается путевой датчик ПД (устройство счета осей УСО), который позволяет определять маршрут очередного отцепа, количество вагонов в нем, распознавать направление движения при маневрах, предотвращая взрез стрелок. Инфор - мация об отцепах поступает в ГАЦ MH из сортировочного листка и расшифровывается по инвентарному номеру входящих в отцеп вагонов. Информация о вагонах учитывает характеристику вагонов, особые признаки и геометрические размеры.
Устройство управления прицельным торможением УУПТ. Для реализа-
ции всех этапов работы УУПТ применяют внедряемые в настоящее время новые типы замедлителей ВЗПГ (см. рис. 5.17) и КЗ (см. рис 5.16) для горочных позиций и PH3-2M для парковых позиций, новые типы скоростемеров и весомеров, новые системы контроля заполнения путей КЗП. Это создает условия для повышения качества и точности вытормаживания отцепов, контроля заполнения путей сортировочного парка. Новые замедлители приведены на рис. 5.20 и 5.21.
Индуктивно-проводной датчик ИПД обеспечивает контроль занятости предстрелочного участка. Он применяется на последней стрелке сортиро - вочного пучка. Аналогичный датчик применяется и в системах контроля занятости путей КЗП.
Горочная автоматическая локомотивная сигнализация ГАЛС P с переда-
чей информации по радиоканалу и телеуправлением локомотивов. Одно - временно с роспуском информация об отцепах и вагонах в отцепах вводится в ГАЦ MH и синхронно с роспуском, вводится информация в ГАЛС P о
257

скорости движения, параметрах состава, его отцепах. Система ГАЛС Ρ обеспечивает радиоуправление маневровыми локомотивами и имеет расширенную зону управления, включающую не только пути и горловины парка прибытия, но и других парков станции.
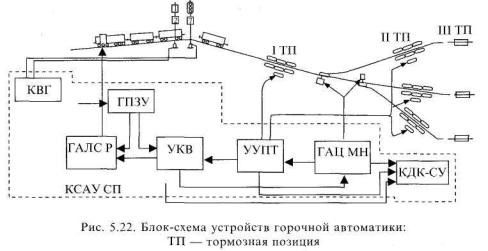
Подсистема горочной автоматической локомотивной сигнализации (ГАЛС Р) реализует скоростные режимы надвига, роспуска и осаживания вагонов с обеспечением безопасности этих операций, контролирует местоположение горочных локомотивов в предгорочном парке, а также осуществляет контроль за перемещением маневровых локомотивов, работающих на станции. Связь между подсистемами комплексной системы автоматиза - ции управления сортировочной станцией (КСАУ СС) показана на рис. 5.22.
Подсистема КСАУ КС обеспечивает управление компрессорами в автоматическом режиме, контролирует рабочие параметры компрессоров, давление сжатого воздуха в пневмосети.
Подсистема КДК СУ ГАЦ обеспечивает постоянный контроль состояния и параметров горочных устройств, для их обработки, отображения и хранения, обеспечивает контроль и диагностику устройств горочной автоматической централизации.
Кроме того, система КСАУ СС включает в себя автоматизированные рабочие места (АРМ) оперативного и обслуживающего персонала.
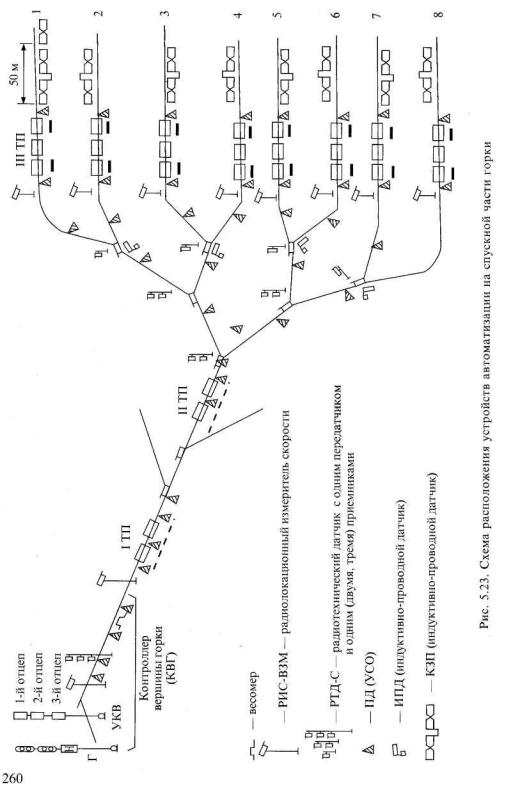
На спускной части горки устанавливают устройства контроля головной зоны КВГ, которые размещены на двух контрольных точках. На первой контрольной точке, в зоне отрыва отцепа устанавливаются путевой датчик
258
(счетчик осей УСО), радиотехнический датчик с одним передатчиком и тремя приемниками РТД-С для фиксации отрыва отцепа, радиолокационные измерители скорости РИС -ВЗМ для определения скорости надвига и скатывания, указатель количества вагонов УКВ.
На второй контрольной точке устанавливаются счетчики осей УСО и весомер для поосного взвешивания осей. Информация с путевых датчиков, РТД-С, РИС-ВЗМ поступает в КВГ и обрабатывается.
Указатель количества вагонов УКВ получает от КВГ информацию для отображения на индикаторах количества вагонов в трех очередных отцепах.
Перед вершиной горки, в головной зоне и на каждой тормозной позиции устанавливают радиолокационные измерители скорости РИС-ВЗМ для фиксации и регистрации фактической скорости. В автоматическом режиме сравниваются значения фактической и расчетной скоростей, и определяется интенсивность и время торможения отцепов замедлителями. Размещение устройств автоматизации на спускной части горки показано на рис. 5.23.
Контроль заполнения путей (КЗП). В зоне КЗП размещаются линейный пункт (на 24 пути в сортировочном парке) и индуктивно-проводные датчики КЗП (18 датчиков на один путь, 450 м).
5.11. Проектирование сортировочных станций 5.11.1. Общие понятия
Сортировочные станции проектируются с выполнением основных норм, правил и требованиям к проектам станций.
При переустройстве станций изучают объем работы станции, ее схему, имеющиеся устройства на станции, организацию маневровой работы, все передвижения по станции, недостатки и узкие места в схеме станции. Изучается роль станции на сети. Подбираются необходимые данные: план станции и профиль пути, размеры выполняемой работы на момент проектиро-
259