

249
Паттерн State
Название
Состояние
Также известен как
FSM (Finite-State Machine) - КА (Конечный автомат или Машина состояний)
Классификация
По цели: поведенческий По применимости: к объектам
Частота использования
Средняя |
- 1 2 3 4 5 |
Назначение
Паттерн State – позволяет объекту изменять свое поведение в зависимости от своего состояния. Поведение объекта изменяется на столько, что создается впечатление, что изменился класс объекта.
Введение
Паттерн State описывает способы и правила построения объектно-ориентированного представления конечных автоматов (КА). Конечные автоматы классифицируются по логическим свойствам функций переходов и выходов, а также по характеру отсчёта дискретного времени.
По способу формирования функций выходов выделяют автоматы Мили и Мура. У автоматов Мили функции выходов находятся на ребре, а у автоматов Мура функции выходов находятся в состоянии. По характеру отсчёта дискретного времени автоматы делятся на синхронные и асинхронные.
Конечный автомат Мили
Рассмотрим простейший тип конечно-автоматного преобразователя информации: Автомат Мили. Определим конечный автомат формально. Есть и другие определения, но мы остановимся на этом.
ОПРЕДЕЛЕНИЕ: Конечным автоматом Мили называется шестерка объектов:
A= <S, X, Y, s0, δ, λ>, где:
S - конечное непустое множество (состояний);
X - конечное непустое множество входных сигналов (входной алфавит)
Y - конечное непустое множество выходных сигналов (выходной алфавит)
- начальное состояние
: × → - функция переходов
: × → - функция выходов
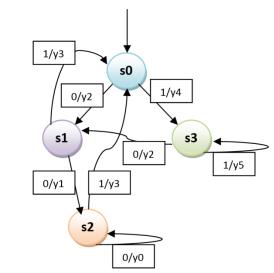
Задавать автомат удобно графом, в котором вершины соответствуют состояниям, а ребро из состояния sn в состояние sm, помеченное x/y, проводится тогда, когда автомат из состояния sn под воздействием входного сигнала x переходит в состояние sm с выходной реакцией y.
250
ПРИМЕР:
Зададим конечный автомат, который имеет:
четыре состояния, S = {s0, s1, s2, s3}
два входных сигнала X = {x0, x1}, где: x0 = 0, x1 = 1
шесть выходных сигналов Y = {y0, y1, y2, y3, y4, y5} где: y0 = 1, y1 = 2, y2 = 3, y3 = 4, y4 = 5, y5 = 6.
Теперь представим автомат в виде графа:
Граф 1.
Кроме графического представления автомата, можно использовать и табличное, задавая функции переходов и выходов в виде таблиц. Представим данный автомат таблично. Таблица 1 - определяет функцию переходов автомата из одного состояния в другое.
Функция переходов δ (sn, xn) определяется так: δ (s0, 0) = s1; δ (s2, 1) = s0; ….
δ |
0 |
1 |
|
|
|
s0 |
s1 |
s3 |
|
|
|
s1 |
s2 |
s0 |
|
|
|
s2 |
s2 |
s0 |
|
|
|
s3 |
s1 |
s3 |
|
|
|
Таблица 1.
Таблица 2 - определяет функцию выходов λ (sn, xn) так: λ (s0, 0) = y2; λ (s2, 1) = y3; ….
λ |
0 |
1 |
|
|
|
s0 |
y2 |
y4 |
|
|
|
s1 |
y1 |
y3 |
|
|
|
s2 |
y0 |
y3 |
|
|
|
s3 |
y2 |
y5 |
|
|
|
Таблица 2.
251
Реализация конечного автомата Мили
Для программной реализации будет использоваться язык C# и технология WWF – как инструменты, упрощающие реализацию программных конечных автоматов. На рисунке 1, представлена блок-схема (WWF) программы, реализующей поведение автомата.
Рисунок 1.
Нетрудно увидеть, что топология блок-схемы программы повторяет топологию графа переходов конечного автомата. С каждым состоянием связана операция, выполняющая функцию ожидания очередного события прихода нового входного сигнала и чтение его в стандартный буфер – int x, а также последующий анализ того, какой это сигнал. В зависимости от того, какой сигнал пришел на вход, выполняется та или иная функция y0 – y5 и происходит переход к новому состоянию. Построив программу подобную этой и добавив активные устройства, реализующие отдельные входные и выходные операции, можно управление каким-либо процессом поручить компьютеру.
См. Пример к главе: \020_State\002_MealyStateMachine
Конечный автомат Мура
Рассмотрим еще один тип конечно-автоматного преобразователя информации: Автомат Мура. Автоматы Мура образуют другой класс моделей, с точки зрения вычислительной мощности полностью эквивалентных классу автоматов Мили. В автомате Мура: A = <S, X, Y, s0, δ, λ>, выходная функция λ определяется не на паре <состояние, входной сигнал>, а только на состоянии : → . Выход автомата Мура определяется однозначно тем состоянием, в которое автомат переходит после приема входного сигнала.
252
ПРИМЕР:
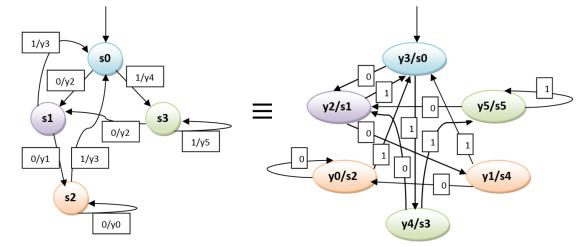
Зададим конечный автомат Мура, который будет являться эквивалентным автомату Мили, рассмотренному выше. Не составит труда преобразовать исходный автомат Мили в автомат Мура. На графе автомата Мили легко прослеживается взаимосвязь элементов входного и выходного алфавитов.
Построив таблицу соответствий состояний автомата Мили алфавитным парам, легко увидеть какие состояния требуют расщепления.
|
x0 |
x1 |
Расщепление состояния S |
|
|
|
|
s0 |
y3 |
y3 |
Не требуется |
|
|
|
|
s1 |
y2 |
y2 |
Не требуется |
|
|
|
|
s2 |
y0 |
y1 |
s2 = {s2, s4} |
|
|
|
|
s3 |
y4 |
y5 |
s3 = {s3, s5} |
|
|
|
|
Таблица 3.
Состояния s2 и s3 автомата Мили расщепляются на два эквивалентных состояния: s2 = {s2, s4}, s3 = {s3, s5}, с каждым из которых связывается один выходной символ.
Автомат Мура будет иметь:
шесть состояний, S = {s0, s1, s2, s3, s4, s5}
два входных сигнала X = {x0, x1}, где: x0 = 0, x1 = 1.
шесть выходных сигналов Y = {y0, y1, y2, y3, y4, y5} где: y0 = 1, y1 = 2, y2 = 3, y3 = 4, y4 = 5, y5 = 6.
Теперь представим автомат Мура в виде графа (в сравнении с автоматом Мили):
Автомат Мили |
Автомат Мура |
Граф 2.

253
Реализация конечного автомата Мура
На рисунке 2, представлена блок-схема (WWF) программы реализующей поведение автомата Мура.
Рисунок 2.
Нетрудно увидеть, что топология блок-схемы программы повторяет топологию графа переходов конечного автомата. С каждым состоянием связана операция, выполнения определенных действий при наступлении данного состояния, ожидания прихода нового входного сигнала, чтение его в стандартный буфер – int x, а также последующий анализ того, какой это сигнал и перевод автомата в новое состояние.
См. Пример к главе: \020_State\003_MooreStateMachine
Рассмотренные программные модели автоматов Мура и Мили - полностью эквивалентны.