

6 Дослідження перехідних характеристик імпульсних систем автоматичного управління
6.1 Мета роботи
Метою роботи є дослідження перехідних характеристик імпульсних САУ при різних видах модуляції імпульсного сигналу.
6.2 Методичні вказівки з організації самостійної роботи студентів
Під час підготовки до лабораторної роботи студенти повинні повторити відповідний лекційний матеріал і дані практичних занять, ознайомитися з матеріалами, наведеними у літературі [3-9], а саме: імпульс, параметри імпульсу, види та роди модуляції, решітчасті функції, різницеві рівняння, Z-перетворення, передавальні функції імпульсних САУ; перехідні характеристики імпульсних САУ.
Програмою досліджень лабораторної роботи є побудова перехідних характеристик імпульсної системи при різних видах модуляції та параметрів модульованого сигналу.
Визначення імпульсної системи автоматичного управління пов'язане з поняттям імпульсу та імпульсних сигналів, тому коротко охарактеризуємо ці поняття.
Імпульсом тривалості називається процес, який описується функцією, всюди рівною нулю за винятком деякого інтервалу заданої тривалості. Схему імпульсу зображено на рис. 6.1.
s(t)

Аі
t/
t + і
t
Рисунок 6.1 – Схема імпульсу
Імпульс може мати різноманітну форму: прямокутну, синусоїдальну, трикутну та ін.

Імпульси характеризуються тривалістю , амплітудою A , періодом T , частотою проходження 1 T , положенням щодо фіксованих моментів часу

(тактових
точок), а також відносною тривалістю
 T
.
T
.
54
Послідовність імпульсів називається модульованою, якщо один з її параметрів змінюється відповідно до заданого сигналу.
Імпульсний елемент (імпульсний модулятор) – це елемент, який перетворює безперервний сигнал в імпульсний.
Імпульсна система автоматичного управління – це система, що містить імпульсний елемент.
Імпульсний сигнал – це модульована послідовність імпульсів.
Залежно від того який параметр модулюється розрізняють такі види модуляцій (рис. 6.2):
– амплітудно-імпульсна модуляція (АІМ) – це модуляція, при якій модулюється амплітуда (висота) вихідних імпульсів; при цьому тривалість імпульсів і період проходження залишаються незмінними;
– широтно-імпульсна модуляція (ШІМ) – це модуляція, при якій модулюється тривалість (ширина) вихідних імпульсів; при цьому амплітуда імпульсів і період проходження залишаються незмінні;
– частотно-імпульсна модуляція – це модуляція, при якій модулюється частота повторення імпульсів у вихідній імпульсній послідовності, при цьому амплітуда і тривалість постійні.
Розглянуті види модуляції прийнято підрозділяти на модуляцію першого роду і модуляцію другого роду (рис. 6.3).
Під час модуляції першого роду модульований параметр змінюється відповідно до значень вхідного сигналу у дискретні моменти часу; тобто модульовані параметри імпульсів визначаються тільки значеннями модулюючого сигналу у фіксовані дискретні моменти часу і не залежать від зміни сигналу між ними.
Під час модуляції другого роду модульований параметр змінюється відповідно до поточних значень вхідного сигналу протягом усього часу існування імпульсу, тобто значення модульованого параметру визначаються модулюючим сигналом, визначеним на кінцевому інтервалі часу.
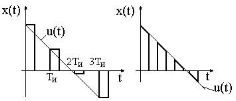
Решітчаста функція – це функція, яка приймає значення вихідного сигналу тільки у дискретні моменти часу, що відповідають моментам знімання сигналу:
U [iTи ]
u(t ) при t
iTи ;
0при t
iTи ;




55
s(t)
у(t)
а)
t
x(t)
б)
t
у(t)
в)
t
у(t)
t
г)
Рисунок 6.2 – Види модуляції: а) – сигнал, який генерується імпульсним елементом, б) – амплітудно-імпульсна модуляція,
в) – широтно-імпульсна модуляція, г) – частотно-імпульсна модуляція
56
а) б)
Рисунок 6.3 – Рід модуляції:
а) – модуляція першого роду, б) – модуляція другого роду
6.3 Опис лабораторної установки
Лабораторна робота виконується у середовищі Matlab за допомогою пакета моделювання динамічних систем Simulink. Опис лабораторної установки наведено у пункті 1.3.
6.4 Порядок виконання роботи та методичні вказівки з її виконання
Запустити у програмі Matlab пакет моделювання динамічних систем Simulink.
6.4.1 Дослідження перехідного процесу імпульсної САУ з АІМ першого роду
Зібрати модель імпульсної САУ з АІМ першого роду (рис. 6.4), яка складається з генератора вхідного сигналу, передавальної функції лінійної САУ, елемента дискретизації та дослідити вплив кроку дискретизації на вигляд перехідного процесу.

Рисунок 6.4 – Віртуальний макет імпульсної САУ з АІМ першого роду при різних кроках дискретизації
57
Для формування вхідного сигналу використовуємо блок Step (сигнал прямокутної форми) з бібліотеки блоків Sources.
Для отримання графіків перехідних характеристик системи встановлюємо осцилограф (Sinks/Scope).
Блок переданої функції Transfer Fcn (бібліотека Continuous) задає передавальну функцію у вигляді співвідношення поліномів – вектора коефіцієнтів чисельника та вектора коефіцієнтів знаменника.
Блок екстраполятора вхідного нульового порядку Zero-Order Hold виконує дискретизацію вхідного сигналу за часом.
6.4.2 Дослідження імпульсної САУ з АІМ другого роду
Зібрати модель імпульсної САУ з АІМ другого роду (рис.6.5).
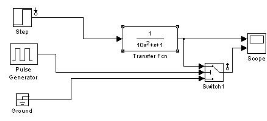
Рисунок 6.5 – Віртуальна модель імпульсної САУ з АІМ другого роду
Для формування вхідного сигналу використовуємо:
блок Step (сигнал прямокутної форми) з бібліотеки блоків Sources;
блок Pulse Generator (бібліотека Sources);
блок Switch (бібліотека Signal Routing);
блок Ground (бібліотека Sources).
У блоці Switch встановлюється умова, під час виконання якої сигнал проходить через вхід 1 (вхід 3 відімкнений), якщо умова не виконується, то сигнал проходить через вхід 3 (вхід 1 відімкнений). Умова у блоці Switch задається критерієм u2>=Threshold, де Threshold – значення, що встановлюється користувачем. Тобто, коли на вході 2 блока Switch є сигнал, значення якого більше значення Threshold, то на виход перемикача пропускається сигнал з першого входу; інакше – сигнал з третього входу.
До другого входу перемикача підключається генератор імпульсів, за допомогою якого формується послідовність імпульсів (тобто визначається, коли сигнал проходить через вхід 1 під час виконання умови u2>=Threshold).
58
Для отримання графіків перехідних характеристик системи до моделі додається осцилограф (Sinks/Scope). Для збільшення кількості вхідних портів необхідно двічі натиснути ліву клавішу миші на осцилографі та у вікні, що з’явилося, натиснути значок настройки параметрів (рис. 6.6), значення кількості вхідних портів осцилографа ввести у поле Number of Axes.

Параметри
осцилографу
Кількість
вхідних
Рисунок 6.6 – Настройка осцилографа
6.4.3 Дослідження імпульсної САУ з ШІМ
Зібрати лабораторний макет для моделювання імпульсної САУ з ШІМ
(рис. 6.7).

Рисунок 6.7– Віртуальний макет для моделювання імпульсної САУ з ШІМ
Для формування вхідного сигналу використовуємо:
блок Sine Wave (бібліотека Sources);
блок Repeating (бібліотека Sources);
59
блок Substruct;
блок Sign.
6.5 Зміст звіту
Загальні правила оформлення матеріалів звіту наведено у вступі до методичних вказівок.
теоретичній частині слід навести різницеві рівняння, які описують досліджувані системи та перехідні функції імпульсних систем.
В експериментальній частині навести створені віртуальні моделі та графіки перехідного процесу за різних видів модуляції.
висновках потрібно проаналізувати, як впливає вид модуляції на перехідний процес імпульсної системи.
6.6 Контрольні запитання та завдання
Визначіть імпульсні САУ.
Що таке імпульсний елемент?
Перелічіть параметри імпульсу.
Що таке модульована послідовність імпульсів?
Назвіть види імпульсної модуляції.
Як змінюється модульований параметр під час модуляції першого роду?
Як змінюється модульований параметр під час модуляції другого роду?
Що таке амплітудно-імпульсна модуляція?
Що таке широтно-імпульсна модуляція?
Що таке частотно-імпульсна модуляція?
Які три операції містить у собі Z-перетворення?
Як визначити дискретну передавальну функцію розімкнутої системи?
Як визначити дискретну передавальну функцію замкнутої системи?
Визначте поняття решіткової функції,
60