

3 Дослідження стійкості та якості лінійних сау
3.1 Мета роботи
Метою даної роботи є дослідження методів оцінки стійкості систем автоматичного управління, експериментальне знаходження меж стійкості, визначення показників якості у стійких САУ.
3.2 Методичні вказівки з організації самостійної роботи студентів
Під час підготовки до лабораторної роботи студенти повинні повторити відповідний лекційний матеріал і дані практичних занять, ознайомитися з матеріалами, наведеними у літературі [3-+9], а саме: визначення та умови стійкості лінійних неперервних систем; визначення стійкості за Ляпуновим, асимптотична стійкість; алгебраїчні та частотні критерії стійкості, методи визначення області стійкості системи за одним та за двома параметрами, показники якості системи у перехідному та сталому режимах.
Програмою досліджень лабораторної роботи є:
– побудова заданої структурної схеми САУ;
– оцінка стійкості САУ за перехідною характеристикою системи;
– розрахунок області стійкості САУ та визначення критичного значення коефіцієнта підсилення системи;
– оцінка стійкості САУ за алгебраїчними та частотними критеріями стійкості;
– розрахунок показників якості стійкої системи за різних параметрів системи. До початку виконання роботи студенти повинні знати методи визначення
стійкості системи і вміти розраховувати область стійкості системи та показники якості у перехідному та сталому режимах.
Стійкість систем автоматичного управління є однією з основних умов її працездатності і містить вимогу загасання у часі перехідного процесу системи.
Характеристичне рівняння лінійної неперервної системи автоматичного управління має вигляд:


a0
n
a1
n 1
... an
0 ,
(3.1)





де ai – задані коефіцієнти, n – порядок системи.
27
Необхідна та достатня умова стійкості лінійних систем полягає у тому, що всі корені характеристичного рівняння системи мали негативні дійсні частини Re i 0 .

Зазвичай корені з негативними дійсними частинами називають лівими, оскільки вони у комплексній площині коренів розташовані зліва від уявної осі, а корені з позитивними дійсними частинами – правими.
Алгебраїчні критерії дозволяють оцінити стійкість САУ за коефіцієнтами характеристичного рівняння (3.1).
Під час дослідження стійкості за допомогою алгебраїчних критеріїв, необхідно, перш за все, перевірити виконання необхідної умови стійкості, оскільки ця перевірка не потребує ніяких розрахунків і за невиконання цієї умови подальші розрахунки проводити не потрібно.
Необхідна умова стійкості лінійних систем полягає у тому, що коефіцієнти
характеристичного рівняння системи мають буии одного знака:
a0 0, a1 0, ...., an 0 або a0
0,
a1
0, ...., an 0
(3.2)
Якщо необхідна умова не виконується, то система нестійка. Якщо
необхідна умова виконується, то система при
n
3
може бути стійкою або







нестійкою. Для встановлення стійкості необхідно скористатися яким-небудь критерієм стійкості. Для систем першого та другого порядків необхідна умова (3.2) є і достатньою.
Алгебраїчний критерій стійкості Гурвіца формулюється так: для того, щоб система автоматичного управління була стійкою, необхідно та достатньо,




щоб усі визначники Гурвіца були додатними i
0, i 1, n при а0 0 .
Для того, щоб скористатися критерієм Гурвіца, спочатку будують головний
визначник Гурвіца за таким правилом: на головній діагоналі
розташовують
коефіцієнти у порядку збільшення їх індексів,
починаючи з а1
та закінчуючи
ап . У кожному стовпчику під час руху від елемента, який знаходиться на головній діагоналі, вверх індекси коефіцієнтів збільшуються, вниз – зменшуються. При цьому на місці елементів з індексами, які перевищують п (під час руху вверх), та від’ємними індексами (під час руху вниз) ставляться нулі.
a1
a3
a5 ...
0
a0
a2
a4 ...
0
n
0
a1
a3 ...
0
(3.3)
...
...
... ...
0
0
0
0 0
an


28
Відкреслюючи у головному визначникові Гурвіца діагональні мінори, отримуємо визначники Гурвіца нижчого порядку:
a1
a3
,
a1
a3
a5
.
(3.4)
a ,
3
a
0
a
2
a
4
1
1
2
a0
a2
0
a1
a3
З критерію Гурвіца випливає,
що при n
3 необхідна та достатня умова
стійкості така:
а0 0 , 1
a1
0,
2
a1a2
a0 a3
0,
3a3 2
0 .
(3.5)
Використовуючи
критерій
Гурвіца,
можна
за
заданими
параметрами



















системи прийняти за невідомий будь-який один параметр (наприклад, коефіцієнт підсилення) та визначити його граничне або критичне значення, за якого система знаходитиметься на межі стійкості.
Алгебраїчний критерій стійкості Льєнара – Шипара формулюється так: якщо всі коефіцієнти характеристичного рівняння системи додатні, то для її стійкості необхідно та достатньо, щоб були додатними всі визначники Гурвіца з
парними або непарними індексами.
а0
0 , а1
0 ,…, ап
0 ;
2
0 ,
4
0 ,
6
0 …,
або
а0
0 , а1
0 ,…, ап
0 ;
3
0 ,
5
0,
7
0 …
Критерій
Льєнара – Шипара
потребує
розкриття
меншої кількості


















визначників, ніж критерій Гурвіца, і тому зручніший для дослідження стійкості САУ високого порядку.
Частотні критерії стійкості дозволяють судити про стійкість САУ за її частотними характеристиками. Ці критерії є графоаналітичними та отримали широке розповсюдження, оскільки вони дозволяють порівняно легко досліджувати стійкість САУ високого порядку, а також мають наочність і просту геометричну інтерпретацію.
Частотний критерій стійкості Михайлова формулюється так: для того, щоб система автоматичного управління була стійкою, необхідно та достатньо,


щоб крива Михайлова при зміні частоти від 0 до , починаючись при
а0 0 на дійсній додатній півосі, обходила послідовно n квадрантів (чвертей) координатної площини проти руху годинникової стрілки, не потрапляючи у початок координат.

Крива Михайлова для стійких систем має плавну спіралеподібну форму, та кінець її прямує до нескінченності у квадранті, номер якого дорівнює ступеню характеристичного рівняння (рис. 3.1).
29

Рисунок 3.1 – Приклади кривих Михайлова для стійких САУ
Критерій Михайлова застосовують для дослідження стійкості як розімкнутих, так і замкнутих систем. Частотний критерій Найквіста призначений для дослідження тільки замкнутих систем автоматичного управління. Він дозволяє за видом амплітудно-фазової частотної характеристики розімкнутої системи робити висновки про стійкість замкнутої системи.
Частотний
критерій Найквіста формулюється так:
для того, щоб замкнута система була
стійкою, необхідно та достатньо, щоб
АФЧХ її розімкнутої системи зі зростанням
частоти від 0
до
 охоплювала
точку ( 1;j0
) у
охоплювала
точку ( 1;j0
) у

додатному напрямку, тобто проти руху годинникової стрілки, l 2 разів, де l –

кількість правих коренів характеристичного рівняння розімкнутої системи. Зокрема, якщо розімкнута система стійка ( l 0 ), то для того, щоб

замкнута система була стійкою, необхідно та достатньо, щоб АФЧХ її розімкнутої системи не охоплювала точку ( 1; j0) .

Для стійких систем автоматичного управління розраховують показники якості у перехідному та сталому режимах. У перехідному режимі показники якості поділяють на прямі та непрямі.
Прямі показники якості визначаються безпосередньо за перехідною характеристикою САУ. До прямих показників відносять час регулювання та перерегулювання.
Час регулювання t p – це мінімальний час, по закінченні якого (з моменту подачі східчастого впливу) відхилення вихідної величини від сталого значення
30
не
перевищує певної заданої величини (0.05
÷ 0.1)
 h
,
де
h
h
,
де
h – стале значення перехідної характеристики.
– стале значення перехідної характеристики.


Перерегулювання – максимальне відхилення перехідної характеристики
від сталого значення (рис. 3.2):
hm
h
100%
,
(3.6)
h





де hm – максимальне значення перехідної характеристики

Рисунок 3.2 – Графік перехідної характеристики
Непрямі показники якості поділяються на кореневі, частотні та інтегральні. До кореневих показників якості відносять ступінь стійкості та коливальність. Ступінь стійкості визначається як відстань від уявної осі до найближчого



кореня характеристичного рівняння досліджуваної системи
min
Re
,

де
 –
корінь характеристичного рівняння.
–
корінь характеристичного рівняння.
Ступінь стійкості характеризує швидкодію системи: за інших рівних умов чим більше , тим швидше загасає перехідний процес.

Коливальність характеризує міру схильності системи до коливань. Коливальність визначається як максимальне значення відношень уявної частини кореня характеристичного рівняння системи до дійсної.


max
Im
.
(3.7)
Re




До частотних показників якості належать запас стійкості за амплітудою та запас стійкості за фазою. Частотні показники якості можна розрахувати двома способами: за допомогою логарифмічних частотних характеристик (рис. 3.3) та амплітудно-фазової частотної характеристики (рис. 3.4).
31

Рисунок 3.3 – Схема розрахунку частотних показників якості за логарифмічними частотними характеристиками

Запас стійкості за фазою (рис. 3.3) визначається як відстань від ЛФЧХ до прямої ( ) на частоті зрізу. Частота зрізу с – це частота, на якій ЛАЧХ перетинає вісь частот.



Запас стійкості за амплітудою L (рис. 3.3) визначається як відстань від

ЛАЧХ до jсі частот на частоті, на zrsq ЛФЧХ перетинає пряму ( ) .

Рисунок 3.4 – Схема розрахунку частотних показників якості за амплітудно-фазовою частотною характеристикою
До інтегральних показників якості відносять інтегральну помилку J 0 , яка визначається під час аперіодичного та монотонного перехідного процесу, та квадратичну інтегральну помилку J01 , яка визначається під час коливального перехідного процеса:






J 0
eп (t)dt , J 01
eп2 (t)dt ,
(3.8)
0
0
32
де en (t) – перехідна складова помилки:
eп (t)
h(
) h(t) .
(3.9)
У сталому режимі роботи системи розраховують помилку від задаючого
впливу:
C g1 dg(t)
C g 2 d 2 g(t)
C gi
d i g(t)
eg
(t) C g 0 g(t)
...
,
(3.10)
1!dt
2!
dt 2
i!
dt i
де C gi – коефіцієнти помилок:
d iWeg
(s)
Сgi
.
(3.11)
dsi
s 0
Перші три коефіцієнти мають такі назви: C g 0
називають коефіцієнтом
позиційної
помилки та розраховують за формулою
(3.12), Cg1
– коефіцієнтом швидкісної помилки та
розраховують за формулою (3.13), C
g
2
– коефіцієнтом помилки за прискоренням
та розраховують за формулою (3.14).









С g 0
Weg (0) .
(3.12)
dWeg
(s)
С g1
.
(3.13)
ds
s
0
d 2Weg
(s)
С g 2
.
(3.14)
ds 2
s
0
Система є статичною за впливом
g якщо C g 0 0 . Якщо С g 0
0 , то
система астатична за впливом g .
За постійного зовнішнього впливу g
g 0
стала помилка eg (t) Сg0
g(t)











і у статичних системах вона відмінна від нуля, а в астатичних – дорівнює нулю. Астатична система має астатизм порядку r , якщо перші r коефіцієнтів

помилок дорівнюють нулю, а r 1 коефіцієнт відмінний від нуля.
Система є астатичною за задаваним впливом у тому випадку, якщо вона містить у передавальній функції системи інтегруючу ланку.
3.3 Опис лабораторної установки
Лабораторна робота виконується у середовищі Matlab за допомогою пакета моделювання динамічних систем Simulink. Опис лабораторної установки наведено у пункті 1.3.
33
3.4 Порядок виконання роботи та методичні вказівки щодо її виконання
3.4.1 Зібрати віртуальний лабораторний макет (рис. 3.5), до складу якого входять такі блоки:
– блок Step (з бібліотеки Simulink/Sources) – генератор одиничного ступінчастого сигналу;
– блок TransferFunction (з бібліотеки Simulink/Continuous) – передавальна функція;
– блок Gain (з бібліотеки Simulink/Continuous) – задає коефіцієнт підсилення системи;
– блок Subtract (з бібліотеки Simulink/Math Operations) –для створення від’ємного зв’язку;
– блок Scope (з бібліотеки Simulink /Sinks) – осцилограф для візуалізації процесу моделювання.
Замість коефіцієнтів підставити відповідні значення, визначені у завданні відповідно до варіанту (Додаток В).

Рисунок 3.5 – Віртуальний макет для моделювання перехідної характеристики лінійної САУ
Провести моделювання та визначити за виглядом перехідної характеристики стійкість досліджуваної системи.
3.4.2 Експериментально визначити критичне значення коефіцієнта підсилення. Для цього необхідно, змінюючи коефіцієнт підсилення системи, знайти такий коефіцієнт, щоб система знаходилася у режимі автоколивання.
Розрахувати критичне значення коефіцієнта підсилення Ккр за допомогою критерія стійкості Гурвіца. Для цього слід записати характеристичне рівняння замкнутої системи. Коефіцієнт з індексом 3 та визначник Гурвіца з індексом 2 дорівнює 0 (a3=0 та 2 =0). Отримати значення Ккр та визначити область стійкості системи. Порівняти з результатами експериментальних досліджень.
Отримати графіки перехідної характеристики системи при різних значеннях коефіцієнту підсилення: К=Ккр, К=0,5Ккр, К=1,5Ккр.
34
3.4.3 Визначити стійкість досліджуваної системи та системи з коефіцієнтом підсилення К=0,5Ккр за коренями характеристичного рівняння.
На рис. 3.6 наведений фрагмент коду для визначення коренів характеристичного рівняння.
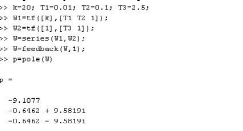
Рисунок 3.6 – Фрагмент програмного коду для визначення коренів характеристичного рівняння
Функція pzmap(W) автоматично будує графік розташування на комплексній площині полюсів та нулів передавальної функції W. Нулі на діаграмі позначаються кружечками, а полюси – хрестиками.
3.4.4 Оцінка стійкості за допомогою критерію Михайлова
Задамо в командному вікні характеристичне рівняння замкненої системи, передавальна функція якої міститься в програмній змінній W. Для визначення комплексного характеристичного поліному необхідно в командному вікні провести ряд дій (рис.3.7).

Рисунок 3.7 – Фрагмент програмного коду для визначення комплексного характеристичного поліному
35

Рисунок 3.8 – Фрагмент програмного коду для побудови кривої Михайлова
Використовуючи інструменти для масштабування, у вікні з графіком кривої Михайлова визначити кількість квадрантів, що проходить крива, та послідовність їх проходження (рис. 3.9).

Рисунок 3.9 – Графік кривої Михайлова
На підставі проведених побудов зробити висновок про стійкість системи.
36
3.4.4 Визначення стійкості за критерієм Найквіста
Для побудови АФЧХ досліджуваної системи необхідно використати команду nyquist(W), після чого відкриється вікно з графіком АФЧХ системи (рис. 3.10).

Рисунок 3.10 – АФЧХ досліджуваної системи
На підставі проведених будувань зробити висновок про стійкість системи за критерієм Найквіста.
3.5 Зміст звіту
Загальні правила оформлення матеріалів звіту визначено у вступі до методичних вказівок.
У теоретичній частині потрібно навести:
– структурну схему досліджуваної системи;
– характеристичне рівняння досліджуваної системи;
– розрахунок області стійкості та критичного значення коефіцієнта підсилення системи;
37
–розрахунки стійкості системи за алгебраїчними та частотними критеріями;
– для стійкої системи розрахунок показників якості у перехідному та сталому режимах.
В експериментальній частині навести перехідну характеристику системи, криву Михайлова, АФЧХ розімкненої системи, ЛАЧХ та ЛФЧХ замкненої системи при заданих значеннях параметрів системи, критичному коефіцієнті підсилення та зменшеному у два рази критичному коефіцієнті підсилення.
У висновках проаналізувати, як впливає значення параметрів ланки на стійкість та якість системи.
3.6 Контрольні запитання та завдання
Дайте визначення поняттю стійкості.
Сформулюйте поняття стійкості лінійних САУ за теоремою Ляпунова.
Що таке асимптотична стійкість?
Сформулюйте алгебраїчний критерій стійкості Гурвіца.
Сформулюйте алгебраїчний критерій стійкості Льєнара–Шипара.
Як визначити значення критичного коефіцієнта підсилення системи?
Що таке запас стійкості системи?
Як, не використовуючи критерії стійкості систем, оцінити стійкість системи?
Як скласти характеристичне рівняння системи?
Сформулюйте необхідні та достатні умови стійкості систем з характеристичним поліномом першого та другого порядків.
Що можна сказати про стійкість лінійної САУ, якщо один корінь характеристичного рівняння уявний, а решта – ліві?
Що таке критерії стійкості та чим викликана необхідність їх використання?
14. Сформулюйте критерій стійкості Михайлова.
15. Сформулюйте критерій стійкості Найквіста для випадку нестійкої розімкнутої системи.
16. Сформулюйте критерій стійкості Найквіста для випадку стійкої розімкнутої системи.
17. Які показники якості системи розраховуються у перехідному режимі? 18. Як за перехідною характеристикою системи розрахувати час регулювання
та перерегулювання?
19. Що таке ступінь стійкості системи? Опишіть методику розрахунку.
38
20. Що таке коливальність системи? Опишіть методику розрахунку.
21. Як визначити запас стійкості за амплітудою та фазою за логарифмічними частотними характеристиками системи?
22. Як визначити запас стійкості за амплітудою та фазою за амплітудно-фазовою частотною характеристикою системи?
23. Як розрахувати інтегральні показники якості системи під час аперіодичного та монотонного перехідного процесу?
24. Як розрахувати інтегральні показники якості системи під час коливального перехідного процесу?
25. Які показники якості системи розраховуються у сталому режимі? 26. Яка система є статичною?
27. Яка система є астатичною?
28. Що означає «астатична система має астатизм порядку r »?
29. Якщо передавальна функція системи містить інтегруючу ланку, якою є ця система?
39