

2.2 Расчет оптимальных настроек регуляторов аср
2.2.1 Расчет оптимальных настроек регуляторов аср графоаналитическим методом
Расчет параметров настройки автоматического регулятора данным методом заключается в определении такого коэффициента регулятора, при котором АФЧХ разомкнутой системы (объекта и регулятора) касалась, но не заходил в запретную зону, т.е. не должна заходить вовнутрь области, окружающей точку с координатами (– 1, j0) /4, 5/. Эта область представляет собой окружность радиусом:
![]() , (9)
, (9)
с центром, расположенным на отрицательной вещественной полуоси на расстоянии С от начала координат:
![]() . (10)
. (10)
Показатель колебательности М определяет величину запаса устойчивости и связан со степенью колебательности m следующей зависимостью:
![]() . (11)
. (11)
Угол α луча, проведенного из начала координат и касающегося окружности, определяется следующей зависимостью:
Sinα = R/C = 1/M. (12)
На рисунке 4 построена граница области с заданным показателем колебательности М.

Рисунок 4 – Построение границы области с заданным показателем
колебательности М
Методика расчета заключается в следующем:
1) Из начала координат проводят луч под углом α.
2) Для различных частот w строим АФЧХ разомкнутой системы с ПИ-регулятором:
W(jw) = W0(jw)∙Wp(jw), (13)
где W0(jw) – АФЧХ объекта управления;
Wp(jw) – АФЧХ ПИ-регулятора.
Выражение (13) можно привести к следующему виду:
W(jw) = W0(jw)∙Kp(1+(1/(j∙w∙Tи)). (14)
При Kр = 1 получим:
W (jw) = W0(jw) – j(W0(jw) /(w∙Tи)). (15)
Для построения АФЧХ объекта разомкнутой системы с Kp = 1 и некоторым временем изодрома Ти следуем к каждому вектору характеристики W0(jw) прибавить вектор (A0(w)/w∙Tи), повернутый на угол 90° по часовой стрелке.
3) Задавшись несколькими значениями времени изодрома Ти1,Ти2..., построить для каждого из них и Kp=1 АФЧХ разомкнутой системы.
4) Провести окружности соответствующих радиусов R1, R2..., касающихся АФЧХ разомкнутой системы и луча.
На рисунке 5 представлен пример построения АФЧХ разомкнутой системы и определения коэффициента усиления ПИ-регулятора.

Рисунок 5 – Построения АФЧХ разомкнутой системы и определения
коэффициента усиления ПИ-регулятора
5) Используя найденные R1, R2..., определить коэффициенты усиления регуляторов Kрi = 1/Ri, и построить границу области допустимого запаса устойчивости в плоскости Kp(Tи).
На рисунке 6 представлен пример построения границы области допустимого запаса устойчивости и определения оптимальных настроек ПИ-регулятора.
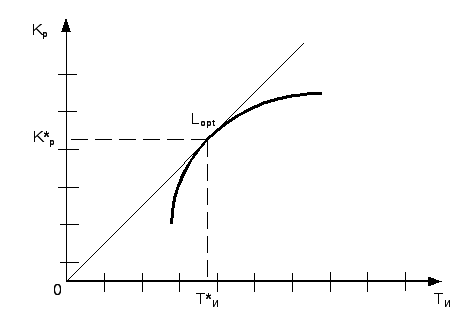
Рисунок 6 – Построения границы области допустимого запаса устойчивости и определения оптимальных настроек ПИ-регулятора
6) Провести касательную из начала координат. Точка касания Lорt, определяет оптимальные настройки ПИ-регулятора K*р и Т*и.
7) Найти для ПИ-регулятора диапазон дросселирования и время интегрирования.
Диапазон дросселирования показывает, насколько % должна измениться регулируемая величина относительно диапазона шкалы вторичного прибора, чтобы вызвать перемещение регулирующего органа из одного крайнего положения в другое и определяется по формуле /6/:
σ = 100/K*р. (16)
Время интегрирования – время, в течении которого интегральная составляющая входного давления регулятора изменяется на значение, равное рассогласованию, поданному на вход регулятора.