

сборник_индив_заданий_кинематика
.pdfОпределим скорость точки K . Точка K (ползун) является концом стержня KM , который движется возвратно-поступательно в направляющих. Значит, абсолютная скорость точки K направлена вдоль этих направляющих. Рассмотрим движение точки K как сложное. Подвижную систему координат свяжем с кривошипом
BO1 E , на который надет ползун K . Тогда движение ползуна вдоль стержня BO1 E относительное, а движение ползуна, жестко связанного со стержнем, переносное. Абсолютная скорость точки
определяется по формуле va vr ve , где |
v r |
– относительная |
|||||
|
k |
k |
k |
k |
|
|
|
скорость ползуна K при его движении вдоль стержня BO E , |
v e |
||||||
|
|
|
|
|
|
1 |
k |
– переносная скорость |
ползуна |
K , |
равная |
скорости точки |
K |
||
стержня BO1 E в данный момент времени. |
|
|
|
||||
Зная скорость точки E (на плане |
vE pe) , |
определим пере- |
|||||
носную скорость точки |
K . Обозначим на плане |
ve pke . Из от- |
|||||
|
|
|
|
|
|
k |
|
ношения pkе / pe O K / O E найдем |
pk е . Для определения v a |
по- |
|||||
1 |
1 |
|
|
|
|
k |
|
строим параллелограмм, в котором va |
pka |
– диагональ, а pkе и |
|||||
|
|
|
k |
|
|
|
|
pkr – стороны. Из конца вектора pkе |
на плане проведем луч, па- |
||||||
раллельный BO1 E , вдоль которого направлена v rk , до пересечения с прямой, проведенной из полюса p параллельно стержню KM , вдоль которой направлена v ak . Полученная точка пересече-
ния есть конец вектора v ak , vak pk a . Из этой точки ka проведем луч, параллельный pke, до пересечения с прямой, проведенной из полюса p параллельно кривошипу BO1 E . В точке пересечения получим конец вектора vrk , vrk pkr .
Скорость v ak точки M стержня KM равна абсолютной скорости точки K , так как стержень KM движется поступательно,
vM pm vak pka .
Для определения скорости точки F рассмотрим плоское движение стержня EL . Скорость точки E этого стержня известна, направление скорости точки F тоже известно. Вектор v F pf
60
построим аналогично определению скорости точки B пластины, учитывая, что ef EF .
Скорость точки L найдем, учитывая, что точка l на плане скоростей лежит на прямой ef , и используя свойство плана скоростей о подобии соответствующих многоугольников на плане и на плоской фигуре. Из отношения ef / fl EF / FL найдем вектор
v L pl .
Измеряем длины отрезков, изображенных на плане скоростей, и, пользуясь масштабом скоростей, получим их численные значения. Результаты запишем в табл. 8.2.
Определим угловые скорости звеньев механизма, используя свойство плана скоростей: соответствующие многоугольники на плане скоростей и на плоской фигуре подобны и коэффициент подобия равен угловой скорости плоской фигуры. Поэтому
|
|
|
ac |
1.7 (1/с) (или |
ab / AB, bc / BC и т.д.), |
||||||||||
ACBD |
|
||||||||||||||
|
|
AC |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где величину ac нашли измерением на плане скоростей с ис- |
|||||||||||||||
пользованием масштаба скоростей, ac 34 (1/с), AC 20 см. |
|||||||||||||||
Аналогично найдем |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
BO E |
pb |
|
60 |
3 (1/с), KM |
k a m |
0, |
||||||
|
|
|
O1B |
|
|
|
|||||||||
|
|
|
1 |
20 |
|
|
|
|
KM |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
ef |
|
82 |
2.73 (1/с). |
||||
|
|
|
|
|
EL |
|
|
||||||||
|
|
|
|
|
|
|
|
EF |
30 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||
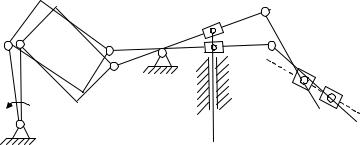
Покажем смещенное положение механизма. Для этого ведущий кривошип OA повернем на небольшой угол (до 15 ) в сторону вращения и, учитывая неизменность длин звеньев механизма и связи, наложенные на него, изобразим новое положение механизма
(рис. 8.4).
Часть 2. Определение скоростей точек и угловых скоростей звеньев механизма с помощью мгновенных центров скоростей.
Начертим снова механизм в заданном положении (см. рис. 8.2), оставив масштаб длин прежним.
61
|
C1 |
|
|
|
|
|
|
|
C |
|
|
K |
E |
|
|
|
|
|
|
|
|
|
|
B |
O1 |
|
E1 |
A1 |
A |
|
1 |
|
|
|
|
|
|
K1 |
F |
||
|
|
D1 |
|
|
||
|
|
B |
|
|
F1 |
|
|
|
|
|
|
||
|
|
|
D |
|
M |
L |
O |
|
|
|
|
||
|
|
|
|
L1 |
||
|
|
|
|
|
||
|
|
|
|
|
M1 |
|
|
|
|
|
|
|
Рис. 8.4
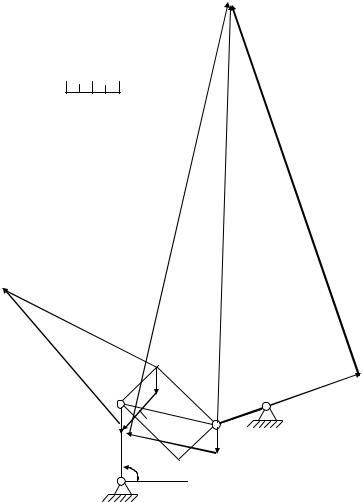
Найдем МЦС пластины ACBD, зная направления скоростей точек A и B (рис. 8.5). Проведя перпендикуляры из этих точек к направлениям v A и v B , в точке их пересечения получим МЦС
пластины – получаем точку P1 . Для вычисления величин скоро-
стей воспользуемся свойством МЦС: скорости точек плоской фигуры прямо пропорциональны расстояниям от этих точек до мгно-
венного |
|
центра |
|
скоростей. |
|
Составим |
отношение |
|||||||
v |
B |
/ v |
A |
P B / P A . Расстояния P A и P B измерим на рис. 8.5 и, |
||||||||||
|
|
1 |
1 |
|
|
|
|
|
1 |
|
1 |
|
||
пользуясь масштабом длин, найдем P1 A 20 см, P1 B 39 см . То- |
||||||||||||||
гда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
P B |
30 |
39 |
59 см/с. |
|
|
|
|
|
|
v |
|
|
1 |
|
|
||||
|
|
|
|
|
B |
A |
P A |
20 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
Пластина вращается в данный момент времени вокруг точки P1 против хода часовой стрелки, что видно из направления скорости точки A . Отложим от точки B в сторону вращения пластины вектор vB в масштабе скоростей на рис. 8.5.
Направления скоростей точек C и D получим, соединив эти точки с точкой P1 и проведя перпендикуляры к отрезкам P1C и P1 D . Направлены они в сторону вращения пластины. Величины скоростей найдем из отношений:
62

|
|
|
|
|
|
|
|
|
v |
C |
|
PC |
|
|
|
|
|
v |
|
|
|
|
|
|
PC |
30 |
39 |
59 |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
, v |
|
|
|
|
|
|
|
1 |
|
|
|
|
см/с, |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
A |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
P A |
|
|
|
|
|
|
|
|
P A |
|
|
|
|
|
|
20 |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
v |
D |
|
|
P D |
|
|
|
|
|
v |
|
|
|
|
|
|
P D |
30 |
22 |
33 |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
, v |
|
|
|
|
|
|
1 |
|
|
|
|
см/с. |
||||||||||||||||||||||||
|
|
|
|
|
|
|
v |
|
|
|
P A |
D |
A |
|
|
|
P A |
20 |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
Масштаб длин |
|
|
|
|
|
|
|
|
|
|
|
Масштаб скоростей |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
10 |
|
|
20 см |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
20 |
|
40 см |
|||||||||||
vC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
E |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
v A A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
v rK |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v D |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v eK |
|
F |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
P1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
90 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v aK |
|
|
|
|
|
|
|
|
L |
||||||||||||||||
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v E |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 8.5 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Рассматривая вращение кривошипа |
|
BO1 E вокруг точки O1 , |
||||||||||||||||||||||||||||||||||||||||||||||||
найдем v E |
и переносную скорость ползуна K . |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
vE |
|
O1E |
, |
|
|
v |
|
|
v |
|
|
O1E |
|
59 |
40 |
118 см/с, |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
E |
B |
|
|
|
|||||||||||||||||||||||||||||||||||||
|
v |
|
|
|
|
|
|
|
O B |
|
|
|
|
|
|
|
O B |
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
ve |
|
|
|
|
O K |
, ve |
|
|
|
|
|
O K |
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
k |
|
|
|
1 |
|
|
|
|
v |
|
|
1 |
|
|
|
|
59 |
|
|
|
|
59 см/с. |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
v |
|
|
|
|
|
|
|
O B |
|
|
|
k |
|
|
|
|
O B |
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
63 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Отложим векторы v E и v ek на рис. 8.5. Абсолютную и относи-
тельную скорости ползуна |
K найдем, построив параллелограмм |
|
скоростей. |
|
|
va 62 см/с, |
vr 20 см/с. |
|
k |
|
k |
Скорость точки M стержня KM , совершающего поступа- |
||
тельное движение, равна абсолютной скорости ползуна K , |
||
v |
M |
va 62 см/с. |
|
k |
|
Скорости точек F и L найдем, рассматривая плоское движение стержня EL . Зная скорость точки E и направление скорости
v F точки F , найдем МЦС стержня EF в точке P2 . В данный момент времени стержень вращается вокруг точки P2 против хода часовой стрелки. Найдем vF и vL из отношений
vF |
|
P2 F |
, |
v |
|
v |
|
|
P2 F |
118 |
50 |
131см/с, |
||||||||||
|
|
|
|
|
F |
E |
|
|
|
|
||||||||||||
v |
|
|
|
|
p E |
|
|
|
|
|
|
P E |
45 |
|
||||||||
E |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
||||||
vL |
|
|
P2 L |
, |
v |
|
|
v |
|
|
|
P2 L |
|
118 |
53 |
140 см/с. |
||||||
|
|
|
|
L |
E |
|
|
|||||||||||||||
v |
|
|
|
|
P E |
|
|
|
P E |
45 |
|
|
||||||||||
E |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
||||||
Все найденные векторы скоростей точек изобразим в масштабе на рис. 8.5.
Угловую скорость плоской фигуры при вращении вокруг ее МЦС можно найти, зная линейную скорость любой ее точки M по
формуле vM / MP , |
где MP – |
расстояние от точки M до |
||||||||||||||
МЦС P плоской фигуры. В результате получим |
||||||||||||||||
|
|
|
|
|
vA |
|
|
30 |
|
1.65 (1/с), |
||||||
|
|
ACBD |
P A |
20 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
BO E |
|
|
|
vB |
|
|
59 |
|
2.9 (1/с), |
|||||
|
|
O1B |
20 |
|
||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0, |
|
|
|
|
|
vE |
|
|
118 |
2.7 (1/с). |
||||
KM |
EL |
|
|
|
|
|||||||||||
|
|
|
|
|
P2 E |
45 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
Численные значения найденных линейных и угловых скоростей занесем в табл. 8.2, 8.3.
Проверим, что проекции скоростей двух точек плоской фигуры на прямую, их соединяющую, равны. Рассмотрим движение пластины ACBD. Из концов векторов v A и vC (см. рис. 8.5) опус-
64
тим перпендикуляры на прямую AC . Из чертежа путем сравнения длин отрезков, изображающих проекции скоростей v A и vC на прямую AC , найдем, что прAC v A прAC vC . Аналогично найдем,
что прBC v B прBC vC |
и т.д. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Часть 3. Определение ускорений точек плоского механизма |
||||||||||||||||||||||
графоаналитическим методом. |
|
|
|
|
|
|
|
|
||||||||||||||
Начертим в заданном положении два звена механизма OABO1 |
||||||||||||||||||||||
(рис. 8.6). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определим ускорение точки A кривошипа OA . |
|
|||||||||||||||||||||
a |
A |
an a , an 2 |
|
|
OA 30 см/с2, |
|
||||||||||||||||
|
|
A |
|
A |
A |
|
|
|
OA |
|
|
|
|
|
|
|
|
|
||||
a |
|
OA |
OA 0, a |
A |
|
an 30 см/с2. |
|
|
||||||||||||||
|
A |
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|||
Изобразим вектор a A |
|
на рис. 8.6 в выбранном масштабе. |
||||||||||||||||||||
Ускорение точки |
B пластины ACBD найдем, выбирая точку |
|||||||||||||||||||||
A за полюс, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
a |
B |
|
a |
A |
an |
|
a , |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
BA |
|
BA |
|
||||
где anBA |
– центростремительное ускорение точки B при вра- |
|||||||||||||||||||||
щении звена AB вокруг полюса A , направленное по AB к центру |
||||||||||||||||||||||
вращения |
A , |
a |
– вращательное ускорение точки B при враще- |
|||||||||||||||||||
|
|
|
|
BA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
нии звена AB вокруг полюса A , перпендикулярное AB . |
|
|||||||||||||||||||||
Учтем, что точка |
B вращается вместе с кривошипом |
BO1 E |
||||||||||||||||||||
вокруг точки O |
. Тогда a |
B |
|
an |
a , где |
a n направлено по |
BO к |
|||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
B |
|
|
B |
|
|
B |
1 |
|||
центру вращения O , а a |
|
– по касательной к траектории точки B , |
||||||||||||||||||||
|
|
|
|
|
1 |
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т.е. по перпендикуляру к BO1 . Следовательно, |
|
|||||||||||||||||||||
|
|
|
|
|
|
an |
|
a a |
A |
an |
a . |
|
||||||||||
|
|
|
|
|
|
B |
|
|
|
|
|
|
B |
|
|
|
|
BA |
BA |
|
||
Вычислим модули векторов |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
an |
2 |
|
|
AB 1.72 |
36 104 см/с2, |
|
|||||||||||
|
|
|
|
|
BA |
|
|
AB |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
an 2 |
|
|
|
|
|
BO 32 20 180 см/с2. |
|
||||||||||
|
|
|
|
|
B |
BO E |
|
|
|
1 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Отложим от точки B (см. рис. 8.6) в масштабе ускорение по- |
||||||||||||||||||||||
люса a A . Из конца вектора a A |
построим вектор anBA , проведя его |
|||||||||||||||||||||
параллельно |
AB . |
Через |
|
|
конец |
|
вектора anBA проводим прямую, |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
65 |
|
|
|
|
|
|
|
перпендикулярную AB , т.е. параллельно a BA . Затем от точки B
отложим вектор a nB , через его конец проведем прямую, перпендикулярную этому вектору, т.е. параллельную касательному ускорению a B , до пересечения с прямой, проведенной через конец вектора anBA . В точке пересечения этих прямых находятся концы векто-
ров a BA и a B , а значит, и a B . Измерением на рис. 8.6 получим
|
|
|
|
|
|
|
|
|
a |
504 см/с2, a |
528 см/с2. |
||||
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
BA |
|
Так как a |
|
|
ACВD |
AB , то |
|
|
|
||||||||
|
|
|
BA |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
ACBD |
a |
|
/ AB 528/ 36 14.7 (1/с2). |
|||||
|
|
|
|
|
|
|
BA |
|
|
|
|
||||
Направления ACBD |
и ACBD совпадают, следовательно, враще- |
||||||||||||||
ние пластины в данный момент времени ускоренное. |
|||||||||||||||
Ускорение точки С определяем, выбирая за полюс точку A . |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
a |
C |
a |
A |
an |
a , |
|
|
|
|
|
|
|
|
|
|
|
|
CA |
CA |
||
где |
|
an |
2 |
|
|
|
AC 1.72 20 57.8 см/с2, |
||||||||
|
|
CA |
|
ACBD |
|
|
|
|
|
|
|
||||
a |
|
ACВD |
AC 14.7 20 294 см/с2. |
||||||||||||
CA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Откладываем от точки C (см. рис. 8.6) вектор a A , из его кон- |
|||||||||||||||
ца – вектор aCAn |
|
, направленный по CA к полюсу A , а из конца век- |
|||||||||||||
тора an |
|
– вектор a , перпендикулярный AC . |
|||||||||||||
CA |
|
|
|
|
|
|
|
CA |
|
|
|
|
|
|
|
66
Масштаб ускорений
0 30 60 см/с
a B
a BA
a B
aС
a |
|
C |
|
|
A |
|
|
O1 |
|
CA |
a A |
|
||
|
|
|
||
|
|
|
n |
|
|
aCAn |
|
a B |
|
|
|
|
||
|
a A |
|
|
B |
|
anBA |
|
|
|
|
|
D |
a A |
|
|
90 |
|
||
|
|
|
|
|
|
O |
|
|
|
Рис. 8.6
67
Замыкающая этого векторного многоугольника есть вектор aC . Измеряя его длину на рисунке и пользуясь масштабом ускоре-
ний, получим аС = 222 см/с2 = 2.2 м/с2.
Все полученные результаты запишем в табл. 8.2, 8.3.
Таблица 8.2
|
Способы |
|
|
|
Линейные скорости точек тела, см/с |
|
|
|
||||||||||||||
|
определения |
|
A |
|
B |
C |
|
D |
|
E |
|
F |
|
K |
|
M |
|
L |
||||
|
По плану |
|
30 |
|
60 |
|
60 |
34 |
120 |
130 |
62 |
|
62 |
|
140 |
|
||||||
|
скоростей |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При помощи |
|
30 |
|
59 |
|
59 |
33 |
118 |
131 |
62 |
|
62 |
|
140 |
|
||||||
|
МЦС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 8.3 |
||||||
|
Способы |
|
|
Угловые скорости |
|
Линейные уско- |
|
|
AB , |
|
||||||||||||
|
определе- |
|
|
|
звеньев, 1/с |
|
|
|
рения точек, м/с2 |
|
|
1/с2 |
|
|||||||||
|
ния |
|
ABC |
|
BE |
|
KM |
|
EL |
|
A |
|
B |
|
C |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
По плану |
|
1.7 |
3 |
|
0 |
|
2.7 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
скоростей |
|
|
|
|
|
|
|
|
|
|
0.3 |
|
5.0 |
|
2.22 |
|
|
14.7 |
|
||
|
При по- |
|
1.65 |
2.9 |
|
0 |
|
2.7 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
мощи |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
МЦС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
68

Учебное издание
Белкин Александр Анатольевич Вохмянин Иван Тимофеевич Егоров Вениамин Валерьевич Краснолуцкий Сергей Леонидович Леманов Вадим Владимирович Юдин Владимир Алексеевич
СБ О Р Н И К И Н Д И В И Д У А Л Ь Н Ы Х З А Д А Н И Й
ПО Т Е О Р Е Т И Ч Е С К О Й М Е Х А Н И К Е
Кинематика
Под редакцией В.А. Юдина и В.В. Леманова
Учебно-методическое пособие
Темплан 2007 г.
Редактор А.В. Тренина
Санитарно-эпидемиологическое заключение № 54.НС.05.953.П.00 6252 .06.06 от 26.06.2006 г.
Подписано к печати 27.06.2007. Формат 60х84 1/16 д.л. Гарнитура Таймс. Бумага офсетная. Ризография.
Объём 2 уч.-изд.л.; 4,5 п.л. Тираж 700 экз. З аказ №
Новосибирский государственный архитектурно-строительный университет (Сибстрин)
630008, Новосибирск, ул. Ленинградская, 113
Отпечатано мастерской оперативной полиграфии НГАСУ (Сибстрин)
69