

2.2. Различные случаи определения положения мгновенного центра скоростей.
а
Рис.
1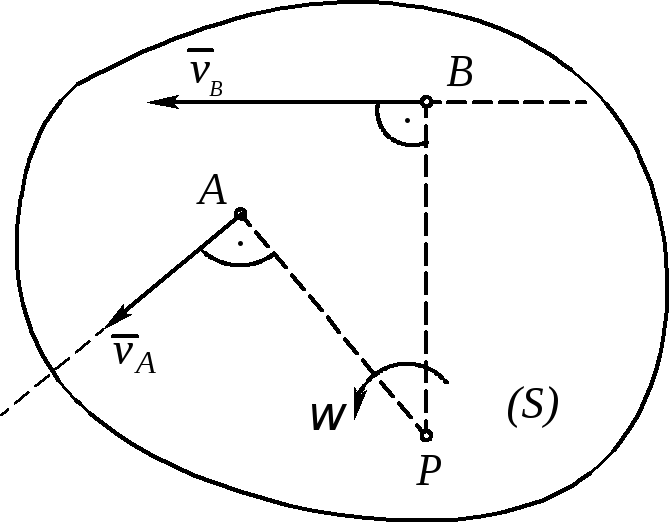
![]() .
.
Модуль скорости точки В можно определить из пропорциональности скоростей точек их расстояниям до мгновенного центра скоростей по формуле:
![]() ,
,
откуда ![]() ,
,
или при помощи угловой скорости фигуры согласно (3):
![]() .
.
Скорость любой другой точки плоской фигуры определяется аналогично.
б) Если скорости точек А и В плоской фигуры параллельны между собой и перпендикулярны к АВ, то для определения положения мгновенного центра скоростей должны быть известны модули скоростей обеих точек А и В (рис. 2, а и б).
Известно, что модули скоростей точек фигуры пропорциональны их расстояниям от мгновенного центра скоростей, т. е.:
![]() .
.
а) б) в) Рис.2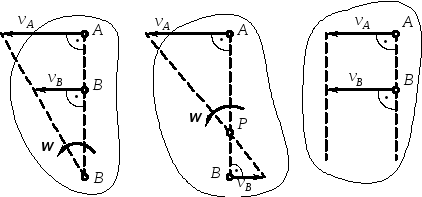
Если скорости точек А и В плоской фигуры равны, параллельны между собой и перпендикулярны к АВ (рис. 2, в)), то мгновенный центр скоростей находится в бесконечности (АР = ∞). Очевидно, что в этом случае:
![]() .
.
в) Если известно, что скорости двух точек А и В плоской фигуры параллельны и не перпендикулярны к АВ (рис. 3), то мгновенный центр скоростей находится в бесконечности (АР = ∞). Очевидно, что и в этом случае:
![]() .
.
Расстояние от всех точек плоской фигуры до мгновенного центра скоростей, в этом случае, равны между собой:
АР = ВР = …= ∞.
Поэтому скорости точек плоской фигуры в рассматриваемый момент геометрически равны:
![]()
г
Рис. 3 Рис. 4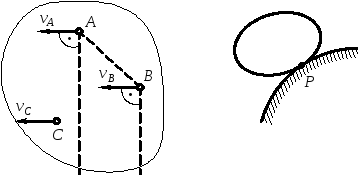
Примеры решения задач
Задача 1. К кривошипу ОА, равномерно вращающемуся с угловой скоростью ОА = 4 с -1, прикреплен шатун АВ, соединенный с коромыслом ВС. ОА = r =0,5 м; АВ = 2r =1,0 м; ВС = r 2, м, ОАВ = 90; АВС = 45. Определить для этого положения механизма скорость точки В шатуна, его угловую скорость, а также скорость точки Д, лежащей на середине шатуна АВ.
Задачу решим двумя способами, основанными на двух различных подходах (см. п. 2.1.).
Рис.
5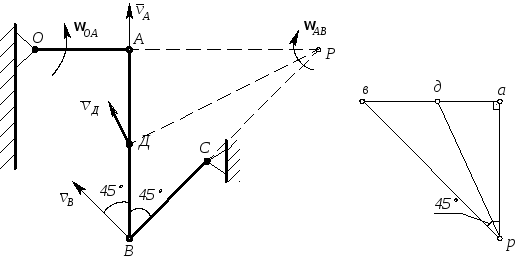
Определяем скорость точки А. vA = OA r = 4· 0,5 = 2 м/с. Так как точка А принадлежит к кривошипу, совершающему вращательное движение, направлен вектор скорости точки А по направлению стрелки OA перпендикулярно к кривошипу ОА,
Из произвольно выбранного полюса, точки Р, откладываем в масштабе вектор скорости точки А (отрезок ра).
Точка В принадлежит двум звеньям механизма: шатуну АВ, совершающему плоское движение и коромыслу ВС, совершающему вращательное движение. Относительно коромысла ВС нам известно направление скорости точки В ( к ВС). Из полюса, точки р проводим линию перпендикулярную к коромыслу ВС.
По теореме о скоростях точек тела:
![]() ,
,

Из точки а плана скоростей проводим линию, перпендикулярную к шатуну АВ. На пересечении с проведенной ранее линией получим точку в плана скоростей. Тогда отрезок вр выразит скорость точки В, а отрезок ав – вращательную скорость шатуна АВ. Так как план скоростей представляет собой прямоугольный равнобедренный треугольник, из него можно легко найти модули искомых скоростей:
![]() м/с,
м/с,
![]() м/с.
м/с.
Угловая
скорость
![]() .
.
Скорость точки Д определим из пропорции в соответствии с ее положением на звене АВ (см. рис. 5). Модуль скорости точки Д равен
![]()
Скорость точки Д на плане скоростей определяется отрезком рд.
Второй способ (основан на понятии мгновенного центра скоростей).
Построим мгновенный центр скоростей звена АВ, восстановив перпендикуляры к скоростям точек А и В. Получим АВР прямоугольный и равнобедренный с углом 45 у основания. Определим стороны треугольника по известным углам и длине катета АВ:
АР = АВ = 2r = 1,0 м,
![]() м.
м.
![]()
Определим угловую скорость звена АВ в его вращательном движении относительно МЦС точки Р. Для этого скорость точки А разделим на расстояние АР:
![]() .
.
Покажем направление АВ стрелкой относительно точки Р.
Определим модуль скорости точки В:
vB = AB BP = 2,0 1,41 = 2,82 м/с.
Направлен вектор скоростей точки В перпендикулярно к ВР по направлению стрелки АВ.
Определим модуль скорости точки Д:
vД = AB ДP = 2,0 1,12 = 2,24 м/с.
Направлен вектор скоростей точки В перпендикулярно к ДР по направлению стрелки АВ.
Сравнение результатов решения задачи двумя способами показывает, что они идентичны.
Проиллюстрируем здесь также применение следствия из теоремы. Для скоростей точек А и В в проекции на звено АВ можно записать
![]()
Откуда
![]()
Данный результат также совпадает с полученным выше решением.
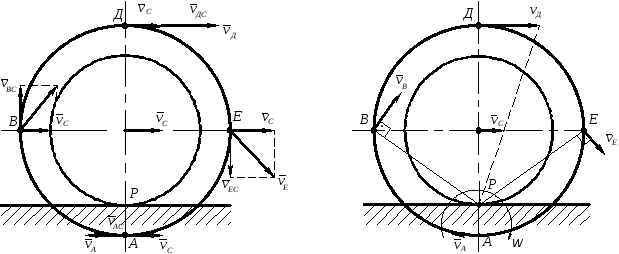
Задача 2. Цилиндр радиусом r = 0,4 м катится по плоскости без скольжения. Скорость точек его оси vc = 0.4 м/с. Диск радиусом R = 0,5 м жестко соединен с цилиндром в сечении, где плоскость не препятствует его движению. Определить угловую скорость системы цилиндр-диск, а также скорости точек А, В, Д, Е, расположенных на двух перпендикулярных диаметрах диска.
Определяем угловую скорость диска как отношение скорости точки С к расстоянию от точки до МЦС (мгновенный центр скоростей находится в точке контакта цилиндра радиусом r с неподвижной поверхностью):
![]() .
.
Далее решаем задачу двумя способами.
Первый способ (основан на теореме о скоростях точек тела).
Скорости
точек А, В,
Д, Е определяем,
как геометрическую сумму скорости
полюса (точки С)
![]() и вращательной скорости каждой из точек
относительно полюса:
и вращательной скорости каждой из точек
относительно полюса:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Так как расстояние от точек А, В, Д, Е до полюса одинаково и равно R, то модули вращательных скоростей будут равны между собой.
![]() .
.
Направлены эти векторы перпендикулярно соответствующим радиусам (см. рис. 6). При сложении составляющих векторов скоростей точек В, Е видим, что они направлены друг к другу под прямым углом. Следовательно, результирующий вектор можно определить по правилу параллелограмма, а его модуль по теореме Пифагора:
![]() ,
,
![]() .
.
Составляющие скоростей точек А и Д лежат на одной прямой, поэтому
модуль результирующего вектора скорости точки можно определить при
алгебраическом их сложении с учетом направления:
![]() ,
,
![]() .
.
Знак «минус» у скорости точки А показывает направление вектора скорости этой точки, по отношению к скорости полюса.
Второй способ (основан на понятии мгновенного центра скоростей).
По направлению скорости точки С относительно МЦС точки Р определяем направление угловой скорости диска. Применение понятия «мгновенный центр скоростей» позволяет рассматривать плоскопараллельное движение твердого тела как мгновенное вращательное относительно оси, проходящей через МЦС. Угловая скорость диска в данной задаче уже определена, необходимо определить расстояния от точек А, В, Д, Е до точки Р (МЦС):
AP = R – r = 0,5 – 0,4 = 0,1 м,
ДP = R + r = 0,5 + 0,4 = 0,9 м,
![]() .
.
Скорости точек по модулю и направлению определяем в соответствии с системой (3):
vA = ω AP = 1,0 0,1 = 0,1 м/c,
vB = ω BP = 1,0 0,64 = 0,64 м/c,
vД = ω ДP = 1,0 0,9 = 0,9 м/c,
v
Рис.
6.
Сравнение результатов решения задачи двумя способами показывает, что они идентичны.