Минобрнауки россии
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Волгоградский государственный технический университет»
Камышинский технологический институт
(филиал)
федерального государственного бюджетного образовательного учреждения высшего профессионального образования
«Волгоградский государственный технический университет»
Белов А.В.
Неумоина Н.Г.
Иващенко А.П.
КИНЕМАТИКА
Методические указания для студентов
заочной формы обучения
Камышин 2011
УДК 531.8 (07)
К 41
Кинематика: Методические указания к практическим занятиям по дисциплине «Теоретическая механика». / Сост. А.В. Белов, Н. Г. Неумоина, А.П.Иващенко; Волгоград, гос. техн. ун-т. – Волгоград, 2011 – 32 с.
Содержит примеры и задания по темам: простое и сложное движение точки, поступательное, вращательное и плоскопараллельное движение твердого тела.
Методические указания подготовлены в соответствии с рабочей программой по дисциплине «Теоретическая механика» и предназначены в помощь студентам очной, очно-заочной и заочной форм обучения, обучающимся по направлениям: 151900.62, 261100.62, 140400.62.
Ил. 8. Табл. 5. Прил. 4. Библиогр.: 3 назв.
Рецензент: к.т.н., доцент,
заведующий кафедрой Шеин А.А.
Печатается по решению редакционно-издательского совета
Волгоградского государственного технического университета
-
© Волгоградский
государственный
технический
университет 2011
Задание к-1. Определение скорости и ускорения точки по заданным уравнениям ее движения
По заданным уравнения движения точки М установить вид ее траектории и для момента времени t = t1 (c) найти положение токи на траектории, ее скорость, полное, касательное и нормальное ускорения, а также радиус кривизны в соответствующей точке.
Необходимые исходные данные приведены в Приложении 1.
Пример выполнения задания
Исходные данные:

![]() (cм)
(cм)
![]() (см) (1)
(см) (1)
t1 =1 c.
Решение
Определяем уравнение траектории точки, исключив параметр времени «t» из уравнений ее движения. Для этого разделим левые части уравнений системы (1) на постоянные множители правой части и возведем каждый член уравнения в квадрат.
![]()

![]() (2)
(2)
Сложив почленно уравнения системы (2) и воспользовавшись основным тригонометрическим тождеством, получим
![]() .
.
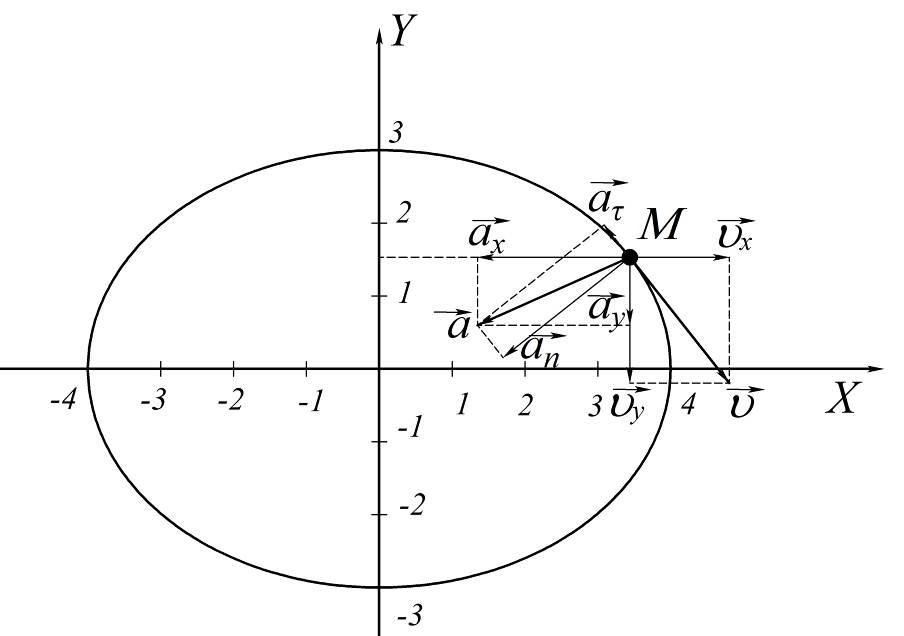
Данное уравнение является каноническим уравнением эллипса с полуосями: по оси x=4и по осиy=3. Подставив времяt1 =1 c в уравнения движения (1) получим координаты точки на траектории движения:x=3,44см; y=1,50 см.
Определяем проекции вектора скорости на оси координат как первые производные от уравнений движения точки
![]()
 см/с,
см/с,
![]() см/с.
см/с.
Определяем проекции вектора ускорения точки как первые производные от проекций вектора скорости или вторые производные от уравнений движения точки
![]()
 ,
,
![]() .
.
Определяем модули векторов скорости и ускорения точки в заданный момент времени
![]() ,
,
![]() .
.
На рисунке показываем траекторию движения точки М, ее положение в заданный момент времени, а также проекции векторов и вектора скорости и ускорения точки.
Определяем касательное ускорение точки
![]()
Определяем нормальное ускорение точки
![]() .
.
Определяем радиус кривизны траектории точки
![]() .
.
Ответы заносим в таблицу. Радиус кривизны
траектории движения точки и ее координаты
– в
![]() ,
скорость – в
,
скорость – в![]() ,
ускорение – в
,
ускорение – в![]() .
.
Таблица 1
|
|
|
|
|
|
|
|
|
|
|
|
|
3,44 |
1,50 |
2,10 |
-2,72 |
3,42 |
-3,33 |
-1,65 |
3,62 |
-0,74 |
3,54 |
3,30 |
|
|
|
Рис.1 |