

Студеникин - Технические средства судовождения
.pdfОсобенностью двухстепенных гироскопов является то, что, будучи лишенны- ми одной степени свободы, их роторы должны поворачиваться вокруг зафиксиро-
|
|
|
ванной оси совместно с основанием, на кото- |
|
с |
|
Мс |
ром прибор установлен. Допустим, что с по- |
|
Мг |
|
мощью винта dc (рис. 3.6) мы зафиксировали |
||
|
|
|||
ω |
||||
наружное кольцо НК карданова подвеса. То- |
||||
|
|
|
||
|
|
|
гда при повороте судна вокруг наружной оси |
|
Н |
|
|
ОС с некоторой угловой скоростью ω, с пози- |
|
|
|
ции уже рассмотренных ранее свойств, гиро- |
||
|
|
|
скоп будет воспринимать этот поворот как |
|
|
|
|
действие некоторого внешнего момента Мс, |
|
|
|
|
направление которого совпадает с направле- |
|
|
|
|
нием вектора угловой скорости поворота суд- |
|
|
|
|
на. Под действием этого момента он начнет |
|
|
|
|
прецессировать вокруг оси ОВ таким образом, |
|
Рис. 3.6 |
|
|
чтобы кратчайшим путем совместить свой |
|
|
|
вектор Н кинетического момента с вектором |
||
|
|
|
||
момента Мс или, что то же самое, с вектором ω угловой скорости вращения основания. Таким образом, можно считать, что гироскоп реагирует на угловую скорость вращения основания вокруг зафиксированной оси ОС, совершая прецессию вокруг свободной оси ОВ. Ось ОС в такого типа приборах называют
осью чувствительности или измерительной осью, в то время как ось ОВ – осью прецессии.
Это же поведение можно объяснить и иначе. При повороте судна гироскоп со- вершает вынужденное вращение совместно со своим основанием, в результате чего возникает гироскопический момент Мг вокруг оси ОВ, который и приводит к появ- лению описанной выше прецессии. Учитывая это, можно сформулировать следую- щее правило прецессии:
При наличии вращения основания двухстепенного гироскопа вокруг его оси чувствительности гироскоп начнет прецессировать таким образом, чтобы кратчайшим путем совместить вектор своего кинетического момента с вектором угловой скорости вращения основания.
Ротор гироскопа может быть подвешен не только в наружном кардановом под- весе, как это было рассмотрено выше, но и во внутреннем. При этом, как правило, используется упругий карданов подвес. Рассмотрим кинематическую схему и свой-
ства указанного прибора, который на практике получил название динамически на-
страиваемого гироскопа.
3.7. Динамически настраиваемый гироскоп
Ранее были рассмотрены свойства гироскопов, построенных по классической схеме, предусматривающей установку ротора во внешнем кардановом подвесе, имеющим опоры с минимальным моментом сил сухого трения. На практике же существуют и другие варианты подвеса ротора гироскопа, которые имеют свои особенности и область применения. Один из таких вариантов использован в ди- намически настраиваемом гироскопе (ДНГ).
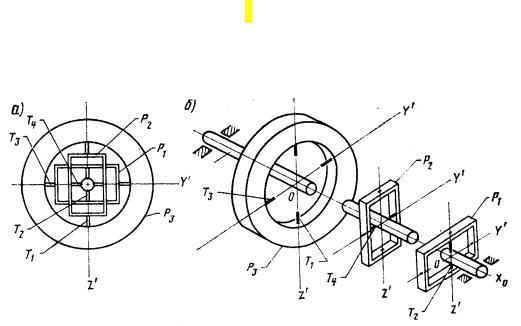
Ротор Р3 ДНГ (рис. 3.7) [23, 24], устанавливается в упругом внутреннем карда- новом подвесе, включающем в себя два кольца Р1 и Р2, связанных с ним с помощью четырех торсионов Т1 – Т4, имеющих высокую жесткость при изгибе и определен-
В
Рис. 3.7
ную, заранее заданную жесткость при закручивании. Благодаря торсионам ротор может поворачиваться на ограниченные углы вокруг осей оу’ и oz’. Кольца подвеса в нерабочем состоянии располагаются практически в одной плоскости.
Ротор совместно с системой его подвеса приводится во вращение с угловой скоростью Ω с помощью внешнего двигателя (на рис. не показан), связанного с ва- лом В, ось которого совпадает с осью ох0.
Уравнения, описывающие работу такого гироскопа, совпадают с уравнениями иде- ального гироскопа в кардановом подвесе [23,24]. Это значит, что основные свойства динамически настраиваемого гироскопа аналогичны ранее рассмотренным свойст- вам гироскопа с тремя степенями свободы. Следует указать на тот факт, что при
надлежащем выборе скорости вращения ротора моменты сил упругости торсионов компенсируются динамическими моментами рамок карданового подвеса, в резуль- тате чего практически исключается влияние торсионов на качество работы гироско-
па. Выбор указанной скорости называют динамической настройкой гироскопа, а сам гироскоп – динамически настраиваемым.
Динамически настраиваемые гироскопы в последнее время уверенно вытесняют в различных сферах применения классические гироскопы в кардановом подвесе, а также поплавковые гироскопы. Последние модели гирокомпасов, пользующиеся высоким спросом, как в нашей стране, так и за рубежом были построены на базе именно таких гироскопических датчиков. Это обусловлено тем, что рассматривае- мые гироскопы за счет особенностей своей конструкции в меньшей степени под- вержены влиянию внешних возмущающих факторов, имеют лучшие по сравнению с классическими моделями массогабаритные характеристики, отличаются высокой стабильностью выходных параметров.
3.8. Принцип действия волнового твердотельного гироскопа
Существуют варианты построения безроторных гироскопов, способных обеспе- чивать измерение параметров движения объектов, на которых они работают. Наи- более перспективным из них в настоящее время считается волновой твердотель- ный гироскоп (ВТГ). Приборы указанного типа интенсивно разрабатываются многими научными коллективами как в России, так и за рубежом. В своем докла- де [22] академик В.Г. Пешехонов отметил: “Можно ожидать, что в следующем десятилетии будут реализованы потенциальные возможности ВТГ – устойчи- вость к внешним воздействиям, высокая точность (10-3 град/час), высокая на- дежность и возможность автоматизированного серийного производства, и это позволит новому типу гироскопа вытеснить в ряде применений не только ЛГ (ла- зерные гироскопы), но и некоторые другие типы гироскопов. Первый практиче- ский успех уже достигнут. Фирмой Delko (ныне подразделение фирмы Litton) создан интегрирующий ВТГ с высокими точностными характеристиками.” К
указанным в приведенной цитате достоинствам рассматриваемого прибора следу- ет добавить [17] малое потребление энергии, конструктивную простоту механиче- ских узлов, устойчивость к прерыванию электропитания, малое время готовности, широкий диапазон рабочих температур, устойчивость к воздействиям ионизи- рующего излучения, малую чувствительность к линейным перегрузкам, большой срок службы.
Принцип действия ВТГ основан на инертности упругих волн, возбуждаемых в кольцевом, цилиндрическом или полусферическом резонаторах, при его вращении
|
y |
|
|
|
y |
V1 |
|
вокруг |
оси |
симметрии. |
|||
а) |
|
б) |
W1 |
|
Впервые в 1890 г. это явле- |
||||||||
1 |
|
|
|
||||||||||
|
|
f1 |
|
ние обнаружил и исследовал |
|||||||||
|
|
2 |
W7 |
|
|
|
|||||||
8 |
|
|
|
f3 |
|
английский |
|
ученый |
G. |
||||
|
|
|
|
|
|
|
Bryan. |
Исследуя |
природу |
||||
7 |
|
3 |
|
V7 |
|
V3 |
|
||||||
|
|
|
|
звуковых |
биений |
вибри- |
|||||||
|
x |
|
|
|
|||||||||
о |
|
|
|
о |
|
x |
|||||||
|
|
|
|
рующей оболочки |
(рюмки) |
||||||||
|
|
4 |
f7 |
|
Ω |
W3 |
|
||||||
6 |
|
|
|
при вращении ее вокруг оси |
|||||||||
|
|
|
|
|
|||||||||
|
5 |
|
|
f5 |
|
W5 |
|
симметрии, |
он установил, |
||||
|
|
|
|
|
что в |
результате |
действия |
||||||
Рис. 3.8 |
|
|
|
|
V5 |
|
|||||||
|
|
|
|
|
|
|
кориолисовых |
сил |
инерции |
||||
|
|
|
|
|
|
|
|
||||||
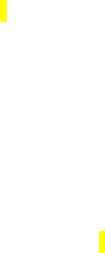
происходит прецессия стоячей волны как относительно оболочки, так и в инерци- альном пространстве. Физическую сущность указанного явления можно пояснить следующим образом. Допустим [17], что в кольцевом резонаторе (рис. 3.8 а) возбу- ждены колебания, имеющие форму стоячей волны, пучности которой находятся в точках 1,3,5 и 7, а узлы в точках 2,4,6, и 8. При вращении полусферы вокруг оси симметрии с угловой скоростью Ω точки 1,3,5 и 7 (рис. 3.8 б) совершают сложное
движение, состоящее из относительного - со скоростями V1, V3, V5 и V7 и перенос- |
|||
ного – с угловой скоростью Ω. В результате возникают кориолисовы ускорения W1, |
|||
|
|
θ(t) |
W3, W5 и W7 элементов резонатора, расположенных в |
Ω |
|
точках пучностей. Силы инерции f1, f3, f5 и f7, порож- |
|
|
|
||
|
|
даемые этими ускорениями, будут направлены в сто- |
|
|
|
|
|
|
|
|
роны, противоположные ускорениям, и образовывать |
|
|
|
два противоположно направленных момента кориоли- |
|
|
|
совых сил, величина которых зависит от угловой ско- |
|
|
|
рости Ω и амплитуды вибрации резонатора. Результи- |
Рис. 3.9 |
|
|
рующий момент названных сил вызывает указанную |
|
|
выше прецессию стоячей волны относительно резона- |
|
|
|
|
|
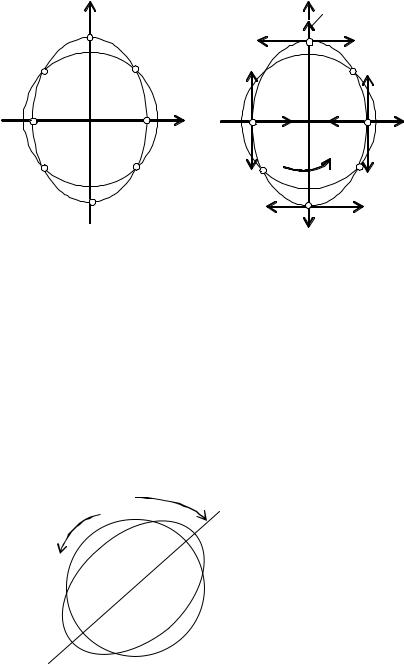
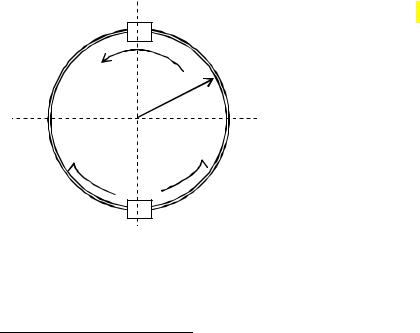
тора и в инерциальном пространстве. В зависимости от способа возбуждения стоя- чей волны угол прецессии θ(t) (рис. 3.9) оказывается пропорциональным или угло- вой скорости вращения основания прибора, или углу его поворота. В первом случае прибор относится к измерителям угловой скорости (датчикам угловой скорости ВТГ-ДУС), а во втором – к измерителям угла поворота основания (интегрирующим гироскопам ВТГ-ИГ). Возбуждение указанных колебаний осуществляется с помо- щью емкостных, электромагнитных или пьезоэлектрических датчиков. В первых двух случаях между резонатором и электродами датчиков имеются рабочие зазоры,
в последнем – датчики монтируются на самом цилиндре. Применение пьезоэлектри-
ческих датчиков существенно упрощает конструкцию прибора и позволяет получить большие выходные сигналы.
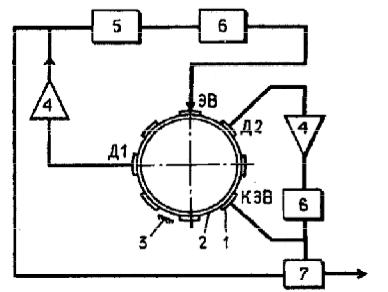
В приборах типа ВТГ-ДУС используется позиционное возбуждение колебаний резонатора. Один из возможных вариантов реализации схемы, обеспечивающей такое возбуждение, представлен на рис. 3.10 [17]. Возбуждающая сила, прило- женная к кромке резонатора 2 со стороны двух диаметрально противоположных электродов возбуждения ЭВ, порождает описанную выше стоячую волну, изме- няющуюся с частотой, равной собственной частоте резонатора. Для обеспечения точной настройки системы используется напряжение, снимаемое с дифференци- ального датчика Д1, которое управляет работой автогенератора, включающего в себя предварительный усилитель 4, схему стабилизации амплитуды и фазовой синхронизации 5, широкополосный фильтр 6 и электрод ЭВ. В случае отсутствия вращения прибора вокруг оси чувствительности стоячая волна имеет неподвиж- ные узлы, расположенные под парами электродов Д2 и КЭВ. Электроды Д2 ис- пользуются для измерения амплитуды колебаний резонатора в точках, с которыми
они связаны, а электроды КЭВ – для компенсации этих колебаний.
При наличии вращения прибора вокруг оси чувствительности с не- которой угловой скоростью Ω, как это показано, например, в [17],
угол θ поворота стоячей волны относительно резонатора опреде- ляется следующим выражением:
θ = 2K |
Ω |
, |
(3.16) |
2 |
|||
|
ω0ξ |
|
|
где К – коэффициент пропорцио- нальности, равный примерно 0,3; ω0 – частота стоячей волны; ξ – коэффициент затухания колебаний. Указанная зави-
симость обусловлена тем, что ЭВ препятствуют повороту оси эллипса вибрации ре- зонатора и это противодействие становится тем сильнее, чем сильнее отклоняется указанная ось от оси ЭВ. В свою очередь, кориолисовы силы инерции, заставляю- щие прецессировать волну вокруг оси симметрии вибратора, пропорциональны уг- ловой скорости Ω поворота основания прибора вокруг этой оси. Угол θ будет опре- деляться равенством отклоняющего и препятствующего воздействий и, следова- тельно, будет пропорционален скорости Ω.
При наличии угла θ узлы стоячей волны также переместятся в новое положение и в местах расположения электродов Д2 и КЭВ будут наблюдаться колебания, амплиту- да которых определяется углом θ. С целью измерения значения угла θ достаточно вычислить отношение амплитуд w1 и w2 колебаний резонатора в местах расположе- ния электродов Д1 и Д2 и подставить результат в следующее равенство [17]:
θ = 0,5arctg |
ϖ2 . |
(3.17) |
|
ϖ1 |
|
К другим способам измерения угла θ можно отнести компенсационный, кото- рый использован в схеме, представленной на рис. 3.10. В данном способе с помо- щью датчика Д2 измеряется амплитуда колебаний резонатора, и его сигнал после предварительного усиления в усилителе 4 и преобразования в широкополосном фильтре 6 поступает на компенсационный электрод возбуждения КЭВ, который уст- раняет колебания, порождаемые угловой скоростью вращения основания гироскопа. Компенсационное напряжение, снимаемое на выходе демодулятора 7, пропорцио- нально входной угловой скорости. Максимальная точность, достигнутая при испы- тании ВТГ-ДУС рассматриваемого класса, составила 0,01 град/с [17].
С целью построения ВТГ-ИГ используется параметрическое возбуждение колеба- ний резонатора с помощью кольцевого электрода, ок-
|
|
|
|
ружающего его кромку (рис. 3.11). Поверхности резо- |
|
|
|
|
|
||
|
|
|
|
натора 2 и кольцевого электрода 1 можно рассматри- |
|
|
|
|
|
вать, как обкладки цилиндрического конденсатора, к |
|
|
|
~U |
|||
|
|
которым приложено напряжение, с частотой, близкой |
|||
2 |
|
к собственной частоте резонатора (примерно 2500 Гц). |
|||
|
|||||
1 |
|
|
|
Возбуждение колебаний происходит за счет того, что |
|
|
|
|
|||
|
|
|
|
при любой вариации зазора между обкладками кон- |
|
Рис. 3.11 |
|||||
денсатора силы притяжения, действующие на них при |
|||||
|
|
|
|
наличии напряжения ~U, будут большими там, где за- |
|
зор меньше, и меньшими там, где этот зазор больше. При вращении основания вокруг оси симметрии резонатора, как и в предыдущем случае, будет иметь место инерционное смещение стоячей волны вокруг этой оси. В силу того, что при ис- пользовании кольцевого электрода силы, препятствующие этому смещению со стороны системы возбуждения стоячей волны, отсутствуют, скорость поворота осей стоячей волны будет пропорциональна угловой скорости поворота основа- ния прибора:
θ& = −КΩ, |
(3.18) |
а ее угол поворота относительно резонатора
θ =θ0 − К ò Ω(τ )dτ =θ0 − Кϕ, |
(3.19) |
где К – коэффициент пропорциональности, слабо зависящий от параметров резо- натора, φ – угол поворота основания.
Как видим, в рассматриваемом случае угол поворота стоячей волны оказывается пропорциональным интегралу от угловой скорости поворота основания прибора, что и позволило считать гироскоп интегрирующим.
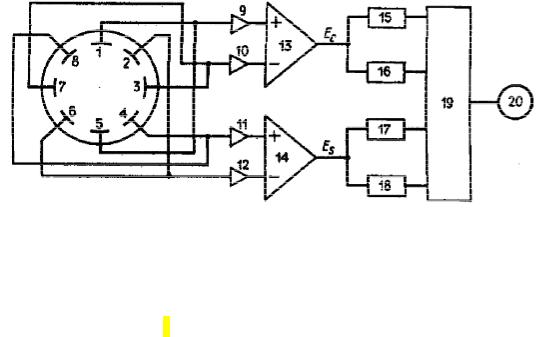
Для съема информации с прибора [15] используются восемь датчиков линейных перемещений (рис. 3.12), аналогичных тем, которые использовались в ВТГ-ДУС.
Рис. 3.12
Каждый электрод электрически связан с диаметрально противоположным элек- тродом.
Закон изменения амплитуды w(φ,t) вибрации резонатора может быть представлен в следующем виде [17]:
ϖ(ϕ,t) = (acosωt + msinωt)cos2ϕ +(bcosωt +nsinωt)sin2ϕ, |
(3.20) |
где а и т – амплитуды колебаний резонатора вдоль осей электродов 1 – 5 и 3 – 7, соответственно; b и п – амплитуды колебаний вдоль осей электродов 2 – 6 и 4 – 8; ω – частота возбуждаемых колебаний. Параметры а, b, т и п определяются путем фазового детектирования сигналов датчиков с использованием опорного напря- жения, изменяющегося с частотой ω. Для этого указанные сигналы усиливаются предварительными 9 –12 и операционными 13, 14 усилителями и поступают на входы фазных 15 – 17 и квадратурных 16 – 18 демодуляторов. Выходные сигналы демодуляторов, пропорциональные искомым амплитудам колебаний, преобразу- ются в цифровую форму в аналого – цифровом преобразователе 19 и поступают в вычислитель 20, который и рассчитывает текущее значение угла поворота осно- вания прибора. Для этого используется несложное равенство, связывающее иско- мую величину с измеренными параметрами [29]:
θ = |
1 |
arctg |
|
|
b2 + n2 |
|
|
. |
(3.21) |
||
2 |
|
|
|
|
|
|
|||||
a2 |
+ m2 |
||||||||||
|
|
|
|
|
|
||||||
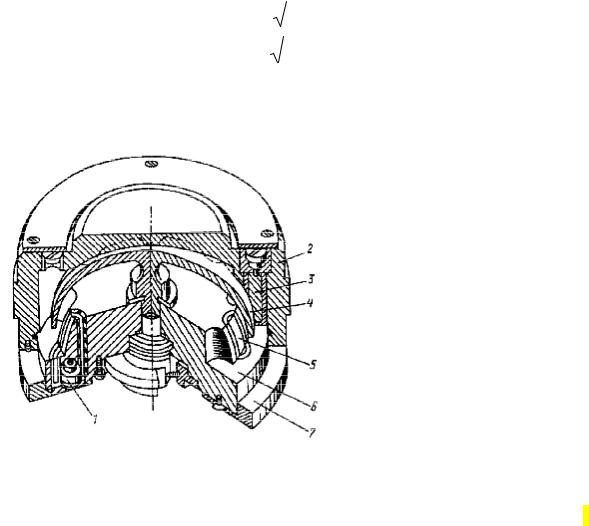
Как уже отмечалось выше, конструкция ВТГ отличается относительной простотой и технологичностью. В качестве примера на рис. 3.13 представлена конструктивная
|
схема ВТГ – ДУС, построенная на |
|||||
|
базе полусферического резонатора 4, |
|||||
|
жестко |
связанного |
с |
внутренним |
||
|
корпусом 6. На этом же корпусе |
|||||
|
располагаются электроды возбужде- |
|||||
|
ния |
5. |
Измерительные |
электроды |
||
|
(датчики перемещений) 3 размеща- |
|||||
|
ются на наружном корпусе 2. Для |
|||||
|
снабжения системы электропитани- |
|||||
|
ем |
используются |
герметические |
|||
|
вводы 1. Для уменьшения демпфи- |
|||||
|
рования |
колебаний |
резонатора на |
|||
Рис. 3.13 |
внутреннем и наружном корпусах |
|||||
прибора |
между электродами выбра- |
|||||
|
||||||
ны специальные пазы.
Конструктивная схема ВТГ – ИГ аналогична рассмотренной схеме[17,24]..
Основные погрешности ВТГ обусловлены несовершенством резонатора. В ра- боте [12] показано, что наиболее существенное влияние на поведение стоячих волн
в резонаторе ВТГ оказывает четвертая гармоника разложения Фурье распределения неоднородностей таких параметров, как плотность, модуль Юнга, толщина оболоч- ки. Наличие этой гармоники приводит к появлению в резонаторе системы двух соб- ственных осей, развернутых между собой на угол, равный 450, таких, что собствен- ные частоты колебаний резонатора вдоль каждой их этих осей оказываются отлич- ными друг от друга на некоторую величину , называемую расщеплением собст- венной частоты. Собственная ось, относительно которой частота колебаний меньше называется тяжелой или осью меньшей жесткости. В свою очередь, другая собст- венная ось, частота колебаний вдоль которой больше на величину расщепления час-
тоты, называется легкой или осью большей жесткости.
Наличие расщепления собственной частоты приводит к прецессии стоячей волны даже при отсутствии вращения основания прибора. С целью снижения скорости дрейфа волны необходимо снижать значение расщепления путем повышения каче- ства балансировки резонатора.
Определенное влияние на работу гироскопа оказывает добротность резонатора и степень ее постоянства в пределах вибрирующей поверхности. Названная доброт- ность определяется отношением частоты собственных колебаний резонатора к ко- эффициенту их затухания и характеризует потери энергии, которые имеют место в системе. Степень добротности системы оказывает влияние на порог чувствительно- сти ВТГ, так как при малых угловых скоростях вращения основания приводит к яв- лению “захвата” волны, в результате чего не происходит ее перемещения относи- тельно резонатора. Компенсация скорости ухода, вызванной рассматриваемым фак- тором, представляет собой сложную задачу в связи с тем, что сама добротность яв- ляется нестабильным параметром.
Имеются еще ряд источников погрешности ВТГ, которые рассматриваются в специ- альной литературе.2.17. Общая характеристика оптических гироскопов
Наряду с рассмотренными механическими гироскопами на практике все более широкое применение находят оптические гироскопы, чувствительный элемент ко- торых не содержит в себе подвижных частей. К числу факторов, способствующих развитию оптической гироскопии, следует отнести стремление упростить и удеше- вить конструкцию приборов, повысить их надежность и ресурс, снизить объем и массу приборов, сократить время подготовки изделий к работе, перевести производ- ство приборов на передовую промышленную технологию.
Принцип действия приборов основан на эффекте Саньяка, сущность которого состоит в том, что разность фаз двух лучей, обегающих замкнутый контур в проти- воположных направлениях при вращении контура вокруг оси, перпендикулярной его плоскости, пропорциональна угловой скорости вращения этого контура. Идея возможности существования этого эффекта впервые была высказана О. Лоджем в 1893 г [1]. Первые эксперименты по обнаружению указанного фазового сдвига были проведены Ф. Гаррессом в 1909-1911 гг на призменном кольцевом интерферометре диаметром 40 см, угловая скорость вращения которого составляла 600 об/мин. Це-
ленаправленные эксперименты по измерению влияния вращения на разность фаз встречных волн впервые были проведены в 1913 г. Ж. Саньяком, имя которого при- своено обнаруженному эффекту. В экспериментах был использован зеркальный кольцевой интерферометр размером 0,5 м при скорости вращения 50-140 об/мин. Он
же первым предложил использовать обнаруженный эффект для целей гироскопии и навигации. Опыт по обнаружению вращения Земли с помощью эффекта Саньяка впервые осуществили в 1925 г. А. Майкельсон, Г. Гэль и Ф. Пирсон [1].
Развитие оптической гироскопии пошло в двух основных направлениях:
∙активный вариант, простроенный на базе кольцевого лазера, в котором
вращение приводит к появлению разности частот генерации встречных волн;
∙пассивный вариант, построенный на базе волоконного кольцевого интер- ферометра.
Каждый из указанных вариантов имеет право на жизнь, хотя в последнее время большее внимание уделяется разработке и производству волоконно-оптических ги- роскопов (ВОГ). Теоретические исследования, направленные на создание оптиче- ской гироскопии и длившиеся около 30 лет, в основных чертах к настоящему време- ни завершены. Сейчас основная работа перешла в стадию производства, однако ак- туальными остаются задачи повышения предельной чувствительности и стабильно- сти оптических гироскопов, а также их миниатюризации и снижения стоимости.
Многие образцы серийно выпускаемых у нас и за рубежом оптических гироскопов нашли применение в различных системах навигации и управления подвижными объектами, из которых они успешно вытесняют механические гироскопы средней и низкой точности.
Рассмотрим принцип действия отдельных видов оптических гироскопов. |
|||
3.9. Принцип действия кольцевого лазерного гироскопа |
|||
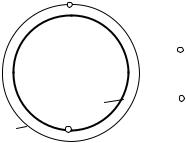
Как уже было отмечено, в основе КЛГ лежит эффект Саньяка, связывающий уг- |
|||
ловую скорость вращения его основания с изменением частоты световых волн, обе- |
|||
|
|
|
гающих замкнутый контур в противоположных |
|
ПС |
|
направлениях [4]. Так, если предположить, что |
|
|
|
контур имеет кольцевую форму и снабжен источ- |
|
ω |
|
ником света Л (рис. 3.14), излучающим два коге- |
|
|
R |
рентных световых луча, распространяющихся в |
|
|
контуре в противоположных направлениях, то в |
|
|
|
|
|
|
|
|
силу того, что скорость света не зависит от пара- |
1 |
2 |
|
метров вращения контура вокруг оси, перпенди- |
|
Л |
|
кулярной его плоскости, время движения лучей от |
Рис. 3.14 |
|
|
|
|
|
источника Л до приемника сигнала ПС будет оп- |
|
ределяться длиной пути, который луч должен пройти. |
|||
Представим каждый световой луч гармонической функцией
Имеющих нулевой или постоянный во времени относительный сдвиг фаз колебаний.