

Студеникин - Технические средства судовождения
.pdfИНЕРЦИАЛЬНЫЕ ДАТЧИКИ |
Раздел |
ИНФОРМАЦИИ |
3 |
|
ВВЕДЕНИЕ К РАЗДЕЛУ
Выступая на заседании научной сессии Российской академии наук, посвящен- ной 85-летию академика РАН А. Ю. Ишлинского руководитель Центрального науч- но – исследовательского института “Электроприбор” профессор В. Г. Пешехонов сказал [22]: “Завершающийся ХХ век отмечен многими выдающимися
достижениями в области технических наук. Его по праву называют веком атомной физики, веком авиакосмической техники, веком информатики. Мне кажется, что не будет большим преувеличением назвать его и веком гироскопии, веком автономной навигации и ориентации”. Очевидно, что с этим трудно не согласиться.
Впервые потребность применения гироскопических приборов возникла в конце ХIX, начале ХХ веков на военных кораблях, имеющих механические движители и элементы конструкции, выполненные из ферромагнитных материалов, которые су- щественно искажали на судне магнитное поле Земли. В этих условиях работа маг- нитных компасов стала неудовлетворительной. Именно гирокомпас решил пробле- мы курсоуказания, а гировертикаль и гироскоп направления позволили существенно повысить точность стрельбы. В нашей стране развитие гироскопической техники началось в тридцатые годы и стало особенно интенсивным с конца пятидесятых го- дов. В настоящее время гироскопические системы являются основой всех систем управления, стабилизации и ориентации подвижных объектов.
Эти системы представляют собой сложные электромеханические или электрон- ные изделия, использующие последние достижения в области науки и технологии. Они постоянно и достаточно интенсивно совершенствуются, расширяются их функ- циональные возможности, улучшаются технические характеристики, упрощается
эксплуатация за счет высокого уровня автоматизации рутинных и вычислительных операций. В свою очередь, высокий уровень развития вычислительной техники по- зволил объединить различные по принципу действия источники навигационной ин- формации в единые интегрированные системы, обладающие еще более высокими техническими и эксплуатационными характеристиками.
Данный раздел посвящен изложению основ теории работы инерциальных датчи- ков навигационной информации, используемых в современных системах навигации и ориентации, а также их устройства и правил эксплуатации.
3.1.Определение понятия “гироскоп”
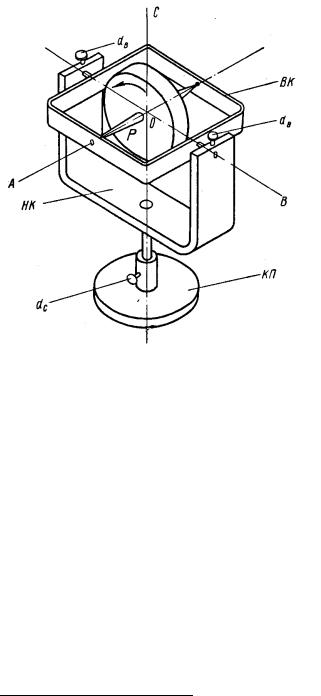
В1852 году известный физик Л. Фуко (1819 – 1868) осуществил подвес массив-
ного ротора Р (рис. 3.1) [19] , свободно вращающегося вокруг так называемой глав- ной оси подвеса ОА, в кардановых кольцах ВК и НК.
В свою очередь, наружное карданово кольцо НК, устанавливалось на основании КП прибора с помощью двух опор, рас- положенных по оси ОС, обеспечивая сво- боду вращения ротора Р вместе с карда- новыми кольцами вокруг этой оси подве- са.
Прибор Фуко позволял по отклоне-
нию главной оси АА от земных ориентиров судить о вращении Земли. Он давал воз- можность «видеть» земное вращение, по- чему и был назван «гироскопом», т. е. прибором, позволяющим наблюдать вра- щение .
Рис.3.1
Одновременно были выявлены и
другие столь же замечательные свойства гироскопа. Так, затяжка винтов dв, расположенных на наружном кольце НК подвеса (рис. 3.1), лишала гироскоп свободы вращения вокруг оси 0В и создавала условия, при которых он стремился совместить свою главную ось ОА с плоскостью меридиа- на, что позволяло определить ее положение в данном пункте земной поверхности.
При затягивании стопорного винта dс на корпусе прибора гироскоп лишается свободы вращения вокруг оси ОС. В этом случае при определенных условиях его главная ось ОА стремится совместиться с направлением, параллельным земной оси, что позволяет использовать гироскоп для определения географической широты вы- бранной точки земной поверхности.
Слово «гироскоп» происходит от двух греческих слов: гирос — вращение и скопейн смотреть.
3.2. Основные свойства классических гироскопов
Общее представление об основных свойствах гироскопов можно получить, используя теорему о кинетическом моменте. Эта теорема фактически является фор- мулировкой первого закона И. Ньютона для вращательного движения. Действитель- но, названный закон аналитически можно представить в следующем виде:
mV& |
= |
|
, |
(3.1) |
|
|
||
F |
||||||||
где m – масса движущегося линейно тела, |
|
|
|
|
|
|||
V |
– скорость его движения, F – сила, |
|||||||
приложенная к телу. Физический смысл этого закона заключается в том, что изме- нение вектора скорости движущегося тела происходит только в том случае, если на него действует какая-либо приложенная извне сила.
Используя выражение (3.1) и аналогии между параметрами, характеризующи- ми поступательное и вращательное движение, запишем:
& |
(3.2) |
I0Ω = M , |
где I0 – момент инерции тела относительно оси вращения, Ω– угловая скорость вращения тела, М - вектор момента внешней силы, приложенный к телу. Равенство (3.2) представляет собой математическую формулировку теоремы о кинетическом моменте вращающегося тела. Если учесть, что
I0 |
|
= |
|
, |
(3.3) |
Ω |
H |
где Н – вектор кинетического момента этого тела, то выражение (3.2) можно пере- писать в виде:
|
|
|
|
|
|
|
dH |
& |
|
|
|
|
|
|
|
|
|
|||
|
= H = M . |
(3.4) |
||||
dt |
||||||
Принимая во внимание, что & определяет скорость конца вектора кинетического
Н
момента, т.е. изменение этого вектора по модулю и направлению, можно утвер- ждать, что это изменение имеет место лишь в том случае, если на тело действует
|
|
|
& |
= 0 и кинетиче- |
|
момент внешней силы. Действительно, если М = 0 |
|||||
, то вектор Н |
|||||
ский момент гироскопа остается неизменным как по величине, так и по направле- нию.

Гироскоп, на ротор которого не действуют никакие моменты внешних сил, называют свободным. Учитывая это, можно сформулировать первое свойство гироскопов – свободный гироскоп сохраняет ось вращения своего ротора (главную ось) неизменно ориентированной в пространстве.Это свойство имеет большое практическое значение, так как из него вытекает возможность построения на борту подвижного объекта автономной ортогональной системы координат, не
вращающейся в пространстве или изменяющей свою ориентацию заранее заданным образом. Указанное обстоятельство дало мощный толчок для развития инерциаль- ных навигационных систем.
Второе свойство гироскопа определяет его поведение при воздействии постоянных моментов внешних сил [19,20,23,24]. Так, момент внешней силы, приложенный относительно главной оси гироскопа, изменяет скорость вращения его рото- ра и не сказывается на направлении главной оси.
Если на ротор гироскопа действует внешний момент относительно оси, не совпадающей с главной, то ротор начинает прецессировать таким обра- зом, чтобы кратчайшим путем совместить вектор своего кинетического мо- мента с вектором момента внешней силы.
Используя указанное правило легко найти направление прецессии оси гироскопа.
Следующее свойство определяет поведение гироскопа при действии на него им- пульса момента внешней силы (удара). Если считать, что этот момент приложен к гироскопу в течение короткого промежутка времени t , то, используя теорему о кинетическом моменте, можно записать:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dH |
≈ |
H |
= |
|
или |
|
= |
|
t , |
(3.5) |
|||
M |
Н |
М |
|||||||||||
dt |
|
t |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||||
где Н - изменение вектора кинетического момента гироскопа за время t дейст- вия момента М . Учитывая, что это время мало, даже при относительно больших
величинах внешних моментов изменение кинетического момента гироскопа будет оставаться незначительным. Отсюда можно сделать вывод, что действие на гиро-
скоп импульса момента силы не приводит к существенному изменению век- тора его кинетического момента.
3.3. Природа гироскопического момента
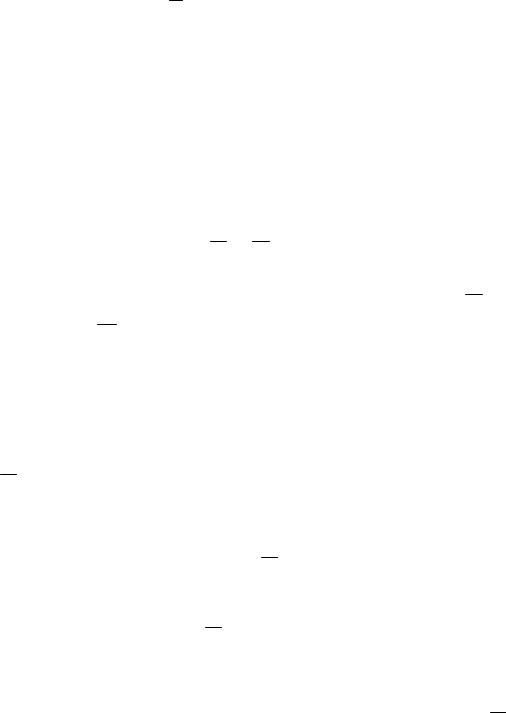
Рассматривая основные свойства гироскопа, мы заметили одну несколько не- ожиданную особенность его поведения. При действии момента внешней силы гиро- скоп не поворачивается в том направлении, в котором этот момент стремится его повернуть, а прецессирует вокруг оси, перпендикулярной приложенному моменту. Это свидетельствует о том, что по неизвестным пока причинам в рассматриваемых условиях возникает некоторый момент, обусловленный реакцией гироскопа, кото- рый уравновешивает момент внешней силы. Очевидно, что этот момент, названный гироскопическим моментом, по модулю равен приложенному извне моменту и направлен в противоположную сторону. Определим силы, порождающие указанный
момент.
φi |
z |
f1i |
|
С этой целью обратимся к |
||
ωz |
|
рис. 3.2. Выберем в роторе некото- |
||||
vi |
mi |
f3i |
|
рую i-ю точку с массой mi, радиус |
||
|
|
|
|
|
||
Мгy |
ρi |
|
|
|
|
– вектор ρi которой составляет с |
|
φi |
f2i |
|
осью оу угол φi. За счет вращения |
||
|
|
|||||
|
|
|
|
ротора с угловыми скоростями ωz и |
||
Ω |
о |
|
|
Ω на выбранную точку будут дей- |
||
|
|
|
|
|
ствовать центробежные силы f1i и |
|
х |
|
|
|
My |
у |
|
|
|
|
f2i , соответственно. Однако вслед- |
|||
|
|
|
|
|||
Рис. 3.2 |
|
|
|
|
|
ствие того, что обе эти силы лежат |
|
|
|
|
|
в плоскости ротора и их плечи от- |
|
|
|
|
|
|
|
|
носительно осей оу и oz равны нулю, они не могут создать интересующий нас гиро- скопический момент. Единственной силой, которая может это сделать, является си- ла кориолиса f3i . Величина указанной силы определяется следующим равенством:
f3i = 2miviωz sinϕi , |
(3.6) |
где vi – линейная скорость выбранной нами точки.
Моменты Муi и Mzi этой силы относительно осей, оу и oz, соответственно, будут равны:
М |
гyi |
= f |
3i |
ρ |
sinϕ |
i |
= 2ρ m v ω |
sin2 ϕ |
, |
|
|
i |
|
i i i z |
i |
(3.7) |
|||
M гzi |
= f3i ρi cosϕi = 2ρimiviωz sinϕi cosϕi |
||||||||
Принимая во внимание, что произведение ρimivi представляет собой момент коли- чества движения Нi i – ой точки относительно оси ох, равенства (3.7) можно пере- писать в следующем виде:
М |
гуi |
= 2H ω |
sin2 ϕ |
i |
= H ω |
z |
(1− cos 2ϕ |
), |
|
i z |
|
i |
i |
(3.8) |
|||
|
|
= 2Hiωz sinϕi cosϕi = |
|
|
||||
M гzi |
Нiωz sin 2ϕi. |
|||||||
Результирующий гироскопический момент, создаваемый всеми N материальными |
||||||||
точками ротора вокруг оси оу, будет равен |
|
|
|
|||||
|
|
N |
|
|
|
|
|
|
|
|
Мгу = åM гуi = Hωz , |
|
|
(3.9) |
|||
|
|
1 |
|
|
|
|
|
|
где Н – результирующий кинетический момент ротора. В силу периодичности функций sin2φi и cos2φi результирующий момент Mгz и составляющая
N
åHiωz cos2ϕi ,будут равны нулю.
1
В том случае, если момент внешней силы приложен к оси oz, прецессия гиро- скопа будет иметь место вокруг оси оу, и величина момента гироскопической реак- ции будет определяться следующим равенством:
Мгz = Hωy . |
(3.10) |
Таким образом, при воздействии на гироскоп момента внешней силы в результате его прецессии возникают силы кориолиса, образующие момент гироскопической реакции, который уравновешивает приложенный извне мо- мент. Величина момента гироскопической реакции равна произведению ки- нетического момента гироскопа на угловую скорость его прецессии. Вектор гироскопического момента направлен перпендикулярно векторам Н и угло- вой скорости прецессии в ту сторону, откуда с его конца движение по крат-
чайшей траектории вектора Н к вектору скорости прецессии видно происхо- дящим против часовой стрелки.
3.4. Методы составления уравнений гироскопических приборов
Уравнения гироскопического прибора или системы являются приближенной математической моделью реального изделия, позволяющей без использования на- турного макетирования исследовать его основные свойства и получить количест- венные характеристики интересующих нас параметров. На практике обычно не уда- ется составить уравнения, в полной мере соответствующие свойствам изделия, и тем более провести их анализ в общем виде. Поэтому изначально составляют уравнения с учетом тех или иных упрощающих допущений, а затем уже приводят их к виду, доступному для анализа каким-либо выбранным способом.
При составлении уравнений нужно четко определить:
§задачу, которую предстоит решить;
§кинематическую схему рассматриваемого прибора, с учетом основных факторов,
|
|
|
z0 |
|
|
|
|
влияющих на |
результат |
|
z |
|
|
|
|
|
анализа; |
|
|
|
|
|
|
|
|
|
|
||
&& |
r |
α&& |
|
|
|
§ |
круг возможных допуще- |
||
Mz |
|
|
|
|
|
|
ний, позволяющих упро- |
||
Iэ β |
Hq |
α& |
|
|
|
|
стить решение поставлен- |
||
|
ωzo My |
& |
|
|
|
ной задачи; |
|
||
|
|
|
|
|
|
|
|||
Hr |
|
|
|
|
|
§ |
используемый способ со- |
||
ωxo |
|
о |
β && |
|
|||||
|
|
|
β |
q |
y § |
ставления уравнений; |
|||
|
|
|
ωyo |
|
|
|
способ решения получен- |
||
х0 |
|
H |
Iэα&& |
|
|
|
|
ных уравнений и анализа |
|
|
|
|
|
|
|
у0 |
результатов исследования. |
||
α x1 |
|
|
|
|
|
|
Существуют |
различные |
|
|
|
|
|
|
|
|
|||
β |
x |
|
|
|
|
|
способы составления урав- |
||
|
|
|
|
|
нений, описывающих работу |
||||
Рис. 3.3 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
гироскопических |
приборов. |
||
Рассмотрим один из |
них, наиболее подходящий для изучения судоводителями. |
||||||||
|
|
|
Таким |
способом |
|
составления уравнений, |
использую- |
||
щимся, в основном, для качественного анализа работы относительно простых гиро- скопических устройств, является способ Б. И. Кудревича. В его основу положен принцип Даламбера, который применительно к вращательному движению может быть сформулирован следующим образом: сумма моментов всех сил, приложен-
ных к вращающемуся телу, равна нулю. Таким образом, задача составления уравнений гироскопа сводится к тому, чтобы определить все существенные момен- ты, действующие на его ротор, и их сумму приравнять нулю.
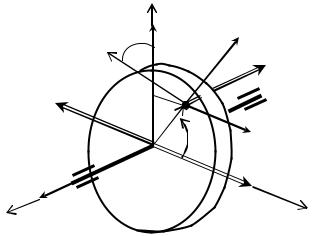
Рассмотрим последовательность решения указанной задачи на примере состав- ления уравнения трехстепенного гироскопа. Прежде всего, выбираем базовую сис- тему координат ох0у0z0 (рис. 3.3), которая, имеет идеальную для решаемой задачи (данного типа прибора) ориентацию осей. Будем считать, что эта система вращается в инерциальном пространстве с некоторыми угловыми скоростями ωxo,ω yo и ωzo .
Также примем, что в начальный момент времени оси Резаля совпадали с осями ба- зовой системы координат. Затем под действием внешних моментов ротор гироскопа стал последовательно поворачиваться с ускорением α&&и угловой скоростью α& во-
круг оси oz0, а также с ускорением β&&и угловой скоростью β& вокруг оси оу. В ре- зультате в некоторый фиксированный момент времени оси охуz, связанные с рото- ром, окажутся повернутыми относительно базовых осей на углы а и β. В процессе указанных поворотов на гироскоп действуют (рис. 3.3):
§ моменты сил инерции Iэα&& и Iэβ&&, направленные противоположно ускорениям
α&& и β&&;
§моменты гироскопической реакции Hq и Нr , где q и r абсолютные угловые скорости вращения осей Резаля ;
§моменты Му и Мz внешних сил.
Имеется целый ряд менее значимых по величине моментов, которые опущены из рассмотрения, в силу того, что они не искажают качественной картины поведения гироскопа и не существенно влияют на количественные оценки, если речь не идет об очень точных (прецизионных) приборах. Суммируя указанные моменты отдельно по осям оу и оz и приравнивая полученные суммы нулю, найдем:
− Iэβ&& − Hr + M y = 0, (3.11)
− Iэα&&cos β + Hq + M z = 0.
Учитывая малость угла β перепишем уравнения (3.11) в следующем виде:
Iэβ&& + Hr = M y , (3.12)
Iэα&& − Hq = M z .
Подставляя в равенства (3.12) выражения для абсолютных угловых скоростей q и r, запишем уравнения движения рассматриваемого гироскопа в окончательном виде:
&& |
+ H (ωzo + βωxo ) = M y |
, |
Iэβ + Hα& |
||
& |
|
(3.13) |
Iэα&& − Hβ − H (ω уo +αωxo )= M z . |
|
|
Полученная система уравнений показывает, что движение ротора гироскопа во- круг его осей взаимосвязано. Поэтому любое воздействие на гироскоп вызывает со- ответствующую его реакцию по обеим рассматриваемым осям.
Из уравнений (3.13) легко получить уравнения, которые описывают движение гироскопа относительно инерциальной (неподвижной в пространстве) системы ко- ординат.
Iэβ&& + Hα& = M y ,
(3.14)
Iэα&& − Hβ& = M z .
Дополнительно следует отметить, что для анализа сложных гироскопических систем очень часто исходные уравнения составляют, используя второй метод Ла- гранжа [20], позволяющий формальным путем получить наиболее точные уравне- ния.
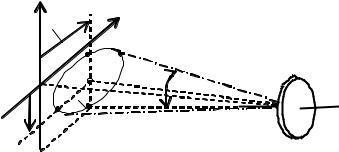
3.5. Движение гироскопа под действием постоянного момента внешней силы
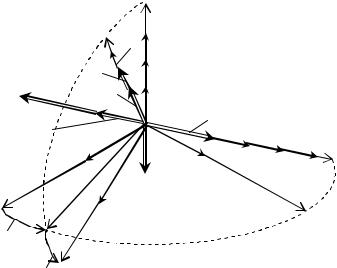
Как известно [19,20,23,24], при воздействии на гироскоп внешних импульсных моментов его ротор совершает незатухающие гармонические колебания, вокруг осей подвеса с достаточно высокой частотой и малой амплитудой (рис. 3.4). Указан- ные колебания называют нутаци-
|
β0 |
|
|
α0 |
|
αц |
|
|
|
|
|
|
|
|
|
|
|
1 |
2 ψ |
|
|
3 |
6 |
|
|
4 |
|
||
βц |
|
|
|
|
|
Рис. 3.4 |
|
||
|
&& |
= 0, |
Iэα&&0 = 0. |
|
|
Iэβ0 |
|||
Так как Iэ ¹ 0, то α&& = β&& = 0,
онными.
Именно в них проявляется специфический характер движения Р гироскопа по инерции. Действи- тельно, если ротор гироскопа не
вращается вокруг собственной оси (Н=0), то уравнения (3.14) его дви- жения примут вид:
(3.15)
а следовательно α& = const и β& = const. Как ви-
дим, при отсутствии собственного вращения гироскоп ведет себя как обычное твер-
дое тело. Под воздействием мгновенного момента внешних сил он начинает посто- янно вращаться вокруг своих осей подвеса, совершая вокруг них полные обороты. Нутационные же колебания не только носят совершенно иной характер, но они и пренебрежимо малы по величине. Для большинства практических задач, решаемых гироскопическими приборами на транспортных судах, эти колебания не имеют ни- какого значения, поскольку они, как правило, не фиксируются системой съема ин- формации с гироскопа. Однако на качество работы самого гироскопического прибо- ра они могут оказывать заметное влияние особенно тогда, когда речь идет о преци- зионных (точных) гироскопических системах.
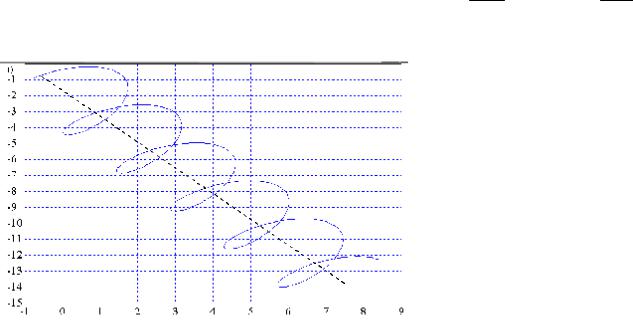
Наряду с этим, при воздействии постоянных моментов внешних сил имеет ме-
сто прецессия гироскопа с постоянными скоростями α&п = МНу и β&п = − МHz , в
β 10-6 рад
результате чего его ось не- прерывно изменяет свое на-
правление в пространстве (дрейфует) все больше и
больше удаляясь от своей начальной ориентации (рис. 3.5)
На практике даже от-
носительно небольшие внешние моменты могут вызвать ощутимую прецес-
α ×10−6 рад сию гироскопа. Как уже бы- ло указано выше, для снижения скорости прецессии гироскопа стремятся по воз- можности уменьшить уровень внешних моментов, действующих на него и увели- чить значение кинетического момента гироскопа.
3.6. Особенности поведения гироскопа с двумя степенями свободы
Многие гироскопические системы создаются на базе гироскопов с двумя сте- пенями свободы. В зависимости от типа дополнительных связей, которыми снабжа- ются названные гироскопы они разделяются на интегрирующие и дифференци- рующие. Имеются гироскопические приборы, обеспечивающие получение выход- ных сигналов с более сложными зависимостями от измеряемой величины, но мы их рассматривать не будем.