

Студеникин - Технические средства судовождения
.pdfГИДРОАКУСТИЧЕСКИЕ ПРИБОРЫ И |
Раздел |
ИНДУКЦИОННЫЕ ЛАГИ |
2 |
|
ВВЕДЕНИЕ К РАЗДЕЛУ
Гидроакустические приборы, основы построения которых рассматриваются в данном разделе, используются, в основном, для измерения скорости движения судна и глубины под его килем.
Информация о скорости судна является одним из основных параметров, характе- ризующих его текущее состояние. От качества этой информации в значительной степени зависит точность определения целого ряда других данных, используемых как для решения навигационных задач, так и задач управления движением судна. В этом легко убедиться, обратив внимание на рис. 2.1 [2], на котором представлены основные потребители рассматриваемой информации. Как это следует из рисунка,
Инерциальные навигационные системы
Системы |
|
Спутниковые |
предупреждения |
|
|
столкновений |
|
навигационные системы |
Автопрокладчики |
ЛАГ |
Гирокомпасы, |
|
|
гироазимуты |
Измерители течений |
|
Системы обеспечения |
|
швартовки |
|
|
|
Системы |
РЛС |
|
позиционирования |
|
|
буровых судов |
Рис. 2.1 |
Системы, решающие |
|
специальные задачи |
|
ошибки измерения скорости судна снижают точность определения параметров от- носительного движения встречных судов, координат места и курса собственного

судна, его текущих динамических характеристик и, как следствие, уменьшают безо- пасность мореплавания.
Рассматриваемые гидроакустические приборы и индукционные лаги являются одними из основных средств, которые позволяют судоводителю успешно решать различные профессиональные задачи. В последнее время они довольно интенсивно совершенствуются и становятся более универсальными. Так, отдельные образцы ла- гов одновременно выполняют функции эхолота, определяя глубину под килем суд- на, и оценивают угловую скорость его поворота. Современные измерители скорости движения судна, основанные на различных принципах и способные работать в со- ставе интегрированных навигационных комплексов, предусматривают возможность
совместной обработки полученной информации с целью повышения ее точности и надежности. Это весьма важно в современных условиях, характерной особенностью которых является все более ускоряющийся процесс автоматизации судовождения, предусматривающий внедрение “интеллектуальных” систем и снижение влияния “человеческого фактора” на аварийность.
Изучение основ работы гидроакустических навигационных приборов уместно начать со знакомства с основами терминами, используемыми в теории гидроакусти- ки.
2.1. Параметры, характеризующие звуковое поле
Под звуковым полем понимают ту ограниченную область пространства, в ко- торой распространяется гидроакустическая посылка. Звуковое поле может сущест- вовать в любой упругой среде и представляет собой колебания ее частиц, возни- кающие в результате воздействия внешних возмущающих факторов. Отличитель- ной особенностью указанного процесса от любого другого упорядоченного движе- ния частиц среды является то, что при малых возмущениях распространение волн не связано с переносом самого вещества. Иными словами, колебания каждой части- цы происходит относительно того положения, которое она занимала до воздействия возмущения.
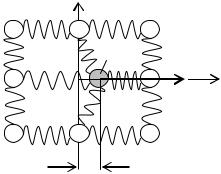
Идеальную упругую среду, в которой распространяется звуковое поле, можно представить в виде совокупности абсолютно жестких ее элементов, связанных между собой упругими связями (рис.2.2). Текущее состояние колеблющейся час-
тицы этой среды характеризуется ее смещением U относительно равновесного положения, колебательной скоростью v и частотой колебаний. Колебательная скорость определяется первой производной по времени от смещения частицы и яв-
Ультразвуковое поле часто называют звуковым.
у |
ляется важной характеристикой рассматриваемого |
||
процесса. Как правило, оба параметра являются |
|||
|
|||
1 |
гармоническими функциями времени. |
||
Частица 1 (рис. 1.1), сместившаяся на вели- |
|||
|
|||
v |
x чину U от своего равновесного положения, че- |
||
|
рез упругие связи оказывает воздействие на ок- |
||
U |
ружающие ее частицы, заставляя их также сме- |
||
щаться. В результате, |
возмущение, привнесен- |
||
Рис.2.2 |
ное извне, начинает |
распространяться в рас- |
|
|
|||
сматриваемой среде. Если закон изменения смещения частицы 1 определяется ра- венством U = Um sinωt, где Um – амплитуда колебания частицы, а ω - частота ко- лебаний, то закон движения других i – ых частиц может быть представлен в виде:
Ui = Umi sin(ωt −ψi ), |
(2.1) |
где Umi – амплитуда колебания i – ой частицы, ψi – фазовый сдвиг этих колебаний. По мере удаления от источника возбуждения среды (частицы 1) значения амплитуд колебаний Umi из-за рассеяния энергии будут убывать, а фазовые сдвиги ψi в силу ограниченности скорости распространения возбуждения - увеличиваться. Таким об- разом, под звуковым полем можно понимать также совокупность колеблющихся частиц среды.
Если в звуковом поле, выделить частицы, имеющие одинаковую фазу колебаний, мы получим кривую или поверхность, которую называют фронтом волны. Фронт волны постоянно удаляется от источника возмущения с определенной скоростью,
которая называется скоростью распространения фронта волны, скоростью рас-
пространения волны или просто скоростью звука в данной среде. Вектор указан-
ной скорости перпендикулярен поверхности фронта волны в рассматриваемой точке и определяет направление звукового луча, вдоль которого распространяется волна. Эта скорость существенно зависит от свойств среды и ее текущего состояния. В случае распространения звуковой волны в море скорость звука зависит от темпера- туры воды, ее плотности, солености и ряда других факторов. Так, при увеличении температуры на 1 0С, скорость звука увеличивается примерно на 3,6 м/с, а при увели- чении глубины на 10 м она повышается примерно на 0,2 м/с. В среднем в морских ус- ловиях скорость звука может изменяться в пределах 1440 – 1585 м/с. Если среда анизотропная, т.е. имеющая различные свойства в различных направлениях от центра возмущения, то скорость распространения звуковой волны будет также различной, за- висящей от этих свойств.

В общем случае, скорость распространения звуковой волны в жидкости или газе определяется следующим выражением:
с = |
|
К |
|
, |
(2.2) |
|
|||||
|
|
ρ0 |
|
||
где К – модуль объемной упругости среды, ρ0 – плотность невозмущенной среды, ее статическая плотность. Модуль объемной упругости численно равен напряжению, которое возникает в среде при ее единичной относительной деформации.
Упругая волна называется продольной, если колебания рассматриваемых частиц происходят в направлении распространения волны. Волна называется поперечной, если частицы колеблются в плоскостях, перпендикулярных к направлению распро- странения волны.
Поперечные волны могут возникать только в такой среде, которая обладает уп- ругостью формы, т.е. способна сопротивляться деформации сдвига. Этим свойством обладают лишь твердые тела. Продольные волны связаны с объемной деформацией среды, поэтому они могут распространяться как в твердых телах, так и в жидких и газообразных средах. Исключением из этого правила являются поверхностные вол- ны, образующиеся на свободной поверхности жидкости или на поверхностях разде- ла несмешивающихся сред с разными физическими характеристиками. В этом слу- чае частицы жидкости одновременно совершают продольные и поперечные колеба- ния, описывая эллиптические или более сложные траектории. Особые свойства по- верхностных волн объясняются тем, что в их образовании и распространении опреде- ляющую роль играют силы тяжести и поверхностного натяжения.
В процессе колебаний в возмущенной среде возникают зоны повышенного и по- ниженного по отношению к равновесному состоянию давления и плотности. Давле- ние р = р1 − р0,где р1 - мгновенное его значение в звуковом поле, а р0 - стати- ческое давление среды при отсутствии возбуждения, называется звуковым и чис- ленно равно силе, с которой волна действует на единичную площадку, установлен- ную перпендикулярно направлению ее распространения. Звуковое давление являет- ся одной из важнейших характеристик состояния среды.
Для оценки изменения плотности среды используют относительную величину, называемую уплотнением χ, которая определяется следующим равенством:
χ = |
ρ1 − ρ0 |
, |
(2.3) |
|
|||
|
ρ0 |
|
|
где ρ1 – мгновенное значение плотности среды в интересующей нас точке, а ρ0 – ее статическая плотность.
Все названные выше параметры могут быть определены, если известна некото-
рая скалярная функцияϕ, называемая потенциалом колебательной скорости. В
соответствии с теоремой Гельмгольца этот потенциал полностью характеризует аку- стические волны в жидких и газообразных средах и связан с колебательной скоро- стью v следующим равенством:
v |
= grad ϕ . |
(2.4) |
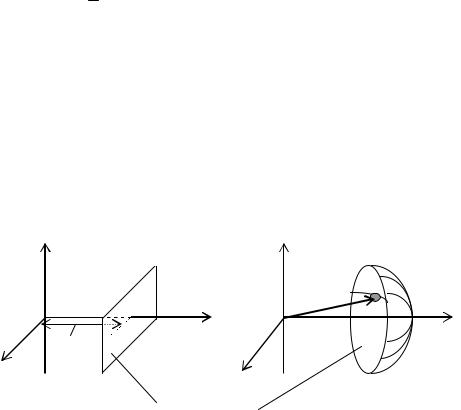
Продольная звуковая волна называется плоской, если ее потенциал ϕ и другие, свя- занные с ним величины, характеризующие звуковое поле, зависят только от времени и одной их декартовых координат, например, х (рис.2.3).
Если упомянутые величины зависят только от времени и расстояния r от некото- рой точки о пространства, называемой центром волны, продольная звуковая волна называется сферической. В первом случае фронт волны будет представлять собой
z |
Плоская волна |
z |
Сферическая волна |
|
o |
х |
o |
r |
|
х |
||||
|
|
|||
|
х |
|
|
|
у |
|
у |
|
|
|
|
|
Фронт волны
Рис. 2.3
линию или плоскость, во втором – дугу или участок сферической поверхности.
В упругих средах при рассмотрении процессов в звуковых полях можно ис- пользовать принцип суперпозиции. Так, если в среде распространяется система волн, определяемых потенциалами ϕ1…ϕn, то потенциал результирующей волны будет равен сумме указанных потенциалов:
n |
|
ϕ = åϕi. |
(2.5) |
1 |
|
Однако при рассмотрении процессов в мощных звуковых полях следует учитывать возможность проявления нелинейных эффектов, которые могут сделать недопусти- мым использование принципа суперпозиции. Кроме того, при высоких уровнях

возмущающего среду воздействия могут быть радикально нарушены упругие свой- ства среды. Так, в жидкой среде могут возникнуть разрывы, заполненные воздухом, измениться ее химическая структура и т.д. На представленной ранее (рис. 2.2) моде- ли это будет эквивалентно разрыву упругих связей между частицами среды. В этом случае энергия, затрачиваемая на создание колебаний, практически не будет переда- ваться другим слоям, что сделает невозможным решение той или иной практиче- ской задачи. Описанное явление получило название кавитации.1
С энергетической точки зрения звуковое поле может характеризоваться пото-
ком звуковой энергии или звуковой мощностью Р, которые определяются количе-
ством звуковой энергии W, проходящей через поверхность, перпендикулярную на- правлению распространения волны, в единицу времени:
Р = |
W . |
(2.6) |
|
t |
|
|
|
Звуковая мощность, отнесенная к площади s рассматриваемой поверхности, опреде- ляет интенсивность звуковой волны:
I = |
Р |
= |
W |
. |
(2.7) |
s |
|
||||
|
|
st |
|
||
В последнем выражении принято, что энергия распределена равномерно на площад- ке s.
2.2. Общая характеристика приемно-передающих антенн
Ферромагнитные преобразователи электрической энергии в механическую ис- пользуют эффект магнитострикции [15]). Сущность этого эффекта состоит в том,
что при изменении магнитного состояния изделия из ферромагнитного материала происходит некоторое изменение его размеров. Образец деформируется, и эта де- формация возрастает с увеличением интенсивности его намагничивания. Если в ка- честве образца взять стержневой сердечник, снабдить его обмоткой и запитать ее переменным током, то длина сердечника будет периодически изменяться. Электри- ческая энергия, затрачиваемая на его намагничивание, преобразуется в энергию ме- ханических колебаний, способную возбуждать звуковое поле в упругой среде (в жидкости), в которую помещается рассматриваемый стержень.
1 Физическая сущность явления кавитации выглядит сложнее представленной (см., например, [4]). При ее возникновении антенна воспринимает также повышенные динамические нагрузки.
Существует и обратный эффект. Если сердечник из ферромагнитного материа- ла, имеющего некоторую остаточную намагниченность, несколько деформировать, т.е. изменить его внутреннее напряжение, то изменится и напряженность магнитно- го поля, связанного с ним. При этом изменение магнитного поля будет происходить практически пропорционально изменению линейного размера сердечника. Это об-
стоятельство позволяет магнитострикционные преобразователи использовать и в качестве приемных антенн.
Различают неполяризованные и поляризованные магнитострикционные вибра- торы с устройством которых можно познакомиться, например, в [15].
Следует отметить, что магнитострикционные вибраторы морально устаревают, уступая место своим конкурентам - пьезокерамическим вибраторам.
Работа последних построена на использовании пьезоэлектрического эффекта, свойственного пьезокерамике на основе титаната бария, метаниобата свинца или цирконата свинца. Сущность эффекта заключается в том, что при подаче напряже- ния на электроды, нанесенные на поверхность вибраторов, происходит их деформа- ция и наоборот, если деформировать вибратор, то на его электродах появится по- тенциал, зависящий от величины этой деформации. Таким образом, указанные виб- раторы можно использовать в качестве приемных и передающих антенн. Пьезоке- рамические вибраторы имеют хорошие эксплуатационные показатели, технологич- ны в изготовлении и надежны в работе.
Пьезокерамическая антенна, как правило, состоит из активного элемента (кера- мики), наклеенного на металлическую накладку (мембрану). При этом путем выбора
акустических характеристик керамики и накладки можно в определенных пределах изменять параметры всей антенны.
Параметры излучения, создаваемого антенной, определяются видом ее излу- чающей поверхности. С этой точки зрения все антенны могут быть разделены на
точечные, сплошные вибраторы и антенные решетки.
Точечные антенны имеют размеры излучающей поверхности меньшие длины волны излучаемого сигнала. Они создают практически не направленное излучение,
т.е. такое, которое в изотропной среде имеет одинаковую интенсивность в различ- ных направлениях.
Сплошные вибраторы имеют размеры, превосходящие длину волны излучае-
мых колебаний, и создают излучение, обладающее определенной направленностью.
Если вибрирующей поверхностью является плоскость, то максимальное значение звукового давления или интенсивности сигнала будет иметь место в направлении, перпендикулярном плоскости излучателя.
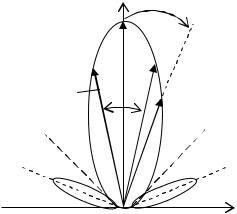
Графическое представление закона изменения звукового давления или другого параметра, характеризующего излучение, в зависимости от направления излучения называется диаграммой направленности ан-
|
у |
α |
|
|
тенны (рис. 2.4). Угол β, заключенный между |
|
|
|
|
двумя векторами, соответствующими вели- |
|
|
|
|
|
|
|
|
р0 |
|
|
|
чине звукового давления на уровне 0,7 от его |
0,7р0 |
|
рα |
|
|
максимального значения, определяет ширину |
|
|
|
диаграммы направленности. В некоторых |
||
β |
|
|
|||
|
|
3 |
|
случаях этот параметр определяется на дру- |
|
3 |
|
|
|
||
|
|
|
гом уровне относительной величины звуко- |
||
|
|
|
|
|
|
1 |
|
2 |
|
|
вого давления, который оговаривается до- |
|
|
х |
полнительно. |
||
Рис.2.4 |
|
|
Степень направленности излучения мож- |
||
|
|
|
|||
|
|
|
|
|
но характеризовать и коэффициентом кон- |
центрации, который в режиме генерации сигнала равен отношению акустических мощностей, излучаемых ненаправленной и направленной антеннами, создающими сигналы одинаковой интенсивности в выбранном направлении на равном расстоя- нии от центров излучения. Тот же параметр в режиме приема определяется как от- ношение мощностей, развиваемых ненаправленной и направленной антеннами, на- ходящимися в поле изотропных помех, при равных чувствительностях антенн. Иными словами, чем уже диаграмма направленности антенны, тем, при одинаковом уровне распределенных вокруг нее помех, будет меньше выходной сигнал антенны, порождаемый ими. За счет этого при использовании приемных антенн с высоким коэффициентом концентрации удается получить хорошее отношение полезного сиг- нала к сопровождающему его шуму.
Важным параметром, приемной антенны является ее чувствительность, кото-
рая характеризует способность антенны качественно преобразовывать звуковую энергию. Она представляет собой отношение напряжения, возникающего на выходе антенны, к воздействующему на нее звуковому давлению. Чувствительность антен- ны является функцией многих параметров, в число которых входит частота прини- маемого сигнала. Зависимость чувствительности антенны от частоты определяется ее частотной характеристикой.
Как правило, антенны настраиваются на определенную резонансную частоту, при которой они имеют максимальную чувствительность. При отклонении частоты принимаемого сигнала от резонансной снижается чувствительность антенны, а вме- сте с ней и уровень выходного напряжения. Диапазон частот, в рамках которого чувствительность приемной антенны или звуковое давление передающей снижают-
ся до уровня, равного 0,7 (в отдельных случаях может быть принято другое значе- ние) от их максимальной величины, называется полосой пропускания антенны. Ширина этой полосы выбирается в соответствии с характером решаемой задачи.
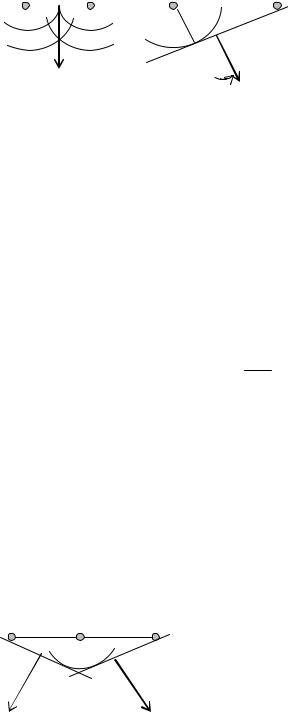
Антенная решетка представляет собой сочетание точечных вибраторов, кото-
|
|
ψ=0 |
|
|
ψ= ψ1 |
|
рые запитываются таким образом, чтобы |
||
A |
B |
B |
получить желаемую диаграмму направ- |
||||||
d |
A d |
||||||||
1 |
|
|
|
|
|
|
|
ленности. Рассмотрим два точечных виб- |
|
|
|
|
|
|
|
|
ратора А и В (рис. 2.5), расстояние между |
||
|
|
|
|
|
|
|
|||
2 |
|
|
|
|
C |
|
|
||
|
pm |
1 |
α |
pm |
которыми равно d. Если эти вибраторы |
||||
|
|
|
|||||||
Рис.2.5 |
|
|
|
питаются синфазным напряжением (фаза |
|||||
|
|
|
|
|
ψ=0), то фаза волн, образуемых ими, на |
||||
|
|
|
|
|
|
|
|
||
одинаковом удалении от них будет одной и той же. Фронты 1 и 2 общей волны бу- дут параллельны базе антенной решетки, а направление максимума излучения будет перпендикулярно ей. В рассматриваемом случае диаграмма направленности антен- ны будет аналогична диаграмме сплошного вибратора.
Если напряжение питания вибратора В отстает по фазе от напряжения питания вибратора А на величину ψ1, то в момент излучения первым элементом волны, с фа- зой равной нулю, вторая волна от элемента А уже пройдет расстояние АС, равное
АС = |
λ |
ψ1. |
(2.8) |
2π |
Фронт общей волны будет повернут относительно базы антенны на угол
α = arcsin |
AC |
= arcsin |
λψ1 . |
(2.9) |
|
d |
|||||
|
|
2πd |
|
Из выражения (2.9) следует, что угол наклона направления максимума излучения относительно базы антенны зависит от разницы фаз напряжений, питающих вибра-
торы. Это позволяет создавать антенны не только с произвольно ориентированным лу-
А |
В |
С |
чом, но и с лучом, изменяющим свою ориентацию во вре- |
мени. |
2 Антенная решетка позволяет создавать многолучевое излучение. Так, если три вибратора, расположенные на рт2 одной линии (рис. 2.6), питаются таким образом, что
крайние элементы А и С имеют фазовое отставание на некоторый угол относительно вибратора В, то по вышеизложенным соображениям система будет генерировать два симметричных луча. Если расположить еще два вибратора в перпендикулярной плоскости, то будут образованы четыре луча.
2.3. Общая характеристика навигационных эхолотов
Навигационные эхолоты предназначены для измерения глубины под килем суд- на. Выпускаются разнообразные модели рассматриваемых приборов, рассчитанных на измерение различных глубин и предназначенных для использования на судах, различного типа.
Несмотря на относительно большое разнообразие образцов приборов, их работа основана на одном принципе - измерении времени t прохождения сигнала гидроаку- стической посылки до дна и обратно.
h = 0,5ct. |
(2.10) |
Посылка, как правило, представляет собой короткий импульс, промодулирован- ный сигналом несущей частоты.
Типовой состав эхолота включает в себя:
§антенные устройства;
§устройство, формирующее сигнал посылки (передающее устройство);
§приемное устройство;
§командное устройство, управляющее работой эхолота;
§устройства отображения и регистрации информации;
§устройство для переключения антенны с приема на передачу в случае эхолота, использующего одну приемно-передающую антенну.
Вобщем случае эхолот может иметь или одну приемо-передающую антенну или две антенны – приемную и передающую. Преимущественное распространение в на- вигационных эхолотах нашли антенны типа “сплошной вибратор”. Причем в по- следнее время, как это уже отмечалось выше, чаще всего применяются пьезокера- мические вибраторы.
Существенное влияние на качество работы эхолота оказывают параметры диа- граммы направленности антенны, поскольку они в значительной степени определя- ют надежность приема отраженного сигнала и его уровень. Как правило, на практи- ке ширина диаграммы направленности выбирается такой, чтобы при наличии качки судна был обеспечен устойчивый прием отраженного от дна сигнала при макси- мально возможной измеряемой глубине. Это достаточно хорошо обеспечивается в случае равенства половины угла раствора диаграммы направленности максималь- ному значению угла отклонения судна от вертикали. При выполнении указанного
условия даже при слабой рассеивающей способности поверхности дна часть энергии гарантированно отразится в направлении антенн. В связи с тем, что максимальные значения углов крена и дифферента судна в процессе его качки не совпадают, зна-