

1.4. Примеры четырехзвенных плоских механизмов
В технике получили наибольшее значение распространенные четырехзвенные плоские рычажные механизмы: шарнирный четырехзвенник (рис. 1.3, а), кривошипно-ползунный (рис. 1.3, б) и кулисный (рис. 1.3, в).

Рис
1.3.
Четырехзвенные плоские механизмы
В зависимости от характера движения звенья принято называть следующим образом: кривошип – звено, образующее вращательную пару со стойкой и совершающее полный оборот вокруг оси этой пары; коромысло образует вращательную пару со стойкой, но не совершает полного оборота вокруг оси; шатун – звено, которое совершает сложное движение в пространстве и образует кинематические пары только с подвижным звеньями; ползун – образует поступательную пару со стойкой и движется прямолинейно; кулиса – звено, вращающееся вокруг неподвижной оси и образующие с другим звеном поступательную пару.
В теоретической механике обобщенными координатами механической системы называют независимые параметры, однозначно определяющие положение системы. Как уже было отмечено, под обобщенной координатой механизма будем понимать каждую из независимых между собой координат, определяющих положение всех звеньев механизма относительно стойки.
Число степеней свободы механизма число его обобщенных координат
Для определения числа степеней свободы механизма (W) в зависимости от его строения служат структурные формулы. В общем случае для пространственного механизма (структурная формула Сомова–Малышева):
![]() ,
где
,
где
n - число подвижных звеньев, S - число условий связи,
p1 - число одноподвижных пар, р2- число двухподвижных пар,
р3 - число трехподвижных пар, р4 – число четырехподвижных пар,
p5 – число пятипожвижных пар.
Механизмы, траектория точек звеньев которых, расположены в одной или параллельных плоскостях называются плоскими. В техники такие механизмы нашли наиболее широкое применение.
На плоскости свободное тело (звено) имеет три степени, свободы, соответственно n свободных звеньев - 3 n степеней свободы. Если конструировать плоскую кинематическую цепь из n звеньев с числом одноподвижных пар р1 и двухподвижных р2, то общее число условий связи S = 2 p1 + p2 , поскольку одна одноподвижная пара при плоском движении наложит два условия связи, а двухподвижная - одну.
![]() (Формула
Чебышева).
(Формула
Чебышева).
Можно
доказать, что в плоском механизме
одноподвижные
кинематический пары являются низшими,
а двухподвижные
- высшими.
Тогда формула Чебышева примет вид:
![]() ,
,
где рН и рВ - соответственно число пар низших и высших.
В состав плоского механизма не могут входить трех-, четырех- и пятиподвижные пары, поскольку движение каждого звена ограничено в этом случае наложением трех общих условий связи.
1.5. Строение плоских механизмов по л. В. Ассуру
Профессор Л. В. Ассур в 1914-1918 гг. сформулировал принципы создания и исследования плоских рычажных механизмов с низшими парами.
О сновная
идея Л.В. Ассура состоит в том,что
любой плоский механизм может быть
создан путем присоединения к начальному
звену (или начальным звеньям) и стойке
кинематических цепей нулевой подвижности,
называемых структурными группами
(группами Ассура).
сновная
идея Л.В. Ассура состоит в том,что
любой плоский механизм может быть
создан путем присоединения к начальному
звену (или начальным звеньям) и стойке
кинематических цепей нулевой подвижности,
называемых структурными группами
(группами Ассура).
По классификации И. И Артобо-левского начальное звено и стойка, образующие одноподвижную кинематическую, являются механизмом 1-ого класса (рис. 1.4).
Рис 1.4. Механизмы первого класса
Н
Рис.
1.4 Механизмы
1-ого класса.![]() ,
если свободные элементы присоединить
к стойке (рис. 1.5 б). В этом случае группа
превращается в ферму.
,
если свободные элементы присоединить
к стойке (рис. 1.5 б). В этом случае группа
превращается в ферму.
Для групп Ассура характерно определенное соотношение между числом звеньев и кинематических пар для групп только с одноподвижными парами
![]() ,
т.е.
,
т.е. ![]()
На рис. 1.5 представлены механизмы, образованные подсоединением к механизму 1-ого класса и стойке групп Ассура.

Рис. 1.5 Порядок образования механизмов.
Поскольку WГР = 0, степень подвижности механизма равна числу начальных (ведущих звеньев) или числу механизмов 1-ого класса. Например, для механизмов, представленных на рис. 1.5 а и б, W=1+0=1. При двух механизмах 1-ого класса и одной присоединенной группе (рис. 1.7 в) W=1+0+1=2.
Класс группы определяется наивысшим по классу контуром, входящим в ее состав.
Класс контура зависит от числа кинематических пар, входящих в контур.
П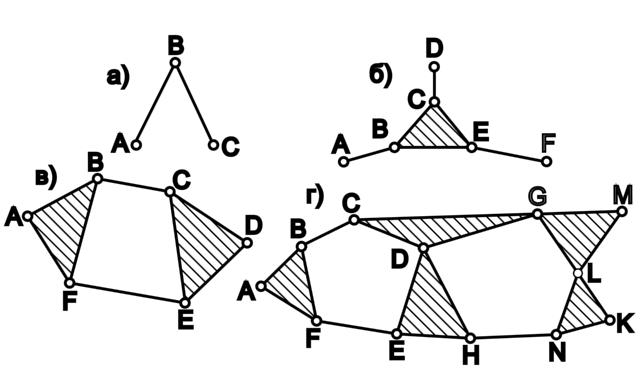 орядок
группы
определяется
числом свободных элементов, количеством
внешних кинематических пар, которыми
группа присоединяется к механизму.
орядок
группы
определяется
числом свободных элементов, количеством
внешних кинематических пар, которыми
группа присоединяется к механизму.
Рис.
1.6 Группы
Ассура
а второго класса
б третьего класса
в четвертого
класса
г пятого класса
На рис. 1.6 представлены группы Ассура различных классов. Звеньями этих групп образованны контуры:
в группе ABC (рис.1.10 а) – контур АВ или ВС содержит 2 кинематические пары, следовательно, является контуром 2–ого класса;
в группе ABCDEF (рис.1.10 б) – контур BCD 3 – его класса;
в группе ABGDEF (рис. 1.10 в) – контур BCEF 4 – ого класса;
в группе ABCDEFGHKLMN (рис 1.10 г) можно отыскать два контура 5–ого класса BCDEF и DGLNH, которые содержат по 5 кинематических пар.
Сочетание чисел n = 2 и р1 = 3 характерно для структурных групп 2–ого класса, сочетание n = 4, р1 = 6 при наличии трех поводков и одного базисного звена – для групп 3–ого класса.
В практике синтеза механизмов наибольшее распространение получили группы 2-ого класса. В зависимости от числа и взаимного расположения вращательных и поступательных кинематических пар различают 5 видов структурных групп 2–ого класса (см. табл. 1.3).
Таблица 1.3
Виды групп Ассура 2-ого класса
|
№ вида
|
Схема группы |
Вид и расположение пар
|
Пример образованных механизмов
|
Название механизма
|
|
1 |
|
Все пары вращательные |
|
Шарнирный четырехзвенник
|
|
2 |
|
Две пары вращательные |
|
Кривошипно-ползунный
|
|
3 |
|
Две пары вращательные |
|
Кулисный |
|
4 |
|
Две пары поступательные, одна вращательная |
|
Кулисно-ползунный (тангенсный) |
|
5 |
|
Две пары поступательные, одна вращательная |
|
Механизм двойного ползуна (синусный) |










Ниже будут продемонстрированы алгоритмы расчетов, разработанных для отдельных групп Ассура используемых при кинематическом и силовом анализе механизмов.
Пассивные
связи.
Иногда при
разработке конструкций механизма в
схему для увеличения его жесткости или
устранения неопределенности движения
звеньев в некоторых положениях в
кинематическую схему включают
дополнительные звенья, которые
фактически не оказывают влияния на его
кинематику. Например, на рис. 1.7 а
представлен сдвоенный параллелограмм,
в схему которого введено дополнительное
звено CD=AB
(ОА = BE,
AC
= CD).
По формуле Чебышева имеем:
![]() .
.
В действительности W=1, т.к. дополнительное звено в силу особого выбора размеров звеньев (фигуры ACDB и ОАВЕ являются параллелограммами) не налагается новых связей. Такие звенья и кинематические, которые они образуют, называют пассивными условиями связи.
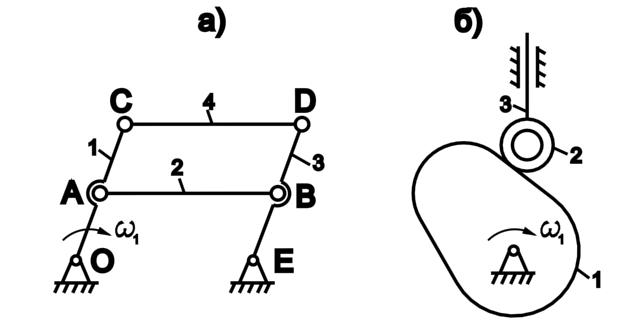
Рис.
1.7 Параметры
механизмов: а) с пассивной связью;
б) с лишней степенью
свободы.
Лишние
степени свободы.
У кулачкового
механизма (рис. 1.7 б) по формуле
Чебышева
![]() ,
хотя движение толкателя 3 полностью
определяется движением кулачковой
шайбы 1. Лишняя степень свободы появилась
из-за возможности произвольного вращения
ролика 2 вокруг своей оси. Она не
влияет на кинематику толкателя. Введение
в конструкцию ролика обусловлено
необходимостью уменьшить трение, а,
следовательно, и износ высшей
кинематической пары.
,
хотя движение толкателя 3 полностью
определяется движением кулачковой
шайбы 1. Лишняя степень свободы появилась
из-за возможности произвольного вращения
ролика 2 вокруг своей оси. Она не
влияет на кинематику толкателя. Введение
в конструкцию ролика обусловлено
необходимостью уменьшить трение, а,
следовательно, и износ высшей
кинематической пары.
При решении задач структурного, кинематического и точностного анализа механизмов с высшими парами, а также выявления в них степеней свободы используют прием условной замены высшей пары кинематической цепью с низшими парами. Механизм, полученный в результате замены, называют заменяющим.
Условием замены является структурная (степени свободы исходного и заменяющего механизмов одинаковы) и кинетическая (сохранение относительного движения звеньев, составляющих высшую пару) эквивалентность.
В плоском механизме структурная эквивалентность соблюдается, если одна высшая пара заменяется одним дополнительным звеном, входящим в две дополнительные низшие пары со звеньями, образующими высшую пару. Для обеспечения кинематической эквивалентности необходимо, дополнительные низшие вращательные кинематические пары располагать в центрах кривизны звеньев, образующих высшую пару.
Примеры заменяющих механизмов представлены на рис. 1.8.

Рис. 1.8 Примеры
заменяющих механизмов
