

Zagryadtskiy_elektr_mashiny_3
.pdf50 Гц. Например, универсальный двигатель серии УВ при мощности 400 Вт и напряжении −220 + 220В имеет частоту вращения
+ 220В имеет частоту вращения
15000 мин−1.
Регулирование частоты вращения на постоянном токе осуществляется путем изменения сопротивления, включаемого в цепь якоря, а также изменением питающего напряжения и шунтированием обмотки возбуждения. На переменном токе регулирование частоты вращения осуществляется, в основном, изменением подводимого напряжения.
2.14. Потери и коэффициент полезного действия
Машина постоянного тока является преобразователем энергии: в генераторах механическая энергия преобразуется в электрическую энергию, в двигателях электрическая энергия – в механическую энергию. Преобразование энергии связано с тем, что ее некоторая часть превращается в потери.
Потери в машине постоянного тока бывают следующих видов: электрические, магнитные, механические, добавочные.
Электрические потери рэл. Они имеют место в обмотке якоря ра , в обмотке возбуждения рв , в обмотке добавочных полюсов рдп , в компенсационной обмотке рк , в контактном узле коллектор-щетки рщ. Потери в обмотках определяются по общей формуле р = I 2r, где
I и r − ток в обмотке и сопротивление обмотки. |
|
Потери в щеточном контакте равны произведению |
∆UщI я, |
в среднем ∆Uщ = 2В. |
|
Результирующие электрические потери |
|
рэл = ра + рв + рдп + рк + рщ. |
( |
|
2.61) |
Магнитные потери рм. Магнитные потери на гистерезис и вихре-
вые токи |
в сердечнике и зубцах якоря возникают при его вращении. |
||||
Они определяются по формуле |
|
|
|||
|
рм = 2,3р1,0 / 50 |
f1 |
1,3 (кдаВа |
2ma +kдz Bz2mz ), |
( |
|
|
2.62) |
|||
|
50 |
|
|
||
где p1,0 / 50 |
− удельные потери при индукции B =1Tл и частоте 50 Гц; |
||||
кда и кдz − коэффициенты, кда =1,6 и кдz =1,8; Ва и Вz − индукции в сердечнике и зубцах;
150

ma и mz − вес стали сердечника и зубцов.
Механические потери рмех. Они слагаются из потерь на трение щеток о коллектор − ртщ, потерь на вентиляцию − рвен и потерь на трение в подшипниках − ртр.
Потери на трение щеток о коллектор
ртщ = 7,5∑Sщvk , |
( |
где ∑Sщ − суммарная площадь контакта всех щеток; |
2.63) |
|
vk − окружная скорость коллектора.
Потери на вентиляцию и трение в подшипниках можно определить согласно [5].
Добавочные потери для некомпенсированных машин рдоб. Они определяются по формуле
рдоб = 0,01Рном η. |
( |
Полные потери машины постоянного тока |
2.64) |
|
|
Σр = рэл + рм + рмех + рдоб. |
|
Коэффициент полезного действия (КПД) двигателя постоянного тока представляет собой отношение полезной мощности Р2 к подве-
денной мощности Р1
η % = |
Р2 |
100 % = |
Р2 |
100%. |
( |
|
Р |
Р + Σр |
2.65) |
||||
|
|
|
||||
|
1 |
|
2 |
|
|
Коэффициент полезного действия генератора равен отношению отдаваемой мощности Р2 =UI к подводимой к валу генератора меха-
нической мощности приводного двигателя Р1 . КПД определяется по
формуле (2.65).
Машины постоянного тока мощностью 10…1000 кВт имеют КПД равный 0,85…0.925 %.
Примерная характеристика КПД приведена на рис. 2.48.
Все потери в машине при ее работе превращаются в тепловую энергию и нагревают машину. Величина потерь зависит от нагрузки машины, чем выше нагрузка, тем сильнее нагревается машина. Температура зависит не только от величины потерь, но также и окружающей сре-
151 |
Рис. 2.48. Характеристика |
|
|
|
КПД машины |
ды. Наиболее чувствительными к повышению температуры являются обмотки. Температура нагрева обмоток не должна превышать некоторого значения, допускаемого классом изоляции. В начальной стадии нагрева температура изменяется практически по прямой линии, в этом случае тепло поглощается машиной. Далее прямая линия отклоняется в сторону оси абсцисс, ввиду рассеяния тепла в окружающую среду. Время, за которое машина нагревается до максимальной установившейся температуры, называется постоянной нагрева. Оно зависит от режимов работы: кратковременного, повтор- но-кратковременного, длительного. Тепловые расчеты машин приводятся в специальных курсах [ 5 ].
Вопросы для самоконтроля
1.Как устроен двигатель постоянного тока?
2.Каково назначение главных и добавочных полюсов в двигате-
ле?
3.Для чего нужен пусковой реостат в двигателе и каково его сопротивление в момент пуска?
4.Для чего нужен регулировочный реостат в цепи якоря?
5.Какими способами можно изменить направление вращения якоря двигателя?
6.Как можно регулировать частоту вращения якоря в сторону верхнего предела? Чем он ограничен?
7.Какие способы для уменьшения частоты вращения двигателя Вы знаете?
8.Как правильно определить положение щеток по отношению
кглавным полюсам?
9.Может ли двигатель работать в режиме генератора? Тормоза?
10.Можно ли, в принципе, питать двигатель постоянного тока от источника переменного тока?
11.Какая из механических характеристик двигателя с параллельным возбуждением отличается наибольшей жесткостью?
12.Почему при увеличении нагрузки двигателя его частота вращения уменьшается?
13.Почему нельзя включать двигатель последовательного возбуждения без нагрузки?
14.Что произойдет, если у двигателя параллельного возбуждения разомкнуть обмотку возбуждения?
15.Как устроен универсальный коллекторный двигатель и где его применяют?
152
16.Для чего в универсальном коллекторном двигателе секционируют обмотку возбуждения?
17.Какими способами можно регулировать частоту вращения универсального двигателя?
18.Потери в универсальном двигателе больше при постоянном или при переменном токе?
2.15.Двигатели постоянного тока с полупроводниковым коммутатором
Наличие коллектора и щеток в главной цепи обычного двигателя постоянного тока снижает надежность работы машины, ограничивает срок его службы. Применение полупроводниковых коммутаторов позволяет получить бесконтактные двигатели постоянного тока. Двигатели этого типа (вентильные) по своим энергетическим параметрам не уступают, а в ряде случаев превосходят обычные коллекторные машины. Так, они могут использоваться во взрывоопасной и агрессивной среде, имеют высокое быстродействие, точность позиционирования, большой диапазон изменения частоты вращения и т. д. Однако они имеют и недостатки. К ним можно отнести высокую стоимость, сложность системы управления и др.
Конструкция современного вентильного двигателя очень напоминает конструкцию синхронного двигателя. Статор вентильного двигателя похож на статор синхронного двигателя. В пазы статора (якоря) уложены обмотки. Обычно число обмоток или три (машина трехфазная), или четыре (четырехфазная). Ротор двигателя изготовляется с использованием постоянных магнитов и имеет обычно от двух до восьми пар полюсов, с чередованием северного и южного полюсов. В качестве магнитов используются сплавы из редкоземельных материалов, так как они позволяют получить высокий уровень магнитной индукции и уменьшить размеры двигателя. Необходимым элементом вентильного двигателя является датчик положения ротора. Он реализует обратную связь по положению ротора. Его работа может быть основана на разных принципах. Наибольшее распространение получили датчики положения ротора на основе датчиков Холла, а также фотоэлектрические датчики, так как они практически безынерционны и позволяют избавиться от запаздывания в канале обратной связи по положению ротора.
153
Система управления содержит силовые ключи – тиристоры или силовые транзисторы с изолированным затвором. Из них собирается инвертор напряжения или инвертор тока. Система управления ключами обычно реализуется на основе использования микроконтроллера.
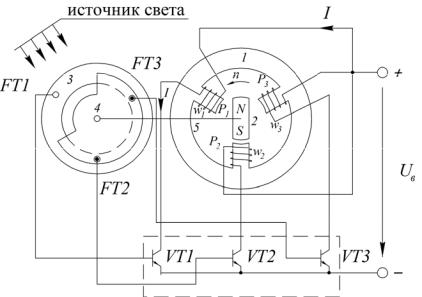
Упрощенная принципиальная схема двигателя постоянного тока с полупроводниковым коммутатором и однополупериодным управлением приведена на рис. 2.49. В эту схему входит трехфазный двигатель, включающий неподвижный статор 1 с тремя явно выраженными полюсами с расположенными на них обмотками W и ротор в виде постоянного магнита 2. Датчик положения ротора содержит три неподвижных фототранзистора FT1, FT 2, FT 3, расположенные под углом 120˚ друг к другу и размещенные на корпусе 3 датчика. Фототранзисторы поочередно освещаются источником света с помощью выреза в шторке 4, установленной на валу 5 двигателя. Управляемый коммутатор в рассматриваемой схеме состоит из трех транзисторов VT1,VT 2,VT 3, включенных последовательно с обмотками W1,W 2,W 3 двигателя. Управляющие сигналы на транзисторы поступают с соответствующих фототранзисторов, а сами транзисторы работают в ключевом режиме, т.е. имеют два устойчивых состояния: «открыт» и «закрыт». В положении, изображенном на рис. 2.49, южный полюс ротора расположен напротив неподвижного полюса статора Р2.
Рис. 2.49. Принципиальная схема двигателя с полупроводниковым коммутатором
При этом освещенный фототранзистор FT1 подает управляющий сигнал на транзистор VT1, который открывается. За счет протекания
154
тока по обмотке W1 полюс Р1 приобретает южную полярность, притягивает к себе северный полюс ротора, который начинает поворачиваться против часовой стрелки. Транзисторы VT 2 и VT3 закрыты и тока в обмотках W 2и W3 нет. При повороте ротора находящаяся на нем шторка затемняет фототранзистор FT1, обмотка W1 обесточивается. Одновременно с этим освещается фототранзистор FT 2, который включает транзистор Протекающий по обмотке W 2 ток создает южный полюс на неподвижном полюсе Р2 , который отталкивает южный плюс магнита ротора. Ротор продолжает движение. Далее затемняется фоторезистор FT 2 и освещается фоторезистор FT3. При этом открывается транзистор VT3 и включается обмотка W 3. Постоянный магнит ротора будет непрерывно вращаться.
Реальные двигатели постоянного тока с полупроводниковым коммутатором отличаются от рассмотренного двигателя разнообразием конструкций, схемами включения распределенной секционированной обмотки статора, более сложной схемой коммутатора и системы управления и т.д. Изменение направления вращения двигателя можно осуществить, применяя определенные схемотехнические решения. Для регулирования частоты вращения чаще всего используются частотно-импульсные способы.
2.16. Особенности работы двигателей от выпрямителей
В настоящее время широкое распространение получило питание коллекторных двигателей от выпрямителей или импульсных регуляторов.
При этом двигатели работают при напряжении, которое содержит, кроме основной постоянной составляющей, еще высшие гармонические напряжения.
Величина высших гармонических напряжения и создаваемых ими переменных токов даже в неуправляемых выпрямителях (выпрямительные элементы диоды) могут достигать довольно больших величин. Их значения еще более возрастают при использовании управляемых выпрямителей (выпрямительные элементы тиристоры) или импульсных регуляторов для изменения частоты вращения двигателей. Пульсирующие токи ухудшают коммутацию двигателей и увеличивают искрение под щетками; увеличивают потери и нагрев; вызывают появление вибраций и шума.
Двигатели, работающие от выпрямителей, получили название двигатели пульсирующего тока. Двигатели пульсирующего тока вы-
155
полняются, в основном, с независимым и последовательным возбуждением.
Вдвигателе с независимым возбуждением выпрямитель в цепи якоря обеспечивает изменение напряжения в широких пределах для регулирования частоты вращения двигателя. Выпрямитель, питающий обмотку возбуждения, выполняется по более простой схеме, чем выпрямитель в цепи обмотки якоря.
Пульсация напряжения на якоре и тока в якоре определяется,
восновном, индуктивностью обмотки якоря. Для требуемого снижения пульсации тока якоря, в его цепь включают сглаживающее устройство, например реактор (для машин большой мощности), так как индуктивность цепи якоря оказывается недостаточной.
При пульсирующем токе в обмотке возбуждения двигателя независимого возбуждения, виду большого числа витков и значительной индуктивности обмотки, пульсации тока незначительны, еще меньше пульсации магнитного потока главных полюсов.
Вдвигателе последовательного возбуждения параллельно обмотке возбуждения главных полюсов включают активное сопротивление, что позволяет снизить переменную составляющую тока в этой обмотке. Пульсации магнитного потока возбуждения минимальны.
Эффективной мерой уменьшения потерь в двигателях с пульсирующем током является выполнение их с шихтованной магнитной системой. Она также позволяет улучшить качество переходных процессов при изменениях нагрузки и напряжения.
2.17.Применение машин постоянного тока в различных отраслях хозяйства
Машины постоянного тока выпускаются преимущественно в виде серий. Ниже приводятся сведения по некоторым сериям машин отечественного и зарубежного исполнения.
Серии машин постоянного тока
Серия 2П является серией общего назначения. В рамках серии изготовляются как генераторы, так и двигатели. Электродвигатели постоянного тока серии 2П применяются для работы в широкорегулируемых электроприводах. Они выпускаются с высотой оси вращения 90…315 мм и с мощностями от 0,37 до 200 кВт. Электродвигатели выполняются с независимым возбуждением, напряжение которого составляет 110 В или 220 В, независимо от напряжения якоря. Пита-
156
ние обмотки возбуждения осуществляется от источника постоянного тока или тиристорного преобразователя напряжения.
Номинальные напряжения якоря 110, 220, 340 и 440 В. Полюса статора снабжены компенсационной обмоткой. Двигатели серии выпускаются в защищенном (IP22) или закрытом ( IP44) исполнениях.
Буква Н в обозначении типа двигателя фиксирует, что машина выполнена защищенной с самовентиляцией; буква Ф – защищенная машина с независимой вентиляцией от постороннего вентилятора; буква Б – закрытая машина с естественным охлаждением; буква О – закрытая машина с внешним обдувом от постороннего вентилятора; буква
Г– машина содержит встроенный тахометр. Режим работы двигателей серии S1.
Частота вращения от нуля до номинальной частоты вращения регулируется изменением напряжения на якоре, а свыше номинальной – ослаблением магнитного потока.
Условия эксплуатации: высота над уровнем моря до 1000 м, температура окружающей среды от -5 до +40 ˚С, влажность 80 % при температуре 25 ˚С.
Окружающая среда – невзрывоопасная.
В настоящее время серия 2П заменяется машинами постоянного тока серии 4П.
Серия 4П. Серия машин постоянного тока общепромышленного применения 4П с высотой оси вращения 80…280 мм содержит двигатели, генераторы, возбудители. Серия предназначается для комплектации бумагоделательных, подъемно-транспортных машин, буровых станков, вспомогательных агрегатов экскаваторов и выпускается на мощности 0,18…250 кВт. Номинальная частота вращения
500…3150 мин−1, максимальная 1800…3600 мин−1.
Двигатели изготовляются с параллельным и смешанным возбуждением. У всех машин серии имеется распределенная компенсационная обмотка. Магнитопроводы статора и ротора выполнены шихтованными. Режим работы продолжительный S1. Срок службы 15 лет.
Условное обозначение двигателей покажем на примере.
Пример 17. Дан двигатель марки 4ПНМ160М04. Расшифровка:
Первые цифра и буква означают порядок и название серии – 4П; Буква Н – защищенное исполнение IP23;
Буква М – модернизированная; Цифры 160 – высота оси вращения, мм;
Буква М – условная длина (вторая) сердечника якоря;
157
Цифра и буква 04 – климатическое исполнение и категория размещения.
Вусловном обозначении машин постоянного тока могут быть
идругие буквы.
Генераторы постоянного тока с высотой оси вращения 215…280 мм изготовляются на мощности 21…120 кВт, с числом обо-
ротов 1000…1500 мин−1.
Они выполняются со смешанным и параллельным возбуждением с самовозбуждением. В обозначении типа машины ставится буква Г, например 4ПНГ280S.
Возбудители с высотой оси вращения 225…280 мм производятся на мощности 11…48 кВт, с числом оборотов 750…1500 мин−1.
В аббревиатуре обозначения типа машины после букв 4П следует цифра и буква – 2В.
Крупные двигатели серии 4П для тяжелых условий эксплуатации выпускаются на мощности 110…800 кВт с частотой вращения 200…2000 мин−1. Двигатели изготовляются на напряжение
440 и 600 В.
Серия 5П. Двигатели предназначены для работы в регулируемых электроприводах, питаемых от полупроводниковых преобразователей, в том числе в приводах, оснащенных системами автоматического управления, контроля и диагностики с применением микропроцессорной техники. Серия включает двигатели как основного исполнения, так и модификации.
Двигатели основного исполнения серии 5ПБ и габаритов 100 – 160 мм изготовляются на мощности 0,55…8,5 кВт и напряжение 220 В. Номинальная частота вращения 1500 мин−1, максимальная
– 4000 мин−1, |
КПД 72…85,5 %. |
Конструктивное исполнение |
|
IMB34, IMB35. Машины закрытые, исполнение IP44 |
с естественным |
||
охлаждением. |
Возбуждение электродвигателей |
независимое 220 |
|
и 110 В. |
|
|
|
Модификации этой серии, наряду с |
применяемым напряжением |
||
220 В, выпускаются на напряжения 110 и 440 В.
Условное обозначение двигателей покажем на примерах
Пример 18. Дан двигатель марки 5ПБ132S1УХЛ42. Расшифровка:
5П – первые две буквы указывают серия машины;
158
Буква Б − означает закрытое исполнение IP44; Цифры 132 – высота оси вращения, мм;
S1 – первая длина;
УХЛ4 – климатическое исполнение и категория размещения; Цифра 2 − мощность электродвигателя.
Двигатели модифицированной серии 5ПН и габаритов 132…160 мм производятся на мощности 6…36 кВт и напряжение 220
и 440 В.
Номинальная частота вращения 750…3000 мин−1, максимальная –
1850…3500 мин−1. КПД 76,8…88 %. Электродвигатели имеют защищенное исполнение IP23.
Пример 19. Дан двигатель марки 5ПН160LУХЛ47.1 Расшифровка:
Буква Н – означает защищенное исполнение IP23; L – вторая длина.
Остальные цифры и буквы в обозначении такие же, что и примере 18.
Серия 6П. Электродвигатели серии 6П (аналоги серий 2П, 4П,5П) предназначены для создания регулируемых электроприводов с высокими динамическими и эксплуатационными показателями, а также комплектации бумагоделательных, красильно-отделочных подъемнотранспортных машин, полимерного оборудования, буровых станков и т.д.
Двигатели имеют диапазон регулирования частоты вращения 1:5 при регулировании тока возбуждения и 1:1000 при тиристорном регулировании напряжения в цепи якоря.
Двигатели с самовентиляцией изготовляются на мощность 13…123 кВт, напряжение 220 и 440 В. Номинальная частота вращения 500…1500 мин−1, максимальная 1500...3500мин−1. . Машины с независимой вентиляцией выпускаются мощностью 22…118 кВт, на напряжение 220 и 440 В. Номинальная частота вращения
1000…1500 мин−1, максимальная 1800…3500 мин−1.
Двигатели этой серии предназначены для работы в режиме S1. Серия П2. Серия включает машины постоянного тока большой мощности. Они используются в электроприводе прокатных станов, шахтных подъемников, гребных установок и других механизмов,
требующих регулировку частоты вращения.
159