

Краткая история развития микропроцессорных систем
1970 – Intel 4004 - первый 4-битный МП;
1972 – Intel 8008 - 8-ми битный;
1973 – Intel 8080 K580 (СССР) - аналог I8080;
Intel 8085 - помимо CPU были таймеры, контроллер прерываний и пр.;
1976 – Intel 8048 - первый контроллер;
1978 – Intel 8051 - MCS 51 (Micro Computer System)
Середина 90-х – семейства: Intel 151 и Intel 251 – 8 битные, но адресуемая память: 220 и 224.
1976 – I8086/I8088 (PCXT - IBM), К1816 (СССР) –аналог I8086.
EC1840 – CCCP – PCXT
1995 – (embedded) – разработаны однокристальные МК архитектуры Х86: 16- и 32-битные.
Основные требования к контроллерам
Низкая стоимость;
Высокая надежность;
Высокая степень миниатюризации;
Малое энергопотребление;
Работоспособность в различных температурных диапазонах в зависимости от применения:
Коммерческие: 0 … + 700С;
Расширенные: -40 … +850С;
Военные: -55 … +1550С;
Достаточная производительность для выполнения наборов функций
Архитектурные признаки контроллеров
Гарвардская архитектура (раздельная память для хранения данных (RAM) – энергозависимая и программ (ПЗУ) – энергонезависимая, сейчас популярна flash;
Интеграция в одном кристалле всех модулей, необходимых для управляющей ЭВМ;
По разрядности контроллеры бывают:
Четырехразрядные- самые простые и дешевые;
Восьмиразрядные –наиболее многочисленное семейство( оптимальное соотношение цены и возможностей) MCS51
Шестнадцатиразрядные iMCS96 , i80186(88) и другие, более производительные и дорогие.
32-разрядные – это обычно модификации универсальных МП, например i386, 486 и другие.
64-разрядные.
Режимы работы периферийных модулей современных контроллеров, их конфигурация настраиваются программно посредством загрузки кодов настройки в специальные регистры управления (SFR – special function register).
Развитие МК в рамках требуемой необходимости ведется в таких направлениях как:
Развитие архитектуры ЦПУ МК
Повышение тактовой частоты
Специализация команд и периферийных модулей МК
Повышение надежности
Переход на более низкие уровни напряжения и новые технологии и др.
Тема 1. Базовая структура микроконтроллерной (мк) системы управления
ПЛК – программируемые логические контроллеры, название промышленных контроллеров
P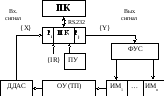 i
– входной порт;
i
– входной порт;
{X} – множество входных сигналов;
ДДАС – датчики дискретных и аналоговых сигналов;
Pj – выходной порт;
ИМ – исполнительные механизмы;
ФУС – формирование усилителей сигналов;
ОУ – объект управления;
ТП – технологический процесс;
IR – interrupt request (запрос прерывания);
ПУ – пульт управления (старт, стоп, индикация, клавиатура, и др.)
ПК связан с МК через последовательный интерфейс (RS232С и другие)
Микроконтроллер (МК) принимает множество информационных сигналов об объекте управления: цифровых {X} и аналоговых {U} от соответственно цифровых и аналоговых датчиков , вырабатывает множество управляющих сигналов {Y} в соответствии с законом управления и выводит их в исполнительные механизмы (ИМ).
Закон управления реализуется микроконтроллером на основе сигналов {X} от ОУ и информации с пульта управления (ПУ). МК содержит основные модули, обеспечивающие выполнение программ управления объектом, хранение данных, а также периферийные модули для подключения датчиков и исполнительных механизмов. С помощью ПУ пользователь получает возможность управлять работой микроконтроллерной системы: запускать и останавливать её, загружать в контроллер значения некоторых устaвок (констант), выводить на индикаторы информацию о состоянии объекта и т. п. С помощью последовательного канала связи RS 232 MК может организовать взаимодействие микроконтроллера с персональным компьютером (ПК) в режиме запрос-ответ.