

Режимы обмена информацией
|
Программный
|
С использованием ПДП (прямого доступа к памяти)
|
программным обменом управляет CPU, в ПДП – аппаратно
ПсП – последовательные порты (UART, USART) – universal sync/async receiver transmitter) – Intel; SPI – serial peripheral interface – Motorola.
RxD – receive data;
TxD – transmit data
КП – контроллер прерываний. Запросы бывают внешние и внутренние. В 51 – 2 внешних запроса INT0, INT1 – они поступают через линии порта Р3; и 3 внутренних – от устройств (от последовательного порта и др.)
Настройка КП:
Приоритеты запросов;
Запрет прерываний – индивидуально (маскирование):
2 регистра:Interrupt
Private (priority)
регистра:Interrupt
Private (priority)
Interrupt Enable
Режим обслуживания запросов (Например, в 59-м режимы фиксированных приоритетов, циклическое изменение приоритетов запросов)
Т/С – таймер/счетчик. Как правило, задачи управления в контроллере выполняются в режиме реального времени, т.е. в течение определенного интервала времени контроллер должен выполнить ввод, обработку и вывод (цикл).
Для разгрузки CPU в контроллер ввели модули Т/С, количество:от 2-х до 5-ти. Таймер формирует временной интервал.
Функции Т/С:
Запуск отдельных подзадач алгоритма управления через промежутки ∆t, называемые метками реального времени;
Подсчет внешних импульсов;
Формирование последовательных импульсов требуемой частоты на входе Т/С.
КПДП – контроллер прямого доступа к памяти. Содержит от 1 до 4 каналов
Direct request (DRQ) – формируется контроллером периферийного устройства. КПДП – формирует запрос в ЦПУ – отключить ЦПУ от магистрали (HOLD, HLDA – hold acknowledgement); подтверждение – DACK – direct memory access acknowledgement.
АЦП/ЦАП – аналоговые сигналы обычно поступают через один выделенный порт. Существует несколько регистров для настройки (CONF)
ПП, ПсП, КП, Т/С, КПДП, АЦП/ЦАП – периферийные модули.
В некоторых контроллерах есть специализированные процессоры.
Тема 3. Структура базового мк
Базовый МК семейства Intel 8051 включает следующие основные устройства:
ЦПУ (АЛУ, А, регистры и т.п.);
Резидентная память программ , мин. - 4Кбайт;
Резидентная память данных ( ОЗУ) , мин. - объемом 128 байт;
Четыре двунаправленных побитно настраиваемых восьмиразрядных орта ввода-вывода;
Два 16-разрядных таймера-счетчика;
Контроллер обработки 5 прерываний (запросы на прерывание от внешних устройств (не показаны);
Интерфейс для последовательного обмена информацией с другими микроконтроллерами или персональными компьютерами.

Тема 4. Организация и функционирование базового цпу
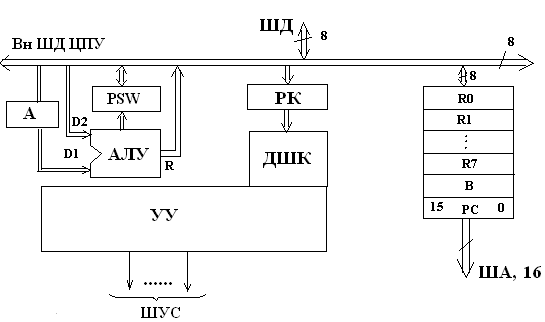
Блок обработки данных:
АЛУ –арифметико-логическое устройство;
R0 – R7 – регистры общего назначения;
В – специальный регистр в MCS 51 – используется для команд MUL (умножение) и DIV (деление).
MUL AB, где А – аккумулятор, В – специальный регистр;
DIV AB, А – делимое, В – делитель, в А – частное, в В – остаток.
В R0-R7 – можно хранить данные , константы (РОН, GP – general purpose);
R0 и R1 – можно использовать как регистры адреса памяти данных;
PC – Program Counter – программный счетчик. После питания или Reset PC = 0 – старт любой программы с нулевого адреса.
.
Модификации логических и арифметических операций над байтами
(с точки зрения расположения исходных данных, * - любая операция)
 -
одно данное всегда в аккумуляторе,
другое в регистре и результат записывается
всегда в аккумулятор. Режим адресации
регистровый (РА). ADD
A,
R2;
(A+R2
→ R2)
-
одно данное всегда в аккумуляторе,
другое в регистре и результат записывается
всегда в аккумулятор. Режим адресации
регистровый (РА). ADD
A,
R2;
(A+R2
→ R2) ;
М – данные в памяти данных. Можно
использовать две адресации:
;
М – данные в памяти данных. Можно
использовать две адресации:
ADD A, adr – прямой адрес памяти;
ADD A, @ R0; косвенная регистровая адресация
Предварительно в R0 надо загрузить адрес памяти. @ - признак косвенной регистровой адресации.
 -
режим непосредственной адресации.
-
режим непосредственной адресации.
Пример ADD A, #32H
32Н – данное;
# - означает, что это данное, константа. Если пропустим #, то А будет сложено с данными из 32 ячейки.
PSW – Program State Word ( F - регистр флажков)

CY – флажок переноса (carry) из старшего разряда (0 – перенос отсутствует, 1 – перенос есть)
AC – флажок переноса из третьего бита (старший бит младшей тетрады) - используется для десятичной коррекции младшей тетрады, при выполнении арифметической операции над двоично-кодированными десятичными данными (BCO – Binary Code Decimal). (0 – переноса нет; 1 – перенос есть). Выполняет коррекцию
СДК – схема десятичной коррекции.
F0 – нулевой флажок пользователя, не формируется автоматически. Можем сами использовать как надо. Устанавливаем в 0 или 1 сами.
S1, S0 – используется для выборки регистровых банков;
S1S0 Банк Рг
0 0 B0 (0-7)
0 1 B1 (8-16)
1 0 B2 (16-23)
1 1 B3 (24-31)
OV – overflow – формируется при арифметической операции при переполнение результата.
1-й бит не используется.
P – parity (паритет) четность(0) или нечетность(1) результата.
Можно адресовать регистр флажков на уровне байта или отдельных битов (PSW.3)