

3.2 Расчет реакций в кинематических парах группы 2-3
Группа 2-3 находится в равновесии. В этом случае справедливо следующее векторное равенство.
![]() ,
,
![]() ,
,
где Р43– реакция 4 (отброшенного для этой группы) звена на 3, Н. Величина этой реакции определена при решении предыдущей группы, направление же противоположно Р34.
G3– сила тяжести кулисы, Н, определяется по формуле:
![]() , (28)
, (28)
m3- масса четвертого звена, кг.
![]() (Н).
(Н).
РИ3 – сила инерции кулисы, определяется по формуле (29). Эта сила равна произведению массы на ускорения центра масс 3 звена, условно приложена в центре массы и направлена в сторону, противоположную ускорению этой же точки:
![]() , (29)
, (29)
![]() (Н).
(Н).
Р12– реакция кривошипа на кулисный камень, Н. Направление этой реакции совпадает с перпендикуляром к кулисе, а величина может быть найдена из суммы моментов относительно точки С.
![]() ,
,
![]() ;
;
![]() (Н).
(Н).
Р03– реакция стойки 0 на кулису, Н. Величина и направление этой реакции определяется после построения плана сил, определяется по формуле:
![]() , (30)
, (30)
Р14=133·8,89=1182,4 (Н).
Построение производится в масштабе с масштабным коэффициентом μР = 10 Н/мм.
3.3 Расчет исходного механизма (группа Ассура 0-1)
Подвижным звеном здесь является кривошип 1, который представляет собой зубчатое колесо с числом зубьев Z2, с установленным на нем пальцем В – шейкой кинематической пары 1-2.
Группа находится в равновесии. В этом случае справедливо следующее векторное равенство.
![]() ,
,
![]() .
.
Р21– реакции кулисы на кривошип. Величина определена при решении предыдущей группы. Направление её противоположно Р12;
G1– силы тяжести зубчатого колеса с пальцем В, определяется по формуле:
G1 = m1·g, (31)
m1 - масса первого звена, кг.
G1 = 9,5·9,8= 93,1 (Н)
РУР– уравновешивающая сила – реакции зуба отброшенной ведущей шестерни, число зубьев которойZ1. Величина уравновешивающей силы может быть найдена из суммы моментов относительно точки А.
![]() ,
,
![]() ,
,
![]() (Н). (32)
(Н). (32)
Р01– реакции стойки на кривошип. Полностью неизвестная величина. Определится после построения плана сил по формуле:
![]() , (33)
, (33)
![]() (Н)
(Н)
Построение производится в масштабе с масштабным коэффициентом μР = 10 Н/мм.
4 Кинематический анализ эпициклического механизма
Определить передаточное отношение замкнутого дифференциального редуктора i I IIаналитическим и графическим способом. Заданы числа зубьев всех колес.
Замкнутый дифференциальный редуктор получается путем замыкания дополнительной передачей одного из центральных колес и водила. Степень подвижности такого механизма равна единице.

Рисунок 2- схема редуктора
Таблица 1 – Исходные данные, числа зубьев
|
Сх. 3 |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Z1 |
? |
20 |
22 |
24 |
26 |
28 |
? |
28 |
26 |
24 |
|
Z2 |
22 |
? |
24 |
28 |
28 |
? |
30 |
? |
28 |
28 |
|
Z3 |
16 |
16 |
? |
24 |
? |
26 |
20 |
22 |
? |
18 |
|
Z4 |
56 |
60 |
68 |
? |
76 |
86 |
80 |
82 |
74 |
? |
|
Z5 |
? |
64 |
70 |
80 |
? |
90 |
84 |
84 |
? |
72 |
|
Z6 |
22 |
? |
25 |
? |
29 |
? |
29 |
? |
28 |
? |
|
Z7 |
16 |
18 |
? |
26 |
24 |
24 |
? |
24 |
22 |
20 |
Для дифференциальной части редуктора, согласно формуле Виллиса, имеем:
![]() , (34)
, (34)
где 1,4ин- угловые скорости соответствующих колес и водила;
z1, z2, z3, z4- числа зубьев соответствующих колес;
k – количество внешних зацеплений.
Для замыкающей передачи передаточное отношение i75будет равно
![]() . (35)
. (35)
откуда
![]() . (36)
. (36)
Заметим, что н=7,и4=5.
Тогда
![]() . (37)
. (37)
Подставим полученное выражение для н(37) в формулу (34) и получим
 . (38)
. (38)
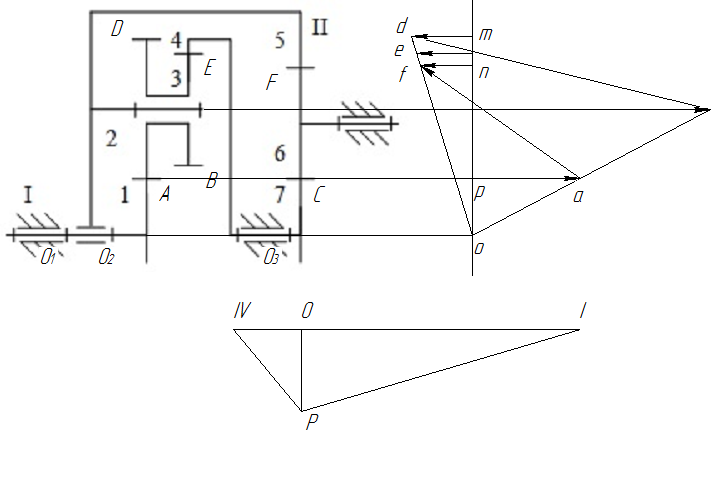
Рисунок 3- План угловых скоростей
 . (39)
. (39)
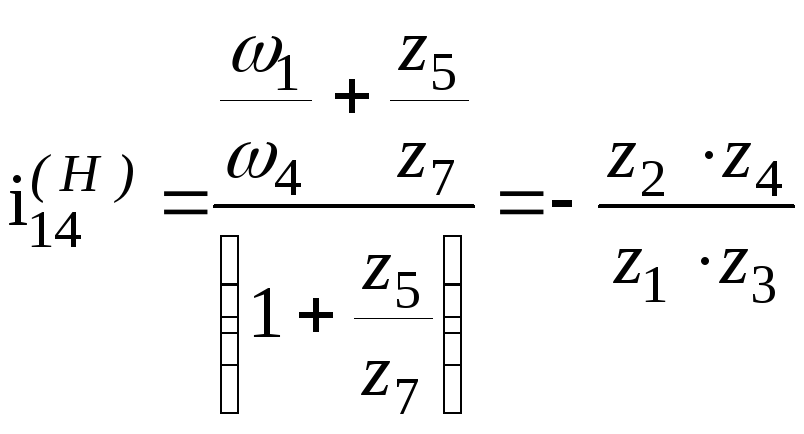
Откуда передаточное отношение i14будет равно
![]() . (40)
. (40)
Графический способ.
Рядом с кинематической схемой редуктора, выполненной в масштабе l=... м/мм проводим вертикальную прямую ОО6.
В нашем примере удобно начать с замыкающей
передачи. Зададимся линейной скоростью
точки А в виде вектора
![]() произвольной длины. Начало вектора -
вертикальная прямая ОО6. Соединим
конец вектора
произвольной длины. Начало вектора -
вертикальная прямая ОО6. Соединим
конец вектора![]() с точкой О и получим картину скоростей
колеса 7 и водила. Полюс зацепления колес
7 и 6 является общим. Ось О6неподвижна.
Соединим конец вектора
с точкой О и получим картину скоростей
колеса 7 и водила. Полюс зацепления колес
7 и 6 является общим. Ось О6неподвижна.
Соединим конец вектора![]() с точкой О6и получим картину
скоростей для 6 колеса. Перенесем полюс
зацепления В и получим вектор
с точкой О6и получим картину
скоростей для 6 колеса. Перенесем полюс
зацепления В и получим вектор![]() скорости точки В. Полюс зацепления колес
5 и 6 общий. Ось 5 колеса неподвижна.
Соединим точку О и конец вектора
скорости точки В. Полюс зацепления колес
5 и 6 общий. Ось 5 колеса неподвижна.
Соединим точку О и конец вектора![]() и получим картину скоростей для 5 и 4
колес.
и получим картину скоростей для 5 и 4
колес.
Спроецируем точки C и D на ось ОО6.
Соединим точки c и d получим картину
скоростей для 2 и 3 колес. Скорость точки
Е (вектор![]() )
определим спроецировав точку Е на
картину скоростей звена 2. Скорости
колес 1 и 2 в полюсе зацепления равны.
Соединим точку О с концом вектора
)
определим спроецировав точку Е на
картину скоростей звена 2. Скорости
колес 1 и 2 в полюсе зацепления равны.
Соединим точку О с концом вектора![]() и получим картину скоростей для колеса
1.
и получим картину скоростей для колеса
1.
Для определения передаточного отношения
перенесем полученные картины скоростей
зубчатых колес в общий полюс Р. Отрезок
![]() параллельно
картине скоростей 1 колеса (отрезок
параллельно
картине скоростей 1 колеса (отрезок![]() ),
отрезок
),
отрезок![]() параллельно
картине скоростей четвертого колеса
(отрезок
параллельно
картине скоростей четвертого колеса
(отрезок![]() ).
Измерим полученные отрезки
).
Измерим полученные отрезки![]() и
и![]() и
определим по формуле передаточное
отношениеi14 по формуле
и
определим по формуле передаточное
отношениеi14 по формуле
![]() (41)
(41)
Погрешность между расчетным значением передаточного числа i_Pи значением, полученным графическим путемi_Гсоставляет:
∆i=(i_P – i_Г)/i_P∙ 100% = 0%.