

АДАПТИВНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
.pdfАдаптивные системы автоматического управления |
33 |
изменялся во времени. Контур адаптации остается дееспособным и в том случае, если задание равно нулю (как в случае следящих систем), а работа всей системы направлена на отработку ненулевых начальных условий и (или) действия помехи F(t).
Задача цепей самонастройки состоит в том, чтобы вычислить текущие динамические характеристики объекта 1, изменяющиеся под воздействием неизвестного и непредсказуемого внешнего воздействия F, анализатор 6 определяет параметры обратной модели и вводит их в вычислитель 7.
Такие СНС отнесем в тип 3. Примеры таких систем имеются в литературе
[1, с. 23, рис. 1–8, 10, с. 51, 13, 14].
2.4. Системы с идентификатором модели объекта
В тип 4 «Системы с идентификатором модели объекта» выделим системы, содержащие вычислительное устройство, которое в силу своей структуры
и(или) алгоритма функционирования осуществляет идентификацию математической модели объекта. То есть на протяжении работы устройства и в то самое время, когда основной контур за счет главной обратной связи обеспечивает равенство выходной величины ее предписанному значению, дополнительный контур обеспечивает устойчивость (и наилучшую настройку) этого контура именно за счет уточнения параметров модели объекта, которые могут медленно изменяться во времени. Естественно, что темпы изменения параметров модели объекта должны быть существенно ниже темпов переходных процессов в системе, но это замечание справедливо для всех адаптивных систем, кроме систем, осуществляющих обратную связь по полному вектору состояния объекта. На рис. 7 показана самая общая структура СНС из книги [10, с. 51]. Блок идентификации, анализируя сигналы, поступающие на вход объекта и приходящие с его выхода, определяет математическую модель, которая задает зависимость между ними. Отметим, что поскольку объект – реальное устройство, не всякая математическая зависимость может соответствовать его математической модели. Математическая модель отыскивается в классе допустимых функций. Чем больше информации об объекте, тем проще устроен
иточнее работает блок идентификации. Блок самонастройки должен получать информацию о текущей модели объекта и на ее основе воздействовать на регулятор таким образом, чтобы изменить его параметры в нужную сторону и обеспечить наилучшие (или приемлемые) параметры основного контура управления. Недостатком структуры рис. 7 является лишь ее неполнота.
Примеры таких систем имеются в литературе [8, с. 395, 1, с. 11, с. 16, с. 57,
с. 64, с. 204, 2, с. 479, с. 485, 7, с. 440, 10, с. 68, с. 101]. Важный момент, на котором заостряют внимание авторы книги [1, с. 16], состоит в разделении масштаба времени функционирования разных частей системы. Хотя функционирование системы происходит в реальном времени, подстройка модели

34 |
В.А. Жмудь, Д.О. Терешкин,О.В. Прыткова |
|
|
f(t) |
X0 |
Y(t) |
X(t) |
|
Регулятор |
Объект |
|
Блок |
Блок |
|
самонастройки |
идентификации |
Рис. 7. СНС из книги [10, с. 51]
осуществляется в ускоренном времени. В устройстве модель строится на основании априорных данных и постоянно подстраивается, при этом расчет оптимального регулятора может осуществляться моделированием, при котором
в ускоренном времени просчитываются различные варианты управления,
выбирается оптимальный вариант. За время реального протекания процесса рассчитать переходные процессы с различными моделями можно многие сотни и тысячи раз в зависимости от того, во сколько раз отличается реальное время от времени моделирования. Поэтому регулятор выбирается из большого множества проанализированных вариантов, и он далее реализуется в реальном времени. Такой подход крайне продуктивен, на его основе будет в будущем строиться все больше адаптивных систем.
2.5. Системы с блоком прогноза выхода объекта
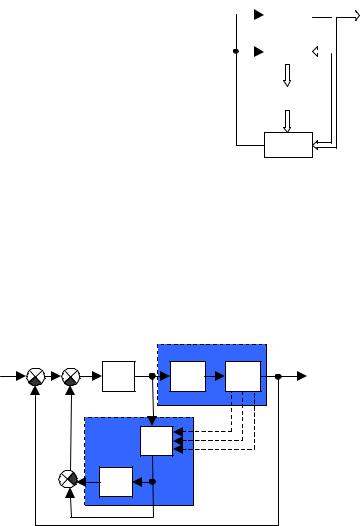
К типу 5 «Системы с блоком прогноза выхода объекта» можно отнести системы, в которых нежелательное влияние блока запаздывания в составе модели объекта или близкое к этому явлению резкое увеличение порядка наклона логарифмической амплитудно-частотной характеристики объекта компенсируется введением блока, осуществляющего прогноз выходного сигнала объекта. На рис. 8 показана укрупненная структурная схема одной из таких систем из книги [12, с. 178]. В данном случае не показана связь от блока управления к блоку прогноза. В этом случае блок прогноза едва ли способен предварительно вычислить будущий сигнал, который будет выработан объектом. Однако на схеме имеется связь с выхода блока управления (регулятора) 4 на блок идентификации 2, а также связь с блока идентификации 2 на блок прогноза 3. Из этого можно предположить, что прогноз выходного сигнала осуществляется, как минимум, с использованием выходного сигнала от блока
Адаптивные системы автоматического управления |
35 |
|||||||
V |
|
|
|
Y |
||||
1 |
||||||||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 8. Адаптивная система управления из книги |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
||||
|
|
|
|
|
|
|||
[12, с. 178]: |
|
|
|
|
|
|||
|
|
|
|
|
||||
1 – объект; 2 – блок идентификации; 3 – блок прогноза; |
|
|
|
|
|
|||
4 – блок управления |
3 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
4
идентификации, который, в свою очередь, формируется с использованием сигнала управления. На рис. 9 показана схема СНС из книги [1, с. 15]. В этой системе модель объекта можно условно разбить на два элемента – звено запаздывания и минимально-фазовую часть. Блок, реализующий работу в соответствии с этой моделью объекта, называемый «Модель объекта», также состоит из двух частей. Если порядок включения этих передаточных функций в объекте не существен, то в модели, используемой для формирования сигнала обратной связи, первым включается минимально-фазовое звено 4. От него замыкается отрицательная обратная связь, поэтому на регулятор приходит сигнал обратной связи с минимально-фазовой задержкой, после его изменения
V |
Объект |
Y |
|
2 |
|||
1 |
3 |
||
Модель |
4 |
|
|
объекта |
|
||
5 |
|
|
|
Рис. 9. СНС из книги [1, с. 15], использование модели для ком- |
|||
пенсации вредного влияния запаздывания: |
|||
1 – регулятор; 2 – звено запаздывания в составе объекта; 3 – мини- мально-фазовая часть объекта; 4 – модель минимально-фазовой части объекта; 5 – модель звена запаздывания объекта

36 |
В.А. Жмудь, Д.О. Терешкин,О.В. Прыткова |
на выходе регулятора он поступает от этой минимально-фазовой части модели объекта. К моменту формирования отклика от реального объекта остатки выходного сигнала от модели объекта перестают быть нужными.
Для их компенсации используется вычитающее устройство, на которое подается не только сигнал от минимально-фазовой части модели (на неинвертирующий вход), но и сигнал с выхода полной модели (на инвертирующий вход). Таким образом, пока отклик от изменения входного сигнала не распространился от входа объекта к его выходу вследствие задержки его на элементе 2, прогноз этого отклика формируется на элементе 4 и подменяет собой сигнал обратной связи. После того как отклик сформируется, прогноз его будет скомпенсирован откликом от полной модели.
Недостатком структурной схемы, показанной на рис. 8, является недостаточно подробная проработанность сигнала обратной связи от объекта к его модели. Если предполагается идентификатор, следовало бы внести его в функциональную схему и описать его работу. Без идентификатора такая схема будет неполной. Подавляющее большинство реальных объектов не обладают выходами, с которых бы можно было взять непосредственно параметры их модели.
2.6. Системы с адаптацией по ошибке управления
К типу 6 «Системы с адаптацией по ошибке управления» можно отнести системы, в которых качество работы основного контура оценивается по ошибке управления. Пример простейшей структуры такой системы приведен на рис. 10. Принцип действия такой системы может основываться на разных подходах. Например, если основной контур, составленный из регулятора 2 и объекта 1, не содержит интегратора, система в отсутствие адаптивного управляющего устройства 3 будет обладать статической ошибкой, но если в состав адаптивного устройства 3 входит интегратор, эта статическая ошибка будет устранена. При таком подходе совместное включение регулятора 2 и адаптивного устройства 3 может быть преобразовано в эквивалентный регулятор. Кажущееся адаптивным свойство устранения статической ошибки по отношению к статическому регулятору станет обычным свойством астатического регулятора.
V |
1 |
Y |
Рис. 10. СНС из книги [10, с. 68]: |
2 |
|
1 – объект; 2 – регулятор с переменной |
|
|
|
|
|
|
|
|
структурой; 3 – адаптивное управляющее |
3 |
|
|
устройство |
Адаптивные системы автоматического управления |
37 |
Принцип действия структуры может содержать и более сложный алгоритм. Например, появление в сигнале ошибки, анализируемой устройством 3, признак приближения к границе устойчивости может служить причиной изменения параметров регулятора, например, увеличение коэффициента дифференцирующего тракта, или уменьшение общего коэффициента усиления регулятора. Таким признаком может служить, например, резкое повышение в спектре сигнала ошибки гармонических компонентов в некотором частотном диапазоне. Система использует сигнал ошибки, обеспечивает его минимум, воздействуя на параметры или структуру регулятора, объекта и главной обратной связи. Другой пример СНС этого типа дан в книге [2, с. 483].
2.7. Экстремальные системы (настройки на экстремум)
К типу 7 «Экстремальные системы» можно отнести системы, в которых осуществляется настройка на экстремум какого-нибудь параметра. Поскольку системы, обеспечивающие настройку свойств замкнутой системы на экстремальное качество, уже отнесены нами к типу 2, то в данный тип 7 войдут только оставшиеся системы, которые обеспечивают перевод объекта в состояние вблизи экстремума. Многие авторы относят такие системы к адаптивным или самонастраивающимся, но, строго говоря, они таковыми не являются. В этих системах осуществляются два действия. Первое – это преобразование экстремальной характеристики в знакопеременную характеристику, нулевой выход которой соответствует экстремальному значению исходной характеристики. Второе – это обеспечение устойчивого управления в контуре с отрицательной обратной связью с применением этой преобразованной знакопеременной характеристики. Обобщенный пример такой системы дан в книге [1, с. 159]. Но эта система неполная. В системе должен присутствовать фазосдвигающий фильтр, обеспечивающий равенство фаз на двух входах синхронного детектора. В книге [1, с. 190] даны два примера систем, осуществляющих следящую настройку такого фильтра.
ЗАКЛЮЧЕНИЕ
В результате рассмотрения множества примеров СНС [1–18] на основе анализа наиболее существенных признаков можно предложить следующую классификацию самонастраивающихся систем.
1. Системы с адаптацией по помехе (или иным сигналам, косвенно или прямо описывающим изменение параметров объекта или условий его действий).
1.1. С эталонной моделью замкнутой системы.
38 |
В.А. Жмудь, Д.О. Терешкин,О.В. Прыткова |
1.2. С программным изменением параметров регулятора.
2.СНС со стабилизацией свойств основного контура без идентификации объекта.
2.1.С настройкой на экстремум свойств: а) с пробной девиацией в виде сигнала, вносимого в контур; б) с пробной девиацией параметров регулятора; в) без девиации.
2.2.С поддержанием заданных свойств контура: а) с доведением до автоколебаний; б) с введением пробных колебаний; в) без колебаний.
3.С эталонной моделью объекта (неуточняемой).
4.С идентификатором объекта или с уточняемой его моделью.
5.С блоком прогноза выхода объекта.
6.Системы с адаптацией по ошибке управления.
7.Экстремальные системы, переводящие систему в состояние вблизи экстремума.
Наибольший практический интерес вследствие наибольшей универсальности и наилучшего эффекта представляют, по-видимому, системы со стабилизацией основного контура (тип 2) и системы с идентификатором или с уточняемой моделью объекта (тип 4).
[1]Александровский Н.М., Егоров С.В., Кузин Р.Е. Адаптивные системы автоматического управления сложными технологическими объектами / под общей ред. Н.М. Александровского. – М.: Энергия, 1973. – 272 с.
[2]Куропаткин П.В. Теория автоматического управления: учеб. пособие для электротехн. спец. вузов. – М.: Высш. шк., 1973. – 528 с.
[3]Воронов А.А., Ким Д.П., Лохин В.М. и др.Теория автоматического управления: учеб. для вузов по спец. «Автоматика и телемеханика». В 2 ч. Ч. II. Теория нелинейных и специальных систем автоматического управления / под ред. А.А. Воронова. – 2-е изд., перераб. и доп. – М.: Высш. шк., 1986.
[4]Методы классической и современной теории автоматического управления: учебник. В 5 т. / под ред. проф. К.А. Пупкова и проф. Н.Д. Егупова. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2004. – Т. 5. Методы современной теории автоматического управления.
[5]Чаки Ф. Современная теория управления. Нелинейные, оптимальные
иадаптивные системы / пер. с англ.; под ред. Н.С. Райбмана. – М.: Мир, 1975.
[6]Атанс М.. Фальб П. Оптимальное управление. – М.: Машинострое-
ние, 1968.
Адаптивные системы автоматического управления |
39 |
[7]Власов К.П. Теория автоматического управления: учеб. пособие. – Харьков: Изд-во Гуманитарный центр, 2007.
[8]Ким Д.П. Теория автоматического управления. Т.2. Многомерные, нелинейные, оптимальные и адаптивные системы – 2-е изд., испр. и доп.– М.: ФИЗМАТЛИТ, 2007. – 440 с.
[9]Солодовников В.В. Статистическая динамика линейных систем автоматического управления. – М.: Физматгиз. 1960. – С. 520
[10]Антонов В.Н., Пришвин А.М., Терехов В.А., Янчевский А.Э. Адаптивные системы автоматического управления: учеб. пособие / под ред. проф. В.Б. Яковлева. – Л.: Изд-во Ленинград. ун-та. 1984. – 204 с.
[11]Самонастраивающиеся системы. Справочник / под ред. П.И. Чинаева. – Киев: Наукова думка, 1969.
[12]Кунцевич В.М., Лычак М.М. Синтез оптимальных и адаптивных систем управления. Игровой подход. – Киев: Наукова думка, 1985. – С. 178.
[13]Alberto Leva, GianAntonio Magnani. Detecting Process Variations in Low-End PID Autotuners. 2002 IFAC. 15th Triennial World Congress, Barcelona, Spain.
[14]Якупов О. Э. (Санкт-Петербургский государственный электротехнический университет «ЛЭТИ») Адаптивный электрогидравлический следящий привод летательного аппарата http://book.uraic.ru/files/spravka/105a.doc
[15]Бугров С.В., Жмудь В.А., Колкер А.Б. Применение метода разделения движения для стабилизации лазерного излучения // Сб. науч. тр. НГТУ. – Новосибирск, 2010. – № 2 (60). – С. 3–8.
[16]Mixed-Signal Control Circuits Use Microcontroller for Flexibility in Implementing PID Algorithms. Analog Devices. http://uk.farnell.com/static/findings/ DF10/findings10_aducs.htm .
[17]ТЕРРА электроника. Территория разработчиков электроники. http://terraelectronica.ru/
[18]Бугров С.В., Лисовой Р.А., Жмудь В.А., Колкер А.Б. Адаптивная система управления с использованием стабилизирующего эффекта девиации ко-
эффициента регулятора // Научный вестник НГТУ. – 2010. – № 1(38). – С. 157–160.
Жмудь Вадим Аркадьевич – доктор технических наук, заведующий кафедрой автоматики Новосибирского государственного технического университета. E-mail: oao_nips@bk.ru
40 |
В.А. Жмудь, Д.О. Терешкин,О.В. Прыткова |
Терешкин Денис Олегович – аспирант кафедры автоматики Новосибирского государственного технического университета.
E-mail: todin.dirihle@gmail.com
Прыткова Оксана Владимировна – соискатель кафедры автоматики Новосибирского государственного технического университета.
E-mail: ucit@ucit.ru
V.A. Zhmud, D.O. Tereshkin, O.V. Pritkova
Adaptive feedback control systems
The paper gives critical discuss of the different classifications of the adaptive feedback systems. The authors proposes a modern classification with examples, they discuss virtues and shortcomings of the different types and classes of self-tuning and adaptive systems. The paper gives an original structure of the self-tuning system and outlines the perspective view of this science direction.
Key words: adaptive systems, self-tuning systems, regulators