

КОНСПЕКТ ЛЕКЦИЙ ПО ДИСЦИПЛИНЕ «СИСТЕМЫ УПРАВЛЕНИЯ ХИМИКО- ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ». ЧАСТЬ 1
.pdf– время изодрома. Это время, в течение которого выходная величина ПИ-регулятора под действием интегральной составляющей изменилась на такую же величину, как и под действием пропорциональной.
ε
1
|
0 |
t |
|
|
|
||
h(t) |
|||
|
|||
kp
u0 
Тиз t
ПИ-регуляторы обладают достоинствами П- и И-регуляторов. Они имеют небольшое время регулирования (несколько больше, чем у П, но намного меньше, чем у И) и приводят регулируемую величину точно к заданному значению. В связи с этим ПИ регуляторы очень часто применяются при автоматизации производственных процессов.
3.6.Регуляторы с предварением
Взакон регулирования этих регуляторов входит дифференциальная составляющая.
ПД-регулятор с независимым параметрами настройки описывается уравнением:
u = kр ε + Tд + u0 , |
(3.5) |
где kр – коэффициент усиления регулятора, а Тд – время дифференцирования. Это параметры настойки ПД-регулятора.
41
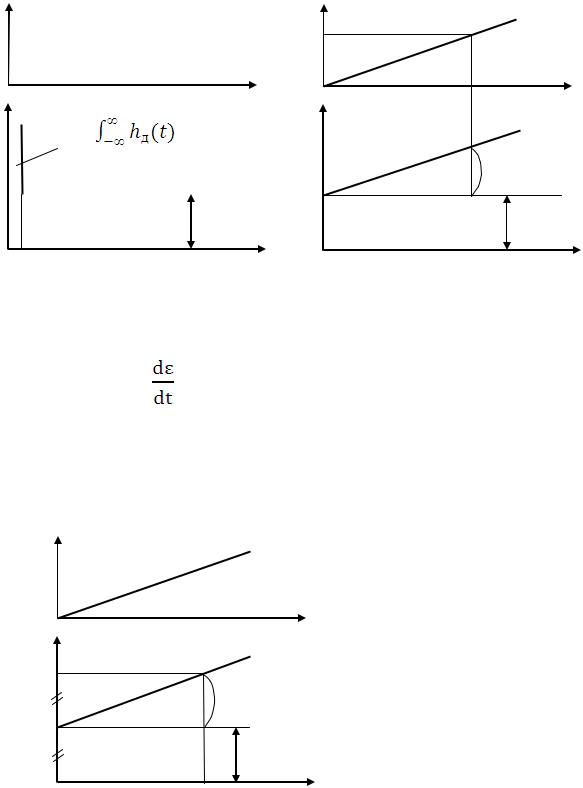
Динамические характеристики ПД-регулятора имеют вид:
|
|
ε |
|
|
|
|
|
|
|
ε |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
ε = kt |
|
|||||||||
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
t |
|
0 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
h(t) |
|
|
|
|
|
|
|
u |
|||||||||||||||
|
|
|
Тд = |
dt |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kp |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тдk |
|
|
|
|||||
|
u0 |
|
|
|
|
|
|
|
u0 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
t |
|
|
|
|
|
t |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
ПД-регулятор с зависимыми параметрами настройки |
||||||||||||||||||
описывается уравнением: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
u = kр (ε + Tп |
) + u0 , |
|
|
|
|
|
|
|
(3.6) |
|||||||||
где Тп – время предварения, то есть время, в течение которого выходная величина ПД-регулятора под действием пропорциональной составляющей изменяется на такую же величину, как и под действием дифференциальной.
ε
|
|
|
|
|
ε = kt |
||
|
|
|
|
|
|
||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
u |
|
|
|
|
||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
kpε = Тп k kp |
||
|
|
|
|
|
Тп k kp |
||
|
|
|
|
|
|||
u0 |
|
|
|
|
|
||
|
|
|
|
|
|||
|
Тп |
|
|
t |
|||
|
|
|
|
|
|
||
ПД-регуляторы обладают примерно такими же преимуществами и недостатками, что и П-регуляторы. Поэтому их обычно используют в том случае, когда исполнительное устройство – двигатель с постоянной
42
скоростью вращения. В этом случае исполнительное устройство формирует интегральную составляющую, и общий закон регулирования становится пропорционально- интегрально-дифференциальным.
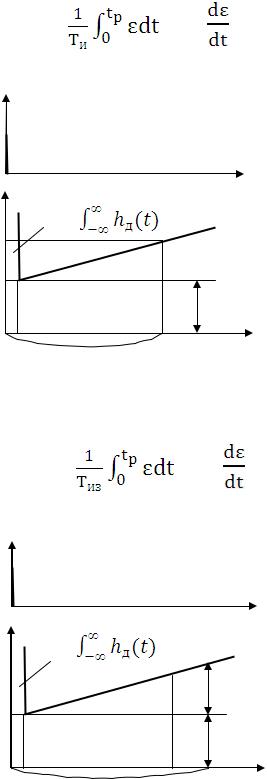
Закон регулирования пропорционально-интегрально-
дифференциального (ПИД) регулятора имеет вид:
|
u = kр ε + |
+ Tд |
+ u0 . |
(3.7) |
|||||||
|
Динамическая характеристика регулятора |
|
|||||||||
|
|
ε |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h(t) |
|
|
|
|
|
|
|
|
||
|
|
|
Тд = |
dt |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||||
1 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kp |
|
|
|
|
u0 |
|
Ти |
|
|
|
|
t |
|
||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Закон регулирования ПИД-регулятора с зависимыми |
|||||||||||
параметрами настройки: |
|
|
|||||||||
|
u = kр (ε + |
|
+ Tп |
) + u0 . |
(3.8) |
||||||
Соответствующая динамическая характеристика имеет вид:
ε
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
0 |
|
|
|
|
|
|
|
|
t |
||
|
|
|
|
|
|
|
|
|
|
|
||
h(t) |
|
|
|
|
|
|
||||||
|
|
|
|
Тп = |
|
dt |
|
|||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|||||||||
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kp |
|
|
u0 |
|
|
|
Тиз |
|
|
|
|
t |
|||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
43 |
||||
ПИД-регуляторы обеспечивают самое высокое качество регулирования. У них небольшое время регулирования (лишь немногим больше, чем у П-регуляторов) и небольшое отклонение регулируемой величины от заданного значения в процессе регулирования. Кроме того, они всегда приводят регулируемую величину точно к заданному значению. Недостатком ПИД-регуляторов является сложность конструкции.
Регуляторы с предварением применяют обычно на объектах с большим запаздыванием, чтобы уменьшить время регулирования (т.к. регулятор с Д-составляющей реагирует не только на отклонение параметра, но и на скорость изменения регулируемой величины).
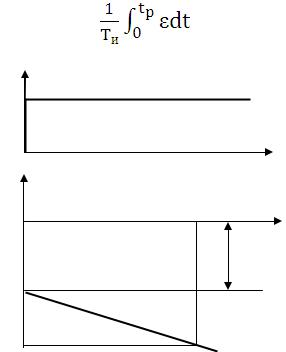
3.7. Регуляторы с обратной характеристикой
Для регуляторов с обратной характеристикой при увеличении входной величины выходная величина уменьшается. Например, для ПИ-регулятора с обратной характеристикой закон регулирования и переходная характеристика имеют вид:
u = – (kр ε + |
) + u0 . |
(3.9) |
ε
1
|
|
0 |
|
|
|
|
t |
||
|
|
|
|
|
|
|
|
||
h(t) |
|
||||||||
|
|
|
|
|
|
|
|||
|
|
|
Тиз |
|
|
|
|||
|
|
|
|
|
|
|
|||
|
u0 |
|
|||||||
|
|
|
|
|
|
|
t |
||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
44
4. Автоматические системы регулирования (АСР)
4.1. Классификация АСР
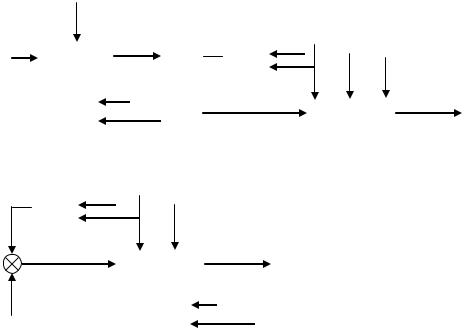
По принципу регулирования АСР делят на работающие по отклонению, по возмущению и комбинированные.
В системах, работающих по отклонению регулируемой величины от заданного значения (рис. 4.1 а), возмущение z вызывает отклонение текущего значения регулируемой величины х от ее заданного значения хзд. Автоматический регулятор сравнивает значения х и хзд и при их рассогласовании вырабатывает регулирующее воздействие u соответствующего знака, которое через исполнительное устройство подается на объект регулирования и устраняет это рассогласование. Системы регулирования по отклонению являются замкнутыми.
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
х |
|
|
|
|
|
|
|
|
zн |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z1 |
|
|
|
|
|
|
||||||||
|
|
|
ОР |
|
|
|
|
|
|
АРв |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z2 |
|
z1 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
х |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
хзд |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
АР |
|
|
|
|
|
|
|
|
ОР |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
zн |
|
|
|
z1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
АРв |
|
|
|
z2 |
|
|
|
Рис. 4.1. Принципиальные |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
схемы регулирования: |
||||||||||||
|
|
+ |
u |
|
|
|
|
|
|
|
|
|
|
|
х |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
ОР |
|
|
|
|
|
|
а – по отклонению; |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
хзд |
|
|
б – по возмущению; |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
АР |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в – комбинированные. |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При |
регулировании |
|
по возмущению (рис. 4.1 б) |
|||||||||||||||||||||||||
регулятор АРВ получает информацию о текущем значении основного возмущающего воздействия z1. При его несовпадении с номинальным значением zн регулятор формирует управляющее воздействие u, направляемое на
45
объект. В таких системах сигнал по контуру регулирования проходит быстрее, чем в системах по отклонению, поэтому возмущающее воздействие может быть устранено еще до появления рассогласования х и хзд. Обычно учитывается основное возмущение, например, состав исходной смеси. Основной недостаток таких систем: в контур регулирования не поступают данные о текущем значении регулируемой величины, поэтому ее отклонение от заданного значения может превысить допустимые пределы. Системы регулирования по возмущению являются разомкнутыми.
Комбинированный принцип регулирования заключается в совместном использовании регулирования по возмущению
иотклонению (рис. 4.1 в). Основное возмущение z1 компенсируется регулятором АРВ, а другие возмущения – регулятором АР, который реагирует на отклонение регулируемого параметра от заданного значения. Это позволяет обеспечить высокое качество регулирования.
По числу регулируемых величин АСР делят на одномерные и многомерные. Одномерные системы имеют одну регулируемую величину, многомерные – несколько регулируемых величин. Многомерные системы можно разделить на системы несвязанного и связанного
регулирования. В первых регуляторы не связаны между собой
иони используются, когда взаимное влияние регулируемых величин объекта друг на друга мало. В противном случае применяют системы связанного регулирования, в которых регуляторы различных величин одного объекта связаны между собой внешними связями.
По числу контуров прохождения сигналов одномерные АСР делят на одноконтурные (содержат один замкнутый контур) и многоконтурные (имеют несколько замкнутых контуров).
По назначению АСР подразделяются на системы автоматической стабилизации, системы программного управления и следящие системы.
46
Системы автоматической стабилизации
предназначены для поддержания регулируемой величины на заданном значении, которое устанавливается постоянным
(хзд = const).
Системы программного управления работают таким образом, что заданное значение регулируемой величины представляет собой заранее известную функцию времени хзд = f(t) и формируется специальным программным задатчиком. Такие системы используются при автоматизации процессов периодического действия или процессов, работающих по определенному циклу.
В следящих системах заданное значение регулируемой величины заранее неизвестно и зависит от внешнего независимого технологического параметра. Разновидностью таких систем являются системы регулирования соотношения расходов двух технологических потоков, например, топлива и воздуха для его сжигания.
По характеру регулирующих воздействий различают непрерывные АСР, релейные и импульсные. В первых их них используются автоматические регуляторы непрерывного действия; в релейных – двухпозиционные регуляторы; в импульсных – регуляторы, у которых управляющее воздействие представляет собой последовательность импульсов, подаваемых на исполнительное устройство.
Наряду с указанными АСР применяются также экстремальные системы. В этом случае оптимальный режим работы объекта характеризуется экстремальным (минимальным или максимальным) значением показателя эффективности процесса. Таким показателем может быть либо технологическая величина, либо одна из экономических характеристик, например, себестоимость продукции. Задача отыскания оптимального режима решается автоматическим поиском таких значений управляющих воздействий, которые соответствуют экстремальному значению показателя эффективности технологического процесса.
47

4.2. Показатели качества регулирования
Переходный процесс – это зависимость выходной величины (регулируемого параметра) АСР от времени при действии на систему внешнего возмущения. Любой автоматический регулятор предназначен для поддержания постоянства регулируемой величины и, при изменениях последней под действием возмущений, стремится вернуть ее к заданному значению. Однако у разных регуляторов переходный процесс даже с одним и тем же объектом будет различен. Качество переходного процесса количественно оценивается следующими показателями.
х |
|
|
|
x1 |
± ε |
|
|
х∞ |
x2 |
|
|
|
|
|
|
xдин |
хст |
|
|
|
|
|
|
хзд |
|
|
|
|
tp |
t |
|
|
|
|
|
Динамическая ошибка регулирования хдин |
– |
это |
|
максимальное отклонение регулируемой величины от |
|||
заданного значения во время переходного процесса: |
|
|
|
хдин = хmax – xзд . |
(4.1) |
Статическая ошибка регулирования хст – это разность между установившимся значением регулируемой величины после переходного процесса и ее заданным значением:
хст = х∞ – xзд . |
(4.2) |
Время регулирования tр – это время, в течение которого регулируемая величина достигает установившегося значения с некоторой заранее заданной точностью ε.
48
Перерегулирование φ представляет собой максимальное отклонение регулируемой величины от установившегося значения, выраженное в процентах от хст:
φ = |
100% . |
(4.3) |
Если статическая ошибка регулирования равна нулю, то перерегулирование находят так:
φ = |
100% , |
(4.4) |
где х1 и х2 |
– первая и вторая амплитуды |
колебаний |
регулируемой величины, направленных в противоположные стороны.
Интегральная квадратичная ошибка регулирования представляет собой квадрат площади между кривой переходного процесса и новым установившимся значением регулируемой величины:
I =  . (4.5)
. (4.5)
Чем меньше статическая и динамическая ошибки, время регулирования, перерегулирование и интегральная ошибка регулирования, тем выше качество переходного процесса.
На форму и качество переходного процесса АСР оказывают влияние свойства объекта регулирования, тип регулятора (закон регулирования) и степень его воздействия на объект, то есть параметры настройки регулятора.
Системы, в которых есть статическая ошибка регулирования, называют статическими АСР, а системы, где она отсутствует, – астатическими.
Из устойчивых переходных процессов (то есть процессов, в которых регулируемая величина приходит к постоянному значению) в качестве оптимального с технологической точки зрения выбирают один из трех типовых процессов (рис. 4.2): граничный апериодический (а),
49
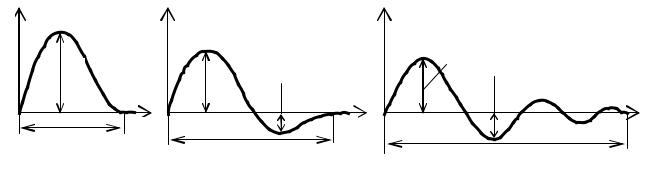
с 20%ым перерегулированием (б), интегральной ошибкой регулирования min
х |
а |
х |
б |
х |
|
x1 |
|
x1 |
|
|
|
|
x2 |
|
|
|
|
|
|
|
tp min |
t |
|
t |
|
|
tp |
|
|
|
|
|
|
сминимальной
 (в).
(в).
в
x1
x2
t
tp max
Рис 4.2. Типовые переходные процессы:
а– граничный апериодический; б – с 20%-ым перерегулированием;
в– с минимальной интегральной ошибкой регулирования.
Граничный апериодический процесс характеризуется отсутствием перерегулирования, минимальным общим временем регулирования и максимальной динамической ошибкой регулирования. При этом воздействие регулятора на объект минимально. Такой процесс используется в качестве оптимального в тех случаях, когда регулирующее воздействие может сильно повлиять на другие технологические величины объекта и когда допустимо значительное отклонение регулируемой величины от заданного значения (например, при регулировании уровня).
Процесс с 20%-ым перерегулированием характеризуется большим воздействием регулятора на объект. В этом случае динамическая ошибка регулирования уменьшается, время регулирования tр растет, а величина перерегулирования
составляет φ =  100% = 20%. Этот процесс выбирается в
100% = 20%. Этот процесс выбирается в
качестве оптимального в тех случаях, когда допустимо некоторое перерегулирование.
Процесс с минимальной интегральной ошибкой регулирования характеризуется значительным (до 40%) перерегулированием, большим временем регулирования и минимальной динамической ошибкой регулирования. Он
50