

КОНСПЕКТ ЛЕКЦИЙ ПО ДИСЦИПЛИНЕ «СИСТЕМЫ УПРАВЛЕНИЯ ХИМИКО- ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ». ЧАСТЬ 1
.pdfz
ТОУ
ИУ |
|
ИП |
ЛСА
УСО
УВМ
УСОП
Т-О
Рис. 1.2. Структурная схема системы управления:
ТОУ – технологический объект управления, ИП – измерительные преобразователи, ИУ – исполнительные устройства, ЛСА – локальные АСР, УСО – устройства связи с объектом, УВМ – управляющая вычислительная машина (компьютер), УСОП – устройство связи с оператором, Т-О – технолог-оператор.
2. Химико-технологические процессы как объекты управления
2.1. Задачи исследования
При исследовании процессов как объектов управления (ОУ) последние рассматриваются как преобразователи информации, то есть нас интересуют не материальные и тепловые потоки, а влияние одних величин ОУ на другие. Для наглядности используют схему информационных каналов, которая показывает влияние входных величин ОУ на выходные.
11
 z
z
u |
|
х |
Если бы не было возмущений z, то однажды зафиксировав управляющее воздействие u, можно было бы иметь постоянное значение выходной величины x.
При наличии возмущения z надо сформировать такое воздействие u, чтобы скомпенсировать действие z.
При исследовании объектов решают следующие задачи:
1.Задача управления: регулирование или оптимизация.
2.Выбор управляемых и управляющих величин.
3.Выявление степени влияния входных величин на выходные, то есть определение внутренних свойств объекта.
4.Выбор каналов управления.
Наиболее важной является последняя из указанных задач.
2.2. Классификация объектов регулирования
По количеству входных величин различают одномерные
имногомерные объекты управления (регулирования).
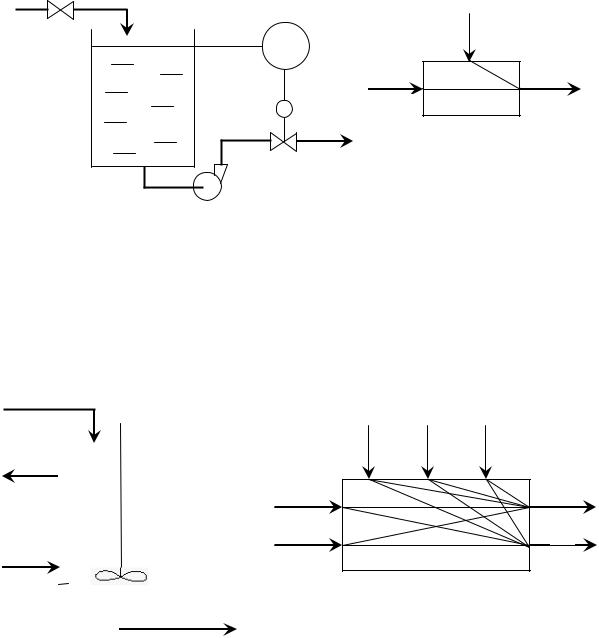
Уодномерных объектов протекание технологического процесса характеризуется одной выходной величиной. Для регулирования обычно достаточно иметь одну управляющую величину; возмущающих воздействий может быть несколько. Пример – гидравлический резервуар, в котором происходит накопление жидкости. Выходная величина – уровень жидкости в резервуаре L (LC – регулятор уровня). Обычно возмущающее воздействие – приток жидкости в резервуар
Fпр, а управляющее – расход жидкости на выходе из емкости Fp. В некоторых случаях может быть наоборот: возмущение
z = Fp, управляющее воздействие u = Fпр.
12
Fпр (z) |
LC |
z (Fпр) |
|
||
|
|
|
|
u |
|
L (x) |
(Fр) |
x (L) |
|
Fp (u) |
|
Выбор величин u и z определяется технологическими соображениями.
У многомерных объектов имеется несколько выходных величин. Управляющих воздействий и возмущений так же несколько. Пример – химический реактор, в котором протекает неизотермическая реакция:
Fн Qн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q, T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тн |
Тх |
Qн |
Fн |
|
Q |
Fх |
|
T |
Цель управления данного объекта – поддержание постоянного значения концентрации Q. Но и температуру Т тоже нужно стабилизировать, так как она влияет на ход реакции. Можно регулировать величину Q расходом сырья Fн, а Т – расходом хладоагента Fx, а можно и наоборот. Для выбора схемы регулирования необходимо производить расчет, так как многомерные объекты могут иметь неоднозначную структуру системы регулирования.
Объекты могут иметь сосредоточенные и распределенные параметры. В первом случае технологические параметры, характеризующие объект, одинаковы во всех
13

точках аппарата. В этом случае не имеет значения, в какой точке аппарата измерять выходную величину объекта. Примером может служить выпарной аппарат или сушилка с кипящим слоем.
Когда технологические параметры в различных точках аппарата различны (то есть для объектов с распределенными параметрами), задача управления заметно усложняется.
Примеры:
1.Барабанная сушилка, в которой влажность высушиваемого материала изменяется по длине аппарата.
2.Ректификационная колонна, в которой состав и температура продукта меняется от тарелки к тарелке.
В таких объектах измерение обычно проводят в той точке аппарата, где регулируемая величина изменяется наиболее заметно. Например, в ректификационной колонне – на контрольных тарелках в верхней или нижней части колонны.
2.3.Управляемые и управляющие величины
Управляемые величины – это те величины, которые необходимо регулировать в процессе работы; управляющие – это те воздействия, которые накладывают на объект для изменения управляемых величин. Выбор управляемых и управляющих величин зависит от конкретного ОУ (Т – температура, М – влажность, Q – концентрация, F – расход).
Аппарат |
Основная |
Косвенная |
Управляющая |
|
переменная |
переменная |
величина |
||
|
||||
Подогреватель |
Тж на |
– |
Fпара |
|
выходе |
||||
|
|
|
||
Сушильный |
Мтв.мат. |
Мсуш.агента, |
Fсуш.агента |
|
аппарат |
Ттв.мат. |
|||
|
|
|||
Ректификационная |
Qнкк |
Тнкк |
Fфлегмы |
|
колонна |
||||
|
|
|
||
Абсорбер |
Qобед.газа |
– |
Fабсорбента |
|
|
|
|
|
|
|
14 |
|
|
Если основную переменную измерить не удается, измеряют косвенную величину, тесно связанную с основной. Для каждой управляемой величины необходимо подобрать свою управляющую.
2.4. Статика объектов регулирования
Любой непрерывный технологический процесс может находиться в равновесном (стационарном, статическом) или в неравновесном (нестационарном, динамическом) режиме.
Равновесный (статический, стационарный) режим – режим, в котором входные, выходные и промежуточные величины ОР не меняются во времени.
Неравновесный (динамический, нестационарный) режим
– режим, в котором входные, выходные и промежуточные величины ОР переменны во времени.
Стационарный (статический) режим является частным случаем динамического режима и на практике встречается не часто. Тем не менее, изучение статического режима работы аппарата может оказаться полезным с точки зрения его
автоматизации. |
|
|
|
|
Поведение |
объекта |
в |
стационарном |
режиме |
характеризуется уравнениями статики или статическими характеристиками. Количество уравнений статики определяется количеством выходных величин объекта, количество статических характеристик – количеством информационных каналов.
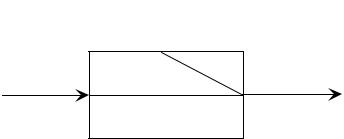
Статическая характеристика – зависимость между выходной и входной величинами объекта при стационарном режиме работы. Это может быть уравнение, график, таблица.
|
|
|
|
|
|
|
Данный объект имеет 2 информационных |
|
|
|
z |
|
|||
|
|
|
|
|
|
канала и, следовательно, 2 статические |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
х |
характеристики: |
|
u |
|
|
|
|
|
||
|
|
|
|||||
|
|
|
|
|
|
|
x = f1(z) u=0 ; x = f2(u) z=0 |
|
|
|
|
|
|
|
|
Уравнение статики – одно: x = f3(z,u).
15
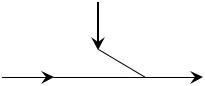
Зависимости между входными и выходными величинами могут быть линейными и нелинейными. Например, для газгольдера зависимость давления внутри аппарата от давления на его входе линейна.
|
Р |
Р |
Ратм |
Р0 |
|
Р0
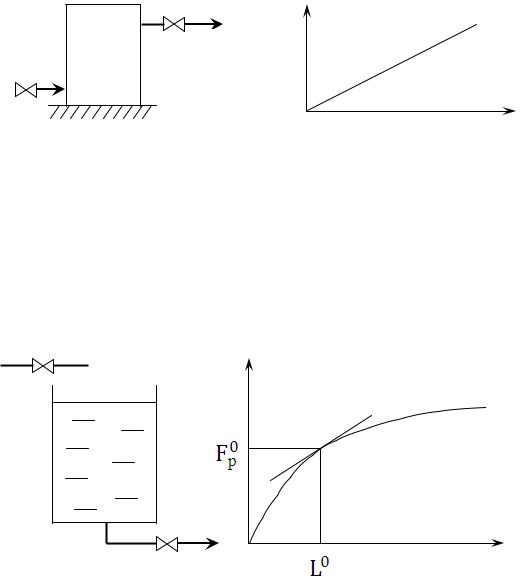
Но обычно статические характеристики ОР нелинейны. Так для гидравлического резервуара со свободным сливом жидкости зависимость между расходом вытекающей жидкости и уровнем в резервуаре описывается уравнением
Fр = αρa (a – площадь сечения вентиля на выходной линии резервуара); соответствующий график – парабола.
(a – площадь сечения вентиля на выходной линии резервуара); соответствующий график – парабола.
Fпр  Fp
Fp
L
Fp
L
При нормальном режиме работы аппарата нет необходимости знать всю кривую F = f(L). Надо знать поведение объекта в окрестности рабочей точки L0. Для упрощения проводят линеаризацию нелинейных зависимостей в этой точке. Для этого обычно используют разложение функции в ряд Тейлора, ограничиваясь первыми двумя членами ряда.
Для функции двух переменных z = f(x,y):
16
z z0 |
1 |
|
|
z |
|
(x x ) |
1 |
|
z |
|
|
( y y |
|
) |
|
1 |
2 z |
(x x )2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
1! |
|
x |
x , y |
0 |
1! |
y |
|
x |
, y |
0 |
|
. |
2! |
x2 (2.1) |
0 |
||||||
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
x |
, y |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
0 |
0 |
|
|
Используя |
формулу (2.1), |
линеаризуем |
|
зависимость |
|
|||||||||||||||||
Fр = αρa |
|
. Получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Fp = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2.2) |
|
|
В уравнении (2.2) умножим и разделим второе слагаемое на |
|
|||||||||||||||||||||
а0, а третье – на |
|
|
. Получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Fp = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
= |
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
, |
(2.3) |
|
|||
где F0 = αρa0 |
|
|
. Учитывая, что |
|
|
Fp = Fp – |
|
, получим |
|
|||||||||||||
окончательно: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Fp = К1 |
+ К2 |
, |
|
|
|
|
|
|
|
|
|
|
|
(2.4) |
|
|||||||
где К1 = |
, К2 = |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
По статическим характеристикам оценивают устойчивость объекта, то есть его способность самостоятельно приходить в состояние равновесия при изменении входной величины, и находят чувствительность информационных каналов. Чувствительность характеризует степень влияния входной величины объекта на выходную.
|
|
|
|
|
|
|
В |
данном |
случае |
|
|
|
|
z |
|
|
|
||||
|
|
|
|
объект |
|
имеет |
одно |
|||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||
u1 |
|
|
|
|
|
|
уравнение |
статики |
и три |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
х |
статические характеристики, |
|||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
каждая |
из |
которых |
имеет |
|
|
|
|
|
|
|
||||
u2 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
свою чувствительность. |
||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
17

Величины чувствительности необходимы для выбора каналов управления. В качестве управляющего выбирают канал с наибольшей чувствительностью.
Используя статические характеристики, можно решить несколько задач. Пусть нам известна зависимость концентрации дистиллята Q от расхода флегмы F, то есть статическая характеристика объекта – ректификационной колонны.
1.По регламенту задана величина Q0. Зная Q0, можно выбрать измерительный преобразователь, то есть его тип и пределы измерения.
2.По заданному значению Q0 можно найти
соответствующее значение управляющего воздействия u, то есть F0.
3. Зная F0, можно рассчитать и выбрать исполнительное устройство.
2.5. Динамика объектов регулирования
Реальные объекты обычно находятся в динамическом режиме, т.е. в неравновесном состоянии, характеризующемся непостоянством во времени входных, выходных и промежуточных величин объекта. Такой режим работы возникает под действием возмущений, а также при переходе с одного режима на другой, проводимом оператором; при пуске и остановке технологической установки.
18
Динамические режимы можно описать уравнениями динамики или динамическими характеристиками. Их количество такое же, как и в статике.
Динамическая характеристика – зависимость выходной величины ОР от времени при подаче на него типового возмущающего воздействия.
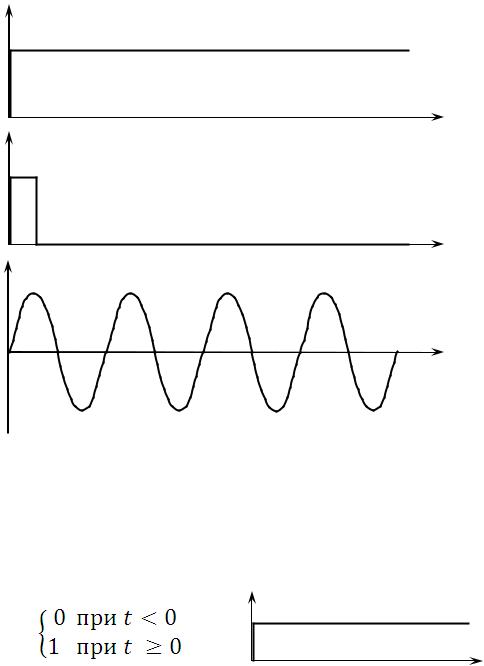
В теории регулирования рассматривается несколько типовых возмущающих воздействий: ступенчатое, импульсное, гармоническое (рис. 2.1). Чаще других на практике встречается ступенчатое возмущающее воздействие.
z
а
z |
t |
б
z |
t |
в
t
Рис. 2.1.Типовые возмущающие воздействия:
а – ступенчатое, б – импульсное, в – гармоническое.
При аналитическом исследовании ОР используют единичное ступенчатое возмущение z =1(t):
|
z |
1(t) = |
1 |
|
0 |
|
t |
19
При подаче на вход объекта единичного возмущения его выходная величина изменятся во времени. Такая кривая называется переходной характеристикой h(t).
При экспериментальном исследовании ОР получить единичное возмущение трудно. Поэтому задают другое по величине ступенчатое возмущение. Полученная кривая зависимости выходной величины ОР от времени называется
кривой разгона.
Задачи, решаемые с использованием динамических характеристик:
1.Оценка устойчивости объекта и определение чувствительности информационных каналов.
2.Выбор каналов управления с учетом динамических свойств ОР.
3.Выбор структуры системы управления (одноконтурная или многоконтурная).
4.Выбор алгоритма управления (закона регулирования).
5.Определение оптимальных значений настроечных параметров регулятора.
2.6.Свойства объектов регулирования
Уразных по своей физической природе объектов можно выделить общие динамические свойства. К ним относят самовыравнивание, емкость и запаздывание.
Самовыравнивание – способность ОР самостоятельно приходить в равновесное состояние после изменения его входной величины. Различают устойчивые, нейтральные и неустойчивые ОР (рис. 2.2). У устойчивых ОР скорость изменения выходной величины после подачи возмущения уменьшается, у нейтральных – остается постоянной, у неустойчивых увеличивается.
Устойчивость ОР связана с наличием в нем внутренней отрицательной обратной связи. У нейтральных объектов
20