

Avtomaticheskie_regulyatory
.pdfМинистерство образования Российской Федерации
Московская государственная академия тонкой химической технологии им. М.В. Ломоносова
Кафедра «Системы управления и автоматизация химико-технологических процессов»
Г.И.Лапшенков, В.И.Хоршев
АВТОМАТИЧЕСКИЕ РЕГУЛЯТОРЫ (законы регулирования)
Учебное пособие
Москва 2002
УДК 66.012-52
Рецензент – проф. Захаров М.К.
Лапшенков Г.И., Хоршев В.И. Автоматические регуляторы (законы регулирования). – М.: МИТХТ им М.В. Ломоносо-
ва, 2002, 24 с.
В учебном пособии приведены определения автоматических регуляторов, их классификация по законам регулирования, уравнения динамики, а также рассмотрены определения параметров настройки по переходным характеристикам. В заключение дано несколько контрольных заданий.
Учебное пособие предназначено для студентов IV курса дневного и вечернего отделений, изучающих дисциплину «Автоматизация технологических процессов». Материалы разработки могут быть полезны при самостоятельной работе студентов и сдаче рубежно-контрольных мероприятий по данной дисциплине.
Утверждено Библиотечно-издательской комиссией МИТХТ им. М.В. Ломоносова в качестве учебного пособия.
МИТХТ им. М.В. Ломоносова, 2002 г.
2
www.mitht.ru/e-library

Введение
Целью настоящей разработки является знакомство студентов с аналоговыми регуляторами (регуляторами непрерывного действия), широко используемыми при автоматизации технологических объектов.
1. Автоматические регуляторы и законы регулирования
Автоматическим регулятором называется устрой-
ство, обеспечивающее в системах автоматического регулирования (АСР) поддержание технологической величины объекта, характеризующей протекание в нем процесса около заданного значения путем воздействия на объект.
Заданное значение может иметь постоянную величину (в системах стабилизации) или изменяться по определенной программе (в системах программного регулирования).
Структурная схема регулятора может быть представлена как совокупность двух элементов (рис.1): элемента сравнения 1 и элемента 2, формирующего алгоритм (закон) регулирования.
узд |
у |
|
|
Рис. 1. Структурная |
|||
|
Закон |
u |
|||||
|
|
|
|
|
регулирования |
|
схема регулятора |
|
1 |
|
2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|||||
На элемент сравнения 1 поступают два сигнала у и узд, пропорциональные, соответственно, текущему и заданному значениям регулируемой величины. Сигнал у формируется измерительным преобразователем, а сигнал узд – задатчиком или программным устройством.
3
Сигнал рассогласования
y yзд |
(1) |
поступает в элемент 2, который вырабатывает выходной сигнал регулятора, направляемый на исполнительное устройство.
Регуляторы могут быть с прямой и обратной характеристикой. Если с увеличением у относительно узд выходная величина u увеличивается, то регулятор имеет прямую характеристику, а если уменьшается, то – обратную характеристику. Переход с прямой характеристики на обратную и наоборот в регуляторах осуществляют при помощи специального переключателя.
Отрицательную обратную связь в замкнутом контуре АСР формируют посредством применения регуляторов с прямой или обратной характеристикой.
Законом регулирования называется зависимость между изменением выходной величины регулятора u и рассогласованием текущего у и узд значений регулируемой величины.
По законам регулирования аналоговые регуляторы делят на пропорциональные, пропорциональноинтегральные, пропорционально-дифференциальные и пропорционально-интегрально-дифференциальные.
2. Пропорциональные регуляторы
Закон регулирования пропорционального регулятора имеет вид
u kp u0 |
(2) |
где kp - коэффициент передачи (усиления) регулятора; u0-
выходная величина регулятора в начальный момент времени.
4
www.mitht.ru/e-library

Коэффициент передачи регулятора kp является па-
раметром настройки регулятора. Изменяя kp , можно изме-
нить степень воздействия регулятора на объект. Структурная схема П-регулятора представляет зве-
но с большим коэффициентом усиления k 1 (k=10000 40000), охваченное по отрицательной обратной связи усилительным звеном с коэффициентом koc.
|
|
|
|
|
|
|
u |
|
|
|
|
||
|
|
k1 1 |
|
|
|
|
Рис. 2. Структурная |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
схема П-регулятора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|
|
|
|
|
функция П-регулятора, приведённого |
||||||||||
|
|
|
|||||||||||
|
Передаточная |
||||||||||||
на рис. 2, равна |
|
|
|
|
|
|
|
||||||
|
|
|
W(s) |
k1 |
|
|
|
|
1 |
kp |
(3) |
||
|
|
|
|
|
1 |
|
|||||||
|
|
|
|
1 kk |
|
|
|
kос |
|
||||
|
1 |
|
ос |
|
|
||||||||
|
k |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
Из выражения (3) видно, что чем меньше коэффициент kос (степень воздействия отрицательной обратной связи), тем больше изменяется выходная величина регулятора при определенном рассогласовании.
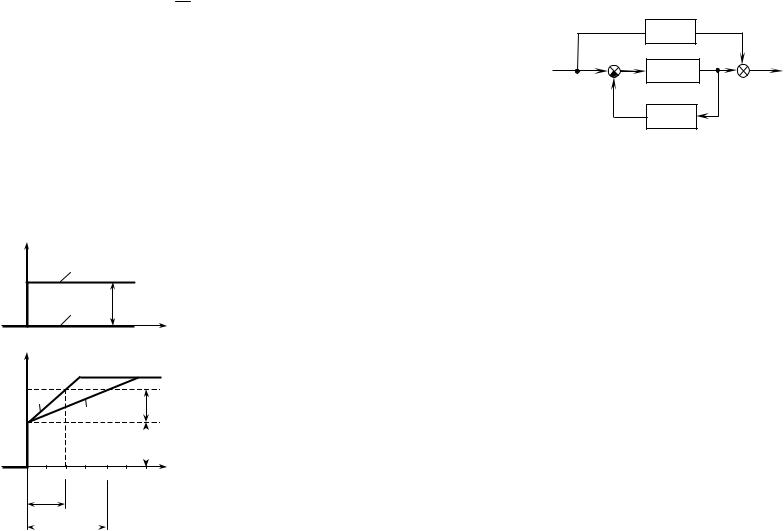
Динамические характеристики П-регулятора при ступенчатом изменении входного сигнала и различных значениях kp приведены на рис. 3.
Согласно уравнению (2) выходной сигнал регулятора для зависимостей 1 и 2 будет равен:
u1 1(25 0) 50 75%,
(3)
u2 2(25 0) 50 100%.
К достоинствам пропорционального регулятора следует отнести его безынерционность (или быстродействие). Это выражается в том, что его выходная величина изменяется одновременно с изменением входной величины.
5
Оптимальное значение параметра настройки регулятора, как и для других регуляторов определяется выбранным переходным процессом АСР, заданными параметрами качества регулирования и устанавливается в зависимости от свойств объекта регулирования.
,% |
|
25 |
у |
|
|
0 |
узд |
|
u,%
2
100
1
75
t
Рис. 3. Ступенчатое изменение характеристики П- регулятора при различных kp: 1–(kp=1); 2–( kp=2).
u0=50
t
Недостатком П-регулятора является то, что при работе в замкнутом контуре АСР регулятор не возвращает регулируемую величину к заданному значению, а приводит к новому положению равновесия со статической ошибкой регулирования пропорциональной коэффициенту передачи по каналу «возмущающее воздействие – регулируемая величина» и обратно пропорциональной kp. Увеличение kp при работе на объектах с запаздыванием приводит к неустойчивому режиму работы АСР.
3. Пропорционально-интегральные регуляторы
Выходная величина пропорционально-интеграль- ных регуляторов (ПИ-регуляторов) изменяется под действием суммы двух составляющих: пропорциональной и интегральной.
6
www.mitht.ru/e-library
Закон регулирования ПИ-регуляторов с независимыми параметрами настройки описываются равенством:
t
u kp T1 dt u0 , (4)
и 0
где kp – коэффициент передачи регулятора; Ти – время интегрирования.
По физическому смыслу Ти – это время, в течение которого изменение выходного сигнала регулятора под действием интегральной составляющей достигает ступенчатого изменения его входной величины.
ПИ-регулятор имеет два параметра настройки – kp и
Ти.
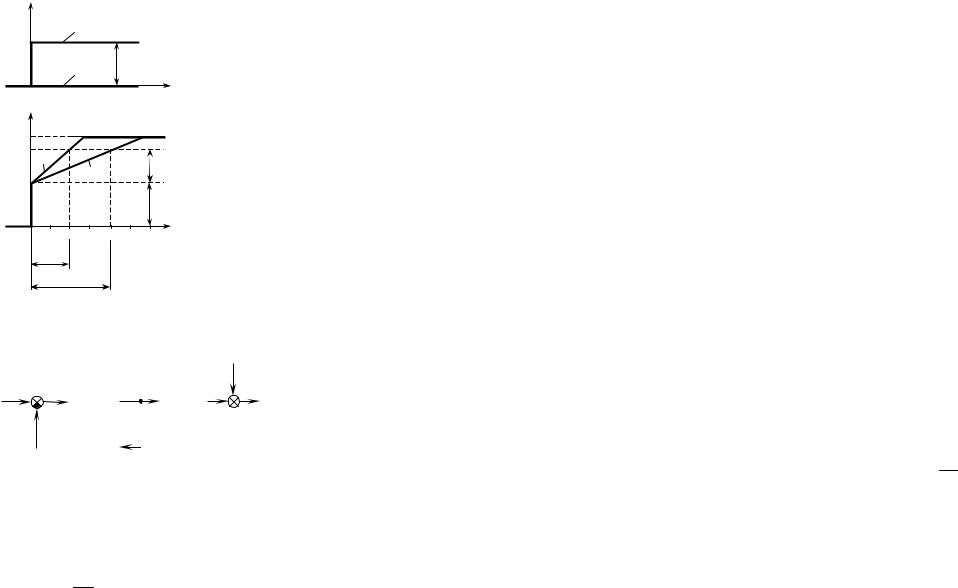
Динамическая характеристика ПИ-регулятора (рис.4) представляет сумму пропорциональной и интегральной составляющих.
,% |
|
|
|
|
|
|
|
|
|
|
|
25 |
|
|
у |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
узд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4. Ступенчатое изме- |
|||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
t |
||||
u,% |
|
|
|
|
|
|
нение |
и |
динамические |
||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
характеристики ПИ-регу- |
||||
100 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
лятора |
с |
независимыми |
||
95 |
1 |
|
2 |
|
|
|
|
параметрами |
настройки |
||
70 |
|
|
|
|
|
|
при различных Ти: |
||||
|
|
|
|
|
|
kp |
1–(Ти1=10 мин, kp=0,8); |
||||
u0=50 |
|
|
|
|
|
2–(Ти2=20 мин, kp=0,8). |
|||||
|
|
|
|
|
|
|
|||||
0 |
5 |
10 |
15 |
20 |
25 |
30 |
t, мин |
|
|
|
|
|
Ти1 |
|
|
|
|
|
|
|
|
|
|
|
|
Ти2 |
|
|
|
|
|
|
|
|
|
7
Из рисунка видно, что с увеличением Тu степень воздействия интегральной составляющей уменьшается.
Структурная схема ПИ-регулятора с независимыми параметрами настройки приведена на рис. 5.
|
1/Tиs |
|
Рис. 5. Структурная |
|
k 1 |
u |
схема ПИ-регулятора с |
независимыми пара- |
|||
|
1 |
|
метрами настройки |
|
|
|
kос
Передаточная функция этого регулятора описывается уравнением
W(s) |
k1 |
|
1 |
|
1 |
|
1 |
k |
p |
|
1 |
(5) |
|
|
|
|
T s |
T s |
|||||||||
1 k k |
|
T s k |
ос |
|
|
|
|
||||||
|
1 ос |
|
и |
|
|
|
и |
|
|
|
и |
|
|
В промышленности широко используются также регуляторы с зависимыми параметрами настройки (изодромные регуляторы), уравнение динамики которых имеет вид:
|
1 |
t |
|
0 |
|
|
u kp |
|
dt u |
|
, |
(6) |
|
T |
|
|||||
|
из 0 |
|
|
|
|
|
где kp–коэффициент передачи регулятора;
Тиз–время изодрома регулятора.
По физическому смыслу Тиз – это время, в течение которого при ступенчатом изменении входной величины выходная величина регулятора под действием интегральной составляющей изменяется на такую же величину, как и под действием пропорциональной составляющей.
Динамические характеристики изодромного регулятора приведены на рис.6.
8
www.mitht.ru/e-library
,% |
|
|
|
25 |
у |
|
|
|
|
|
|
0 |
узд |
|
|
|
Рис. 6. Ступенчатое изме- |
||
|
|
||
|
|
t |
|
u,% |
|
нение и динамические |
|
|
|
||
|
|
характеристики изодром- |
|
100 |
|
|
|
|
|
ного регулятора при раз- |
|
90 |
1 |
kp |
личных Тиз: |
70 |
2 |
|
1–(Тиз1=10 мин, kp=0,8); |
|
|
kp |
2–(Тиз2=20 мин, kp=0,8). |
u0=50 |
|
|
|
|
|
|
0 5 10 15 20 25 30 t, мин
Тиз1
Тиз2
Структурная схема изодромного регулятора представлена на рис. 7.
|
|
|
|
|
|
|
|
|
Рис. 7. Структур- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
ная схема изо- |
|
k 1 |
|
|
1/Tизs |
|
дромного регуля- |
||||
|
|
1 |
|
|
|
|
|
|
тора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Передаточная функция приведенной структурной схемы находится по равенству
W(s) |
k1 |
|
1 |
|
|
1 |
|
1 |
|
1 |
|
1 |
|
|
|
|
|||||||
|
|
|
|
|
|||||||
|
1 k1kос |
Тизs |
|
kос |
kос Тизs |
||||||
Обозначая 1 через kp, получим
koc
9
1 |
|
kp |
|
|
1 |
(7) |
||
W(s) |
|
|
|
kp 1 |
|
|
|
|
kp |
Тизs |
Т |
|
|||||
|
|
|
изs |
|
||||
ПИ-регуляторы по сравнению с П-регуляторами обладают меньшим быстродействием. Вместе с тем, вследствие отсутствия статической ошибки при работе в замкнутом контуре АСР,они обеспечивают более качественное регулирование. Это обуславливается тем, что интегральная составляющая регулятора будет действовать до тех пор, пока рассогласование не станет равным нулю.
4.Регуляторы с опережением
Крегуляторам с опережением ( с воздействием по производной) относят пропорционально-дифференциаль- ные и пропорционально-интегрально-дифференциальные (ПД- и ПИД-) регуляторы.
Закон регулирования ПД-регулятора с независимыми параметрами настройки описывается уравнением
u k T |
d |
u0 , |
(8) |
|
|
||||
p |
д |
dt |
|
|
где Тд –время дифференцирования.
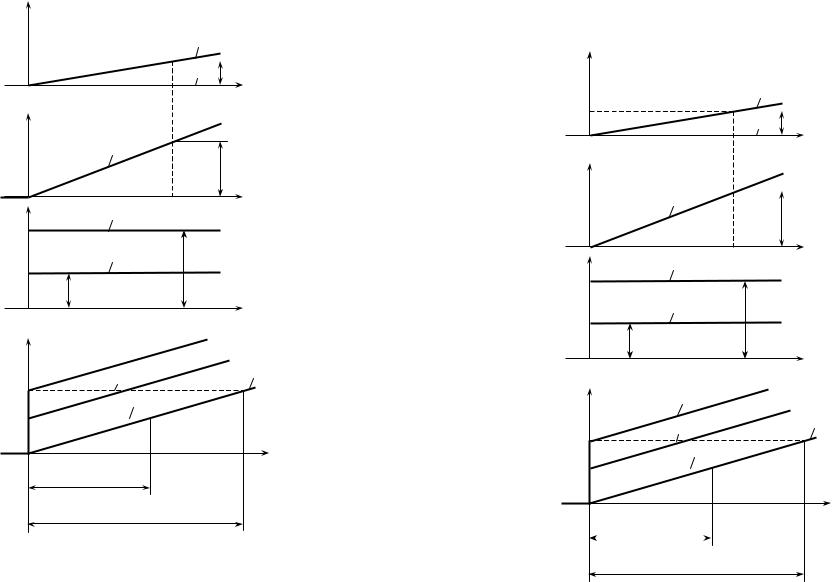
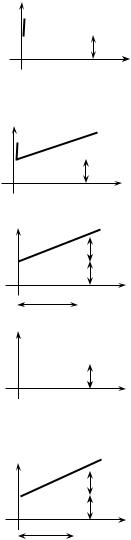
Динамическая характеристика ПД-регулятора, описываемого уравнением (8), при подаче на его вход входно-
го сигнала, изменяющегося с постоянной скоростью d , dt
представлена на рис. 8.
Уравнение ПД-регулятора с зависимыми параметрами настройки имеет вид
u k |
|
T |
d |
u0 , |
(9) |
|
p |
|
|
||||
|
п |
|
|
|
||
|
|
|
dt |
|
|
|
где Тп – время предварения.
10
www.mitht.ru/e-library
|
у |
||
|
|
|
|
0 |
узд |
||
|
t |
|
|
un
un
kp
u0 0
|
uд |
|
uд2 |
|
t |
|
|
|
|
uд1 |
|
|
|
|
|
|
|
|
||
u0 0 |
Тд1 |
d |
Тд2 |
d |
||
|
|
|
||||
dt |
dt |
|||||
|
|
|
|
|
|
|
t
u 2
 1 uд2
1 uд2 
uд1
u0 0
Tд1/kp
Tд2/kp
Рис. 8. Динамические характеристики ПД-регулятора с независимыми параметрами настройки при различных Тд: 1–(kp,Tд1); 2–(kp,Tд2)
un
t
По физическому смыслу Тп показывает, что по сравнению с пропорциональной составляющей выходной
11
величины регулятора uп выходная величина uпд достигает тех же значений с опережением по времени, равном Тп. Это явствует из приведенной на рис. 9 динамической характеристики регулятора, описываемого уравнением динамики
9.
|
|
|
|
|
у |
|||||
|
|
|
|
|
|
|
||||
=0 |
|
|
|
узд |
||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
t |
|
|
|||
|
un |
|
|
|
|
|
|
|
|
|
|
|
un |
|
|
|
|
|
|||
u0 |
kp |
|||||||||
|
|
|
||||||||
|
|
|
t |
|||||||
|
uд |
uд2 |
||||||||
|
|
uд1 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
||||
u0 0 |
kpТп1 |
d |
kpТп2 |
d |
||||||
|
|
|
|
|||||||
dt |
dt |
|||||||||
|
|
|
|
|
t |
|||||
u 2
1
Тд2  Тд1
Тд1
u0 0
Tп1
Tп2
Рис. 9. Динамические характеристики ПД-регулятора с зависимыми параметрами настройки при различных Тп:
1–(kp,Tп1); 2–(kp,Tп2)
un
t
12
www.mitht.ru/e-library

На рис. 10. приведена структурная схема ПДрегулятора с зависимыми параметрами настройки.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
k1 1 |
|
|
|
|
|
|
Рис. 10. Структурная |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
схема ПД-регулятора |
|
|
|
|
|
k2 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
с зависимыми пара- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
Tпs |
|
|
|
|
|
|
|
|
|
метрами настройки |
|||
|
Передаточная функция ПД-регулятора с такой |
|||||||||||||||||
структурной схемой равна |
|
|
|
|
||||||||||||||
W(s) |
|
|
k1 |
|
|
|
|
|
|
1 |
|
|
1 |
(1 Тпs) kp(1 Тпs) (10) |
||||
1 |
k1k2 |
|
1 |
|
|
k2 |
k |
2 |
||||||||||
|
|
|
|
|
|
|||||||||||||
|
Tпs 1 k1 |
|
Тпs 1 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||
Закон регулирования ПИД-регулятора с независимыми параметрами настройки имеет вид
u kp
u kp
1 |
|
t |
|
d |
|
|
0 |
|
|
|
|
0 |
dt Tд |
|
|
u |
|
|
(11) |
||
Ти |
|
dt |
|
|
||||||
1 |
|
t |
|
|
d |
|
0 |
|
||
|
|
|
dt Tп |
|
|
|
u |
|
(12) |
|
Тиз |
|
|
|
|
|
|||||
0 |
|
dt |
|
|
|
|||||
Структурная схема ПИД-регулятора с зависимыми параметрами приведена на рис. 11.
|
|
|
|
|
|
Tпs |
|
|
Рис. 11. Структур- |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
u |
ная схема ПИД- |
|
k 1 |
|
|
|
1/Tизs |
|
регулятора с зави- |
|||
|
|
|
|
|
|
|
|||
|
|
1 |
|
|
|
|
|
|
симыми парамет- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рами настройки |
|
|
kос |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Передаточная функция такого регулятора описывается уравнением
13
|
k1 |
|
1 |
|
|
|
1 |
|
|
(13) |
|
W(s) |
1 |
Т |
пs |
kp 1 |
Т |
пs |
|||||
|
Тизs |
Тизs |
|||||||||
|
1 k1kос |
|
|
|
|
|
|
||||
Характеризуя быстродействие ПИД-регулятора необходимо отметить, что если воздействия интегральной и дифференциальной составляющих одинаковы, то его быстродействие приближается к быстродействию П-регулятора. Если воздействие дифференциальной составляющей больше, чем воздействие интегральной составляющей, то регулятор будет действовать быстрее, чем П-регулятор. В случае же большего воздействие интегральной составляющей быстродействие ПИД-регулятора будет приближается к быстродействию ПИ-регулятора.
При работе в замкнутом контуре АСР введение дифференциальной составляющей в закон регулирования вызывает уменьшение скорости изменения регулируемой величины, уменьшение времени регулирования и динамической ошибки регулирования, а также интегральной ошибки регулирования.
Уравнения динамики, настроечные параметры, переходные характеристики и их графики для различных типов регуляторов приведены в табл. 1.
5. Регуляторы и контроллеры
При автоматизации химико-технологических произ-
водств используются регуляторы и контроллеры.
Регуляторы представляют собой технические средства с жесткой функциональной структурой, обеспечивающей реализацию закона регулирования.
Контроллеры – специализированные вычислительные устройства, обеспечивающие выполнение закона регулирования программно. При изменении программы алгоблок контроллера реализует выбранный алгоритм регулирования.
14
www.mitht.ru/e-library

Регуляторы могут быть пневматическими или электрическими, а контроллеры – электрическими.
Впневматических регуляторах изменение входных
ивыходных сигналов находится в диапазоне 20 100 кПа. В регуляторах системы «СТАРТ» реализуются ПИ и ПИДзаконы регулирования с независимыми параметрами настройки. В этих регуляторах в качестве одного из параметров настройки используют величину, обратную коэффициенту передачи, называемую пределом пропорциональности
|
1 |
100% |
(14) |
|
kp
Предел пропорциональности показывает, в каком диапазоне изменяется входной сигнал регулятора при изменении его выходного сигнала от 0 до 100%. Он характеризует степень отрицательной обратной связи в пропорциональном регуляторе. Чем меньше , тем силнее воздействие регулятора на объект.
В электрических регуляторах и контроллерах используются следующие диапазоны изменения сигналов: 0– 5 мА; 0–20 мА; 4–20 мА и 0–10 В.
Электрические регуляторы и алгоритмы регулирования регулирующих микропроцессорных контроллеров описываются законами с зависимыми параметрами настройки.
Наличие определенного диапазона выходного сигнала регулятора обуславливает его ограничение по величине. Поэтому в случае значительного рассогласования или при установке определенных значений настроечных параметров выходной сигнал регулятора будет принимать предельные значения.
15
6. Пример
Пневматический ПИ-регулятор с прямой характеристикой имеет независимые параметры настройки, равные
=80%, Ти=20 мин.
Определить изменение выходной величины регулятора Рвых за 10 мин., если входной сигнал ступенчато принял значение Рвх=64 кПа при начальных значениях Рвх0 и
Рвых0 равных 60 кПа.
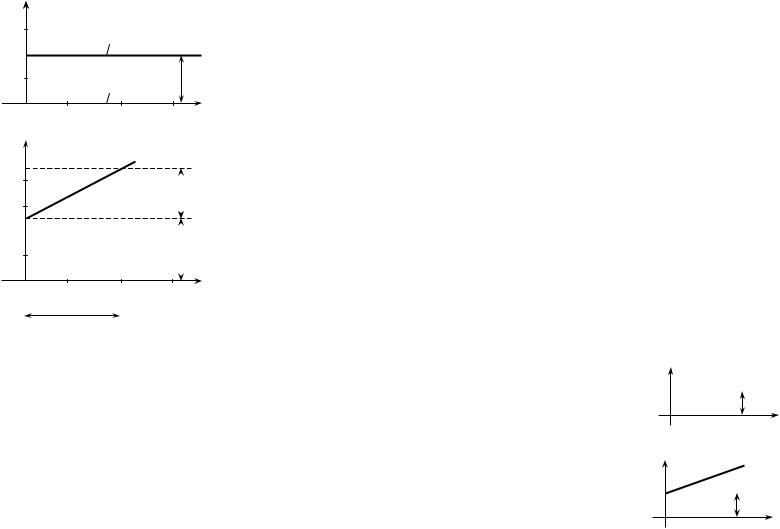
Построить динамическую характеристику регулято-
ра.
Решение
Выходная величина пневматического ПИрегулятора изменяется по закону
Р |
k |
|
P |
|
1 |
Р |
t P0 |
, |
(15) |
|
Ти |
||||||||
вых |
|
p |
вх |
|
вх |
вых |
|
|
где kp 1 100% 1 100% 1,25;
80
приращение входной величины равно:
Pвх Рвх Рвх0 64 60 4 кПа.
Подставляя в уравнение (15) значения Рвх, Рвх0 , kp и Ти, получим искомое значение
Рвых 1,25 4 1 4 10 60 67 кПа. 20
Изменение выходного сигнала регулятора за 10 ми-
нут равно: Рвых Рвых Рвых0 67 60 7 кПа. Динамическая характеристика регулятора приведе-
на на рис. 12.
16
www.mitht.ru/e-library
Рвх,Рзд,кПа
|
|
66 |
|
|
|
Рвх |
|
|
|
||
|
|
64 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
Р |
0 |
62 |
|
|
|
Рзд |
|
Рвх |
|
||
Р |
|
|
|
|
|||||||
|
вх |
|
зд60 |
|
|
|
|
|
|
Рис. 12. Динамиче- |
|
|
|
0 |
10 |
20 |
30 |
t,мин |
|||||
|
|
ская характеристика |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Рвых,кПа |
|
|
|
|
|
регулятора при |
|||||
|
|
|
|
|
0 |
||||||
|
|
|
|
|
|
|
|
|
|
|
Р вых=60 кПа; |
|
|
68 |
|
|
|
|
|
|
|
Рвх=4 кПа; kp=1,25; |
|
|
|
66 |
|
|
|
|
|
|
Ри Tи=20 мин. |
||
|
|
|
|
|
|
|
|
|
|
||
|
|
64 |
|
|
|
|
|
|
Рп |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Р0 62 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
вых 60 |
|
|
10 |
20 |
30 t,мин |
|
|||
|
|
|
0 |
|
|
||||||
|
|
|
|
|
|
Ти |
|
|
|
|
|
Таблица 1. Уравнения и характеристики аналоговых регуляторов
Закон регулиро- |
Уравнение динамики |
|
Настроечные па- |
||||||
вания |
|
|
раметры |
||||||
|
|
|
|
|
|
|
|
||
П |
|
u k |
|
u0 |
|
kp – коэффициент |
|||
|
|
|
|
p |
|
|
|
|
передачи |
С независи- |
|
|
|
1 |
t |
|
|
kp – коэффициент |
|
мыми пара- |
|
|
|
|
0 |
передачи |
|||
метрами на- |
ПИ |
u kp |
|
0 |
dt u |
|
Ти – время интегри- |
||
Tи |
|
||||||||
стройки |
|
|
|
|
|
|
|
|
рования |
17
С независи- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
kp – коэффициент |
||||
мыми пара- |
ПД |
|
u k T |
|
|
u0 |
|
|
|
|
передачи |
|||||||||||||||||||||
метрами на- |
|
|
|
|
|
|
|
Тд – время диффе- |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
p |
|
|
д |
dt |
|
|
|
|
|
|
|
|
|
||||||||||
стройки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ренцирования |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kp – коэффициент |
||
|
|
|
|
|
|
|
|
|
1 |
|
t |
|
|
|
|
|
|
|
d |
|
|
|
|
передачи |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
Ти – время интегри- |
|||||||||||
|
ПИД |
u kp |
|
|
dt Tд |
|
|
|
|
|
u |
|
|
рования |
||||||||||||||||||
|
T |
|
|
dt |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
и |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тд – время диффе- |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ренцирования |
||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
t |
|
|
|
|
|
|
|
|
|
kp – коэффициент |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
передачи |
|||||||||||
|
ПИ |
u kp |
|
dt u0 |
|
|
||||||||||||||||||||||||||
|
Tиз |
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тиз – время изодро- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ма |
||
С зависи- |
|
|
|
|
|
|
|
|
|
T |
|
|
d |
|
|
|
|
|
|
|
|
|
kp – коэффициент |
|||||||||
ПД |
u k |
|
|
|
|
u0 |
|
|
|
|
передачи |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
мыми пара- |
|
|
|
|
|
|
|
p |
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
Тп – время предва- |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|||||||
метрами на- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рения |
||
стройки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kp – коэффициент |
||
|
|
|
|
|
|
1 |
|
t |
|
|
|
|
|
|
|
|
|
d |
|
0 |
передачи |
|||||||||||
|
ПИД |
u kp |
|
|
|
dt Tп |
|
|
u |
|
Тиз – время изодро- |
|||||||||||||||||||||
|
|
T |
|
dt |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
и 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ма |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тп – время предва- |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рения |
||
Переходная ха- |
График переходной характеристи- |
|
Передаточная |
|||||||||||||||||||||||||||||
рактеристика |
|
|
|
|
|
|
|
|
|
|
ки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
функция |
|||||
|
|
|
h(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
h(t)=kp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kp |
|
|
|
|
|
|
|
|
|
W(s)=kp |
||||
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
arctg |
|
|
|
|
|
1 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Ти |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
h(t) kp |
T |
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kp |
|
|
|
|
|
|
|
|
|
W(s) kp |
T s |
|
|||
|
и |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
и |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
18
www.mitht.ru/e-library
|
|
|
|
|
|
|
|
|
|
h(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тд |
|
(t)dt |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
h(t) kp Tд (t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(s) kp Tдs |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kp |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
Т |
д |
|
|
|
(t)dt |
|
|
|
1 |
|
|||||||||
|
|
|
|
|
|
|
|
h(t) |
|
|
1 |
|
|
|
|
|
||||||||||||||||
h(t) kp Tи t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(s) kp Tиs |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
arctg |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Ти |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Tд (t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kp |
Tдs |
|
|
|
|||||||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
h(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kp |
|
|
|||||||||||
h(t) kp |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(s) kp |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kp |
|
|
|
|
||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
||||||||
|
|
|
|
|
0 |
|
|
Тиз |
|
|
|
|
|
|
|
|
t |
|
|
|||||||||||||
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T s |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
из |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
из |
|
|
|||
|
|
|
|
|
|
|
|
|
h(t) |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тп |
k |
|
|
|
(t)dt |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
h(t) kp 1 |
|
|
|
|
|
|
|
|
|
|
p |
|
W(s) kp(1 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kp |
|||||||||||||||||
Тп (t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тпs) |
|
|
||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тп |
k |
|
|
|
(t)dt |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
h(t) kр |
1 |
|
h(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(s) kp |
1 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kp |
1 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kp |
|
|||||||||||
|
|
|
|
t Тп (t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тпs |
||||||
|
|
|
0 |
|
|
Тиз |
|
|
|
|
|
|
|
|
t |
Tизs |
||||||||||||||||
|
Tиз |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
19
7. Контрольные задания
Задание 1. Электрический аналоговый ПИ-регулятор (РБА-Ш, системы АКЭСР) имеет прямую характеристику.
Определить изменение выходной величины регулятора за 15 минут при ступенчатом увеличении входного сигнала на 1 мА, если параметры настройки регулятора соответственно равны: kp=2; Тиз=20 мин.
Построить графики изменения входной и выходной величин регулятора, если его входная величина, задание и выходная величина в начальный момент времени равны 10 мА (диапазон изменения - 0 20 мА).
Ответ: 3,5 мА.
Задание 2. Электрический импульсный регулятор в комплекте с однооборотным исполнительным механизмом постоянной скорости реализуют ПИ-закон регулирования с зависимыми параметрами настройки.
Определить изменение выходной величины регулятора за 10 мин при ступенчатом увеличении входной величины на 2 мА. Параметры настройки регулятора: kp=2;
Тиз=40 мин.
Построить графики изменения входной и выходной величин регулятора, если его входная величина и задание равны 4 мА (диапазон изменения - 0 20 мА), а выходная величина равна 54° (диапазон - 0 270°).
Ответ: 67,5°.
Задание 3. Алгоритм РАС (регулирование аналоговое стандартное) регулирующего микропроцессорного контроллера реализует ПИД-закон регулирования.
Определить изменение выходной величины контроллера через 10 мин после ступенчатого уменьшения входной величины на 2 В, если настроечные параметры ал-
20
www.mitht.ru/e-library