

КОНСПЕКТ ЛЕКЦИЙ ПО ДИСЦИПЛИНЕ «СИСТЕМЫ УПРАВЛЕНИЯ ХИМИКО- ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ». ЧАСТЬ 1
.pdf2.8. Экспериментальное определение свойств ОР
Аналитический метод исследования объектов целесообразно использовать в том случае, когда можно составить их математическое описание. Но это возможно не всегда. Кроме того, могут возникнуть сложности при определении коэффициентов модели. Тогда свойства объекта находят экспериментально. Схема эксперимента такова:
|
|
z |
|
|
|
x |
|
ИУ |
ОР |
||||||
|
|
|
|
|
|||
|
|
|
|
|
|||
|
|
|
|
|
|
|
ИП1 ИП2
|
|
|
|
|
|
ПУ |
|
|
|
|
РП |
|
|
|
|
||
|
|
|
|
|
|
Рис. 2.4. Экспериментальное определение свойств ОР:
ОР – объект регулирования, ИП – измерительные преобразователи, РП – регистрирующий прибор, ПУ – пульт управления,
ИУ – исполнительное устройство.
Быстродействие измерительных преобразователей ИП1 и ИП2, исполнительного устройства ИУ и регистратора РП должно быть на порядок больше, чем у ОР.
Вначале приводят ОР в стационарное состояние. Затем с помощью пульта управления через ИУ на объект наносят возмущение, обычно ступенчатое. Т.к. эксперимент проводят на работающем оборудовании, то возмущение наносят небольшое, обычно несколько процентов от номинального значения регулируемой величины. Затем наблюдают за выходной величиной ОР до тех пор, пока она не станет постоянной или не будет меняться с постоянной скоростью. Как правило, проводят несколько опытов с разным начальным значением выходной величины x.
31
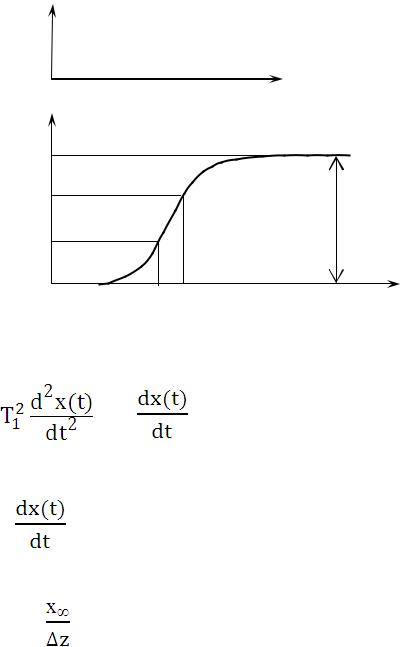
В зависимости от полученных данных x = f(t) проводят идентификацию объекта и записывают уравнение динамики. Объекты второго и более высокого порядка нередко аппроксимируют объектами первого порядка.
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
∆z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
t |
|
|
|
|||||||||||
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
0,7x∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
x∞ |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
0,33x∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
τ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
t1 |
|
|
t2 |
|
|
|
|
|
t |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Вместо уравнения |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
+T2 |
+ х(t) = kнz(t – τ1) |
(2.24) |
||||||||||
записывают уравнение |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
T |
+ х(t) = kнz(t – τ) . |
(2.25) |
|||||||||||||||||||||
Величины Т, kн и τ находят по формулам: |
|
|
|||||||||||||||||||||||
|
|
kн = |
; |
T = 1,25 (t2 – t1); τ = 0,5 (3t1 – t2) . |
|||||||||||||||||||||
3. Автоматические регуляторы
Автоматический регулятор (АР) – устройство, с
помощью которого в системах регулирования обеспечивается поддержание технологической величины около заданного значения.
32

Структурная схема АР имеет вид:
|
yзд |
|
|
|
|
|
|
|
|
|
от ИП y |
ε = y – yзд |
|
|
|
|
|
|
|
к ИУ |
|
|
|
|
|
u = f(ε) |
|
|
|
|||
|
ФБ |
|
|
УС |
||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
ЭС
Рис. 3.1. Структурная схема автоматического регулятора:
ЭС – элемент сравнения, ФБ – функциональный блок, УС – усилитель мощности.
Вэлементе сравнения ЭС текущее значение
регулируемой величины у сравнивается с заданным узд. Величина рассогласования ε = у – узд подается в функциональный блок, где формируется выходной сигнал регулятора u = f(ε,t). Зависимость, по которой происходит изменение выходного сигнала регулятора u, называют законом регулирования
Вусилителе УС происходит увеличение мощности (но не величины!) выходного сигнала регулятора, который затем подается на исполнительное устройство.
3.1. Классификация АР
Регуляторы классифицируют по нескольким признакам: наличие подводимой энергии, вид используемой энергии, вид регулируемой величины, характер регулирующего воздействия, характер действия, закон регулирования.
По наличию подводимой энергии АР подразделяют на не имеющие вспомогательного источника энергии (регуляторы прямого действия) и имеющие таковой (регуляторы непрямого действия). У регуляторов прямого действия для перемещения регулирующего органа в исполнительном устройстве используется энергия регулируемой среды. Они просты по конструкции, но имеют ограниченную мощность, а также не обеспечивают высокого качества регулирования.
33
Пример: регулятор Уатта – для регулирования давления пара в паровой машине.
У регуляторов непрямого действия перемещение регулирующего органа в ИУ осуществляется за счет дополнительного привода, работающего от внешнего источника энергии. Они более сложны по конструкции, но способны обеспечить высокое качество регулирования.
По |
виду |
используемой |
энергии |
различают |
|
гидравлические, |
пневматические и электрические АР. |
||||
В |
гидравлических регуляторах |
для перемещения |
|||
регулирующего |
органа используется |
энергия |
жидкости |
||
(обычно |
трансформаторного масла) |
под |
давлением |
||
0,6-0,8 МПа. Они применяются редко, обычно в тех случаях, когда нужны значительные усилия для перемещения регулирующего органа.
В электрических АР используется электрическая энергия промышленной частоты. Они обладают значительным быстродействием, позволяют передавать сигналы на большое расстояние, точны и обеспечивают высокое качество регулирования.
Пневматические АР используют энергию сжатого воздуха давлением 140кПа. Они надежны в работе, взрыво- и пожаробезопасны, достаточно точны. Их некоторая инерционность (в отдельных случаях время прохождения сигнала несколько десятков секунд) и относительно небольшая дальность действия (до 300м) в большинстве случаев вполне приемлемы для регулирования химикотехнологических процессов, обладающих, как правило, значительной инерцией.
По виду регулируемой величины различают регуляторы температуры, давления, уровня, расхода, концентрации и других величин.
По характеру действия АР подразделяют на регуляторы с прямой и обратной характеристикой. У первых
34
с увеличением ε выходной сигнал u растет, у вторых – уменьшается.
По характеру регулирующего воздействия различают регуляторы прерывистого и непрерывного действия. У регуляторов прерывистого действия непрерывному изменению входной величины соответствует прерывистое изменение выходной величины. Они делятся на позиционные и импульсные. В регуляторах непрерывного действия непрерывному изменению входной величины соответствует непрерывное изменение выходной величины.
По закону регулирования регуляторы непрерывного действия делят на интегральные, пропорциональные, пропорционально-интегральные, пропорциональнодифференциальные и пропорционально-интегрально- дифференциальные.
В настоящее время для автоматизации химических производств используются регуляторы непрерывного действия и в ряде случаев позиционные регуляторы. Рассмотрим регуляторы этих типов при условии, что они имеют прямую характеристику.
3.2. Позиционные регуляторы
Среди позиционных регуляторов наибольшее распространение получили двухпозиционные регуляторы. У них выходная величина может принимать только минимальное или максимальное значение; они реагируют только на знак отклонения регулируемой величины от заданного значения. По сравнению с другими типами АР они обладают наибольшим быстродействием, а также просты по конструкции и надежны в работе. Поэтому выбор регулятора для конкретного объекта всегда начинают с позиционного регулятора – сможет ли он обеспечить заданное качество регулирования.
35
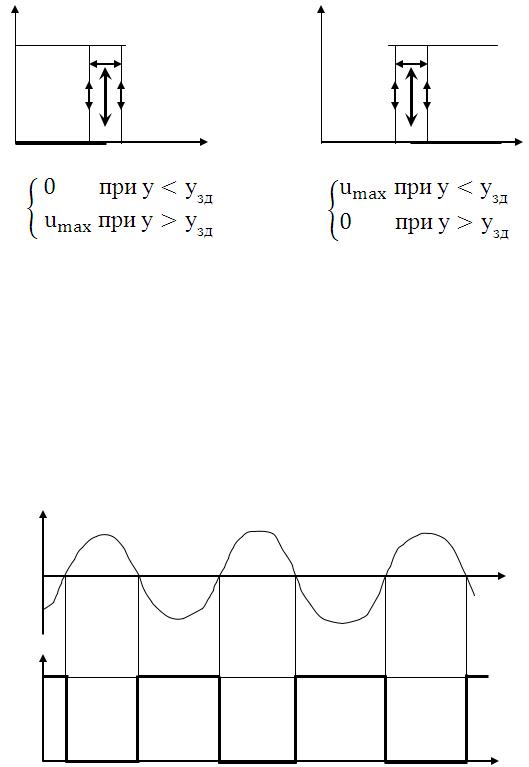
Статическая характеристика позиционного регулятора – зависимость выходной величины от входной – приведена на рис. 3.2.
u |
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
umax |
|
|
|
|
|
|
umax |
|
|
|
|
|
|
|
|
||||
|
|
∆у |
|
|
|
∆у |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
у |
|
|
|
0 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
у |
|
||||||||
|
|
узд |
|
|
|
|
|
|
узд |
|
|
||||||||
|
u = |
|
|
|
|
u = |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Рис. 3.2. Статическая характеристика позиционного регулятора:
а – настройка на максимум, б – настройка на минимум.
Позиционные регуляторы, как правило, имеют зону нечувствительности у, где они не различают значения у и
узд.
Динамическая характеристика позиционного регулятора при настройке на минимум имеет вид:
у
yзд
t
u
umax
0 |
t |
Рис. 3.3. Динамическая характеристика позиционного регулятора.
36
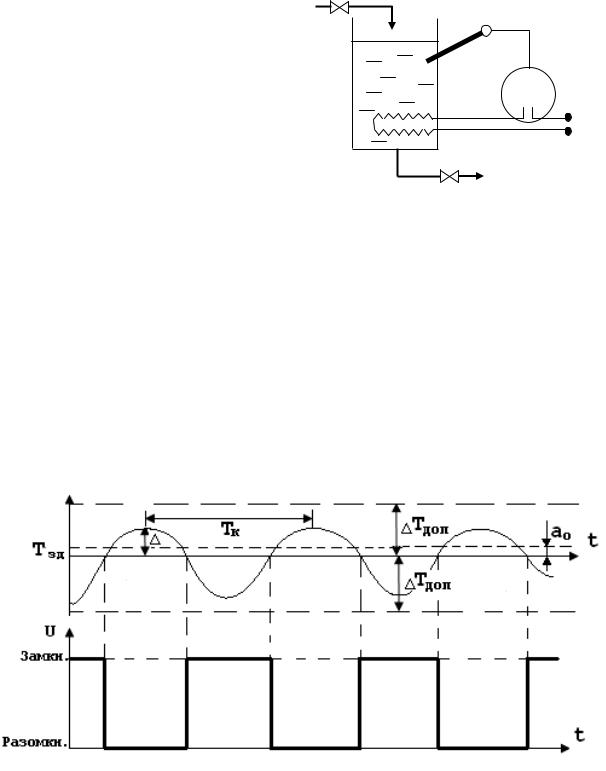
Вкачестве примера
рассмотрим |
работу |
|
|||
проточного |
нагревателя |
|
|||
жидкости. |
|
Цель |
ТС |
||
регулирования такого объекта |
|||||
|
|||||
– |
нагреть |
жидкость |
до |
220В |
|
определенной |
температуры, |
|
|||
что |
осуществляется за |
счет |
|
||
подачи тока на нагреватель, расположенный внутри емкости. Текущее значение температуры фиксируется
термопреобразователем сопротивления и подается на позиционный регулятор ТС. В зависимости от соотношения между заданным и текущим значением температуры жидкости регулятор замыкает или размыкает контактное реле, в результате чего на нагреватель подается или не подается напряжение. Так как энергия на спираль нагревателя подается порциями, то в системе возникают автоколебания, обусловленные инерционными свойствами самого объекта.
T
|
|
|
|
|
|
А |
|
|
|
t |
|
|
|
|
Tзд |
|
|
|
|
|
|
||||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
umax |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
0 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Качество переходного процесса |
в этом случае |
|||||||||
определяется периодом колебаний Тк (частотой  =
=  ),
),
амплитудой колебаний А и смещением средней линии колебаний а0 относительно заданного значения.
37
Применение позиционных регуляторов возможно, если амплитуда колебаний А не превышает допустимых отклонения регулируемой величины от заданного значения. (для данного примера ΔTдоп).
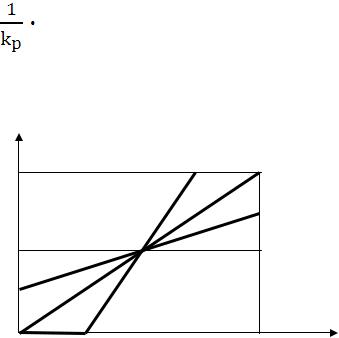
3.3.Пропорциональные регуляторы (П-регуляторы)
Вэтих регуляторах управляющее воздействие пропорционально отклонению регулируемой величины от заданного значения. Закон регулирования П-регулятора имеет вид:
u = kр ε + uо , |
(3.1) |
где kр – коэффициент усиления регулятора. Это параметр настройки регулятора, т.е. величина, которую можно независимо изменить, uо – выходной сигнал регулятора в начальный момент времени. Иногда пользуются понятием
предел пропорциональности:
δ = 100% . |
(3.2) |
Статическая характеристика П-регулятора имеет вид:
|
u |
kp=∞(δ = 0) kp=2(δ =50%) |
|||||||
|
|
|
|
||||||
u100% |
|
|
|
|
|
|
|
kp=1(δ = 100%) |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
kp=0,5(δ = 200%) |
|
|
|
|
|
|
|
|
||
|
u0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
узд |
|
|
y100% |
|
y |
|
В промышленных регуляторах kр |
обычно находится в |
||||||
диапазоне от 0,3 до 50. |
Динамическая характеристика |
||||||
П-регулятора имеет вид:
38

ε
1
|
0 |
|
t |
|
|
|
|
|
|
h(t) |
|
|
||
|
|
|||
|
|
|
|
|
|
|
|
kp2 > kp1 |
|
|
kp2 |
|
kp1 |
|
||
|
|
|
|
|
|
||
|
|
|
|
u0
t
П-регуляторы просты по конструкции, надежны в работе, но в системе регулирования не могут привести регулируемую величину точно к заданному значению.
3.4. Интегральные регуляторы (И-регуляторы)
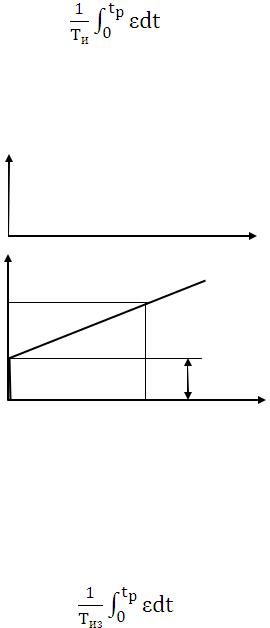
В этих регуляторах выходная величина пропорциональна интегралу от входной величины:
u = |
+ u0 , |
(3.3) |
где Ти – время интегрирования, параметр настройки регулятора. Это время, в течение которого выходная величина регулятора изменяется на столько же, на сколько изменилась его входная величина.
Динамическая характеристика И-регулятора имеет вид:
ε
1
|
|
0 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
t |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h(t) |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||
|
1 |
|
|
|
|
|
|
|
|
Ти2 > Ти1 |
|||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||
|
u0 |
|
|
|
|
|
|
|
|
|
|||
Ти1 |
|
Ти2 |
|
|
|
|
|
||||||
|
39 |
|
|
t |
|
||||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Интегральные регуляторы обеспечивают регулирование с высокой точностью (приводят регулируемую величину точно к заданному значению), но работают медленно, поэтому отклонение величины от заданного значения в процессе регулирования могут быть значительными. Это главный недостаток И-регуляторов.
3.5. Пропорционально-интегральные регуляторы (ПИ-регуляторы)
Эти регуляторы объединяют действие пропорциональных и интегральных регуляторов:
u = kр ε + |
+ u0 . |
(3.4) |
ПИ-регуляторы имеют два параметра настройки: коэффициент усиления kр и время интегрирования Ти.
Динамическая характеристика ПИ-регулятора:
|
|
|
ε |
|
|
|
|
|
|
|||
|
|
|
1 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
t |
||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
h(t) |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kp |
|
|
|
|
u0 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
Ти |
|
|
|
|
||||
|
|
|
|
t |
||||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Приведенное уравнение (3.4) описывает ПИ-регуляторы с независимыми параметрами настройки. Существуют также ПИ-регуляторы с зависимыми параметрами настройки, закон регулирования которых имеет следующий вид:
u = kр( ε + |
) + u0 , |
(3.4) |
|
40 |
|