

Розв'язок
Побудуємо кінематичну схему механізму в умовному масштабі (рис.5.2,а). На схемі покажемо задані сили
 ,
а також момент
,
а також момент
М3 , що діє на ланку 3. Урівноважуючий момент, який визначається, прикладемо (згідно умови) до ведучої ланки ОА, спрямувавши його у довільному напрямі. Силовий розрахунок механізму виконаємо без урахування сил і моментів сил інерції Даламбера.1
Обидва запропоновані в умові методи розв’язку завдання потребують певних дій з силами. Тому при розгляданні рівноваги механізму або його окремих частин моменти сил, що прикладені до ланок, треба заміняти відповідними парами сил.
Визначення реакцій в кінематичних парах механізму і урівноважуючого моменту методом планів сил.
При розв’язку задачі методом планів сил, механізм умовно роз’єд-нують на структурні групи Ассура і механізм I-го класу. У нашому випадку маємо формулу будови механізму: I (0,1) → II (2,3).
Силовий розрахунок починають з кінця механізму. Для нашого механізму це означає, що спочатку треба розглянути рівновагу структурної групи (2,3), а за цим – рівновагу ведучої ланки 1. Зробимо ці кроки послідовно.
Рівновага структурної групи (2,3).
Побудуємо
групу Ассура (2,3) в довільному масштабі
(рис.5.2,б). Прикладемо до неї сили
![]() і
і![]() .
Момент М3
заміняємо парою сил
.
Момент М3
заміняємо парою сил
![]() .
Ці сили прикладемо на кінцях ланки 3 (в
точках В і С), перпендикулярно до ланки
3 і у напрямі дії моменту М3.
Модулі сил пари дорівнюють:
.
Ці сили прикладемо на кінцях ланки 3 (в
точках В і С), перпендикулярно до ланки
3 і у напрямі дії моменту М3.
Модулі сил пари дорівнюють:
![]() Н
(5.1)
Н
(5.1)
В
кінцевих шарнірах А і С прикладемо сили
реакцій, що діють на ланки 2 і 3 з боку
інших ланок механізму. В шарнірі А силу
![]() (сила, що діє на ланку 2 з боку ланки 1)
розкладемо на складові: нормальну
(сила, що діє на ланку 2 з боку ланки 1)
розкладемо на складові: нормальну![]() і тангенціальну
і тангенціальну![]() .
В шарнірі С силу
.
В шарнірі С силу![]() (сила, що діє на ланку 3 з боку ланки 0)
також зобразимо у вигляді суми нормальної
(сила, що діє на ланку 3 з боку ланки 0)
також зобразимо у вигляді суми нормальної![]() і тангенціальної
і тангенціальної![]() складових. Напрямок складових невідомих
реакцій приймаємо довільно.
складових. Напрямок складових невідомих
реакцій приймаємо довільно.
Система сил, що діє на групу (2,3), є плоскою урівноваженою.
Для визначення невідомих сил застосуємо умови рівноваги плоскої системи сил у вигляді рівнянь:
![]() (5.2)
(5.2)
де
![]() - головний вектор системи сил в площині
дії сил;
- головний вектор системи сил в площині
дії сил;
![]() -
алгебраїчне значення головного моменту
системи сил в площині їх дії, відносно
будь-якого центру О.
-
алгебраїчне значення головного моменту
системи сил в площині їх дії, відносно
будь-якого центру О.
З першої умови в (5.2) маємо рівняння рівноваги сил, прикладених до групи (2,3):
![]() (5.3)
(5.3)
В
цьому рівнянні двома рисками позначені
вектори, в яких напрямок і величина є
відомими. Вектори, в яких відомий тільки
напрямок, позначені однією рискою. Отже
рівняння (5.3) має 4 невідомих параметри,
що свідчить про неможливість його
розв’язання шляхом графічних побудов.
Цієї проблеми можна уникнути, якщо
величини складових
![]() і
і![]() знайти аналітично, використовуючи
рівняння моментів в умові (5.2).
знайти аналітично, використовуючи
рівняння моментів в умові (5.2).
Для
визначення
![]() складаємо рівняння рівноваги моментів
сил, що діють на ланку 2, відносно
внутрішнього шарніру В:
складаємо рівняння рівноваги моментів
сил, що діють на ланку 2, відносно
внутрішнього шарніру В:
![]() (5.4)
(5.4)
Тоді
![]() Н.
Н.
Складову
![]() визначимо з рівняння рівноваги моментів
сил, що діють на ланку 3, відносно того
ж внутрішнього шарніру В:
визначимо з рівняння рівноваги моментів
сил, що діють на ланку 3, відносно того
ж внутрішнього шарніру В:
![]() (5.5)
(5.5)
З
цього маємо
![]() Н.
Н.
Тепер
складові
![]() і
і![]() можуть бути знайдені графічним шляхом
за допомогою побудови плану сил групи
(2,3) (рис.5.2,в). Для цього, у відповідності
до рівняння (5.3), побудуємо векторний
многокутник сил. Приймаємо масштабний
коефіцієнт побудов на плані -
можуть бути знайдені графічним шляхом
за допомогою побудови плану сил групи
(2,3) (рис.5.2,в). Для цього, у відповідності
до рівняння (5.3), побудуємо векторний
многокутник сил. Приймаємо масштабний
коефіцієнт побудов на плані -![]() Н/мм.
Н/мм.
Довжину відрізків, що зображують сили, визначимо за формулами:
 (5.6)
(5.6)
Побудову силового многокутника проводимо в такій послідовності.
З
довільної точки а
відкладаємо відрізок ав,
який зображує в масштабі
![]() реакцію
реакцію![]() .
Далі послідовно відкладаємо сили
.
Далі послідовно відкладаємо сили![]() (відрізоквс),
(відрізоквс),
![]() (відрізоксd)
і
(відрізоксd)
і
![]() (відрізокde).
Нормальні складові реакцій
(відрізокde).
Нормальні складові реакцій
![]() (відрізокfa)
і
(відрізокfa)
і
![]() (відрізокef
)
отримаємо
графічно, на перетині прямих, проведених
з точок а
і е
у напрямку векторів
(відрізокef
)
отримаємо
графічно, на перетині прямих, проведених
з точок а
і е
у напрямку векторів
![]() і
і![]() .
Величини цих сил знайдемо після
вимірювання відрізківfa
і ef
і подальшого помноження їх довжин на
масштаб
.
Величини цих сил знайдемо після
вимірювання відрізківfa
і ef
і подальшого помноження їх довжин на
масштаб
![]() .
.
 (5.7)
(5.7)
Повні реакції в кінематичних парах А і С знайдемо за формулами:
![]() Н;
(5.8)
Н;
(5.8)
![]() Н
(5.9)
Н
(5.9)
Для
визначення реакції
![]() запишемо
рівняння рівноваги сил, прикладених до
ланки 2 :
запишемо
рівняння рівноваги сил, прикладених до
ланки 2 :
![]() (5.10)
(5.10)
З
плану сил (рис.5.2,в)
видно, що відрізок сf
відповідає
реакції
![]() .
Величина цієї реакції дорівнює:
.
Величина цієї реакції дорівнює:
![]() Н
(5.11)
Н
(5.11)
Цю
ж силу можна було визначити інакше, а
саме, розглянувши рівновагу ланки 3.
Тоді з рівняння рівноваги і плану сил
для ланки 3 отримали би
![]() Н,
причому
Н,
причому![]() .
.
Зауваження 1.
Слід
зазначити, що нормальні складові реакцій
в шарнірах А і С можна знайти не лише
графічним способом. Прийнятними для
цього можуть бути також графоаналітичний
або аналітичний методи. Для прикладу,
розглянемо визначення
![]() і
і![]() за допомогою аналітичних рівнянь
рівноваги моментів.
за допомогою аналітичних рівнянь
рівноваги моментів.
Складову
![]() визначимо з рівняння моментів сил, що
діють на групу відносно точки С.
визначимо з рівняння моментів сил, що
діють на групу відносно точки С.
![]() (5.12)
(5.12)
![]()
![]()
Складову
![]() визначимо з рівняння моментів сил, що
діють на групу відносно точки А.
визначимо з рівняння моментів сил, що
діють на групу відносно точки А.
![]() (5.13)
(5.13)
![]()

Як бачимо, результати, отримані аналітично, збігаються з попередніми результатами, що визначені за методом планів сил.
Рівновага ведучої ланки ОА.
Побудуємо
кінематичну схему ведучої ланки ОА при
заданому положенні механізму (рис.5.2,г).
Покажемо сили, що діють на неї. В точці
А з боку ланки 2 діє сила
![]() ,
величина и напрямок якої є відомими.
(Іноді, замість сили
,
величина и напрямок якої є відомими.
(Іноді, замість сили![]() можна зображати її складові, величина
і напрямок котрих теж відомі.) Урівноважуючий
момент МУР
заміняємо
парою сил
можна зображати її складові, величина
і напрямок котрих теж відомі.) Урівноважуючий
момент МУР
заміняємо
парою сил
![]() ,
прикладеною до точок О і А, перпендикулярно
до ланки ОА і у напрямку МУР.
В шарнірі О зображуємо силу реакції
,
прикладеною до точок О і А, перпендикулярно
до ланки ОА і у напрямку МУР.
В шарнірі О зображуємо силу реакції
![]() ,
розклавши її на відповідні складові:
нормальну
,
розклавши її на відповідні складові:
нормальну![]() і тангенціальну
і тангенціальну![]() .
Прикладена до ланки ОА система сил є
плоскою урівноваженою.
.
Прикладена до ланки ОА система сил є
плоскою урівноваженою.
З урахуванням (5.2) складемо рівняння рівноваги сил, прикладених до ланки ОА.
![]() (5.14)
(5.14)
Невідомі
величини
![]() і
і![]() знайдемо с плану сил (рис.5.2,д), побудованому
в масштабі
знайдемо с плану сил (рис.5.2,д), побудованому
в масштабі![]() Н/мм.
Для цього визначаємо довжину відрізків,
що зображують відомі сили.
Н/мм.
Для цього визначаємо довжину відрізків,
що зображують відомі сили.
 (5.15)
(5.15)
Побудову
плану сил проводимо в такій послідовності.
З
довільної точки а
відкладаємо відрізок ав,
який зображає в масштабі силу
![]() .
Далі відкладаємо силу
.
Далі відкладаємо силу![]() (відрізоквс).
Невідомі за величиною сили
(відрізоквс).
Невідомі за величиною сили
![]() (відрізоксd)
і
(відрізоксd)
і
![]() (відрізокda)
знаходимо графічно, на перетині прямих,
проведених з точок а
і с
у напряму відповідних зусиль. Далі,
складові реакції в шарнірі О знаходимо
після вимірювання відрізків сd
і da
і помноження їх довжин на масштаб
(відрізокda)
знаходимо графічно, на перетині прямих,
проведених з точок а
і с
у напряму відповідних зусиль. Далі,
складові реакції в шарнірі О знаходимо
після вимірювання відрізків сd
і da
і помноження їх довжин на масштаб
![]() .
.
 (5.16)
(5.16)
Тоді
повна реакція
![]() :
:
![]() Н
(5.17)
Н
(5.17)
Реакції в кінематичних парах знайдені.
Урівноважуючий
момент МУР
можна визначити, якщо знайти хоча б одну
з сил, що складають пару
![]() (рис.5.2,г).
Для цього розглянемо рівняння рівноваги
моментів сил, прикладених до ланки ОА,
відносно точки А.
(рис.5.2,г).
Для цього розглянемо рівняння рівноваги
моментів сил, прикладених до ланки ОА,
відносно точки А.
![]() (5.18)
(5.18)
З цього рівняння маємо:
![]() Н
Н
Тоді
![]() Нм
Нм
Зауваження 2.
Урівноважуючий момент можна знайти значно простіше, якщо розглянути рівновагу моментів сил, прикладених до ланки ОА, відносно точки О.
![]()
![]() (5.19)
(5.19)
![]()
![]() Н∙м
Н∙м
Складову
![]() можна визначити аналітично з рівняння
моментів сил, що діють на ланку відносно
точки Е.
можна визначити аналітично з рівняння
моментів сил, що діють на ланку відносно
точки Е.
![]() (5.20)
(5.20)
Звідки
![]() Н
≈ 18 Н.
Н
≈ 18 Н.
Результати розрахунків збігаються з отриманими раніше.
Визначення урівноважуючого моменту методом М.Є.Жуковського.
Визначимо урівноважуючий момент за методом важеля Жуковського. Для цього будуємо в довільному масштабі повернутий на 90 план швидкостей (рис.5.2,е). На ньому, використовуючи теорему подібності, знаходимо положення точок а, в, с, d, S3, , що є точками прикладання сил на плані механізму.
Переносимо всі сили паралельно до самих себе від механізму до плану швидкостей, прикладаючи їх у відповідних точках.
Складаємо рівняння моментів сил відносно полюса плану швидкостей.
![]() .
(5.21)
.
(5.21)
![]()
З плану швидкостей видно, що
![]()
Тоді
![]()
![]()
Цей результат збігається із значенням РУР, визначеним методом моментів.
![]() Н·м.
(5.22)
Н·м.
(5.22)

Рис.5.2
РГР – 6 Визначення геометричних параметрів нульового
зубчастого колеса нормального зовнішнього
евольвентного зачеплення
Умова завдання. На рис.6.1 зображено нормальне зовнішнє зачеплення нульових зубчастих колес із зубцями евольвентного профілю, а на рис.6.2 - одне з колес цього зачеплення. В таблиці 6 приведені відомі геометричні параметри і геометричні параметри, що треба визначити.
При розв’язанні завдання прийняти наступні позначення :
m – модуль зуба;
z – число зубців колеса;
w – кут зачеплення;
і, якщо потрібно, застосувати наведені формули для визначення основних розмірів нульвого зубчастого колеса:
ha = m – висота головки зуба;
hf = 1,25m – висота ніжки зуба;
h = 2,25m – висота зуба;
![]() –
товщина зуба по ділильному колу;
–
товщина зуба по ділильному колу;
p = m – крок зачеплення по ділильному колу;
![]() –
радіус ділильного кола;
–
радіус ділильного кола;
![]() –радіус
початкового кола;
–радіус
початкового кола;
![]() –
радіус кола виступів зубців;
–
радіус кола виступів зубців;
![]() –
радіус кола западин зубців;
–
радіус кола западин зубців;
rв = rw cosw – радіус основного кола.
Визначити: геометричні параметри, що потрібно знайти (стовбці 4-13), через задані параметри (стовбці 1-3), відповідно до варіантів (стовбець 0) за таблицею 6.
Таблиця 6
|
№ |
Задано |
Визначити | ||||||||||||
|
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 | |
|
1 |
m |
rа |
w |
hа |
hf |
h |
p |
s |
r |
rw |
rf |
rв |
z | |
|
2 |
z |
h |
w |
r |
rw |
rf |
rа |
rв |
hf |
hа |
p |
s |
m | |
|
3 |
z |
hf |
w |
r |
rw |
rf |
rа |
hа |
h |
p |
s |
rв |
m | |
|
4 |
p |
z |
w |
r |
rw |
rа |
hа |
hf |
h |
s |
rf |
rв |
m | |
|
5 |
rf |
z |
w |
r |
rw |
rа |
hа |
hf |
h |
s |
p |
rв |
m | |
|
6 |
rв |
m |
w |
r |
rw |
rf |
rа |
hа |
h |
hf |
p |
s |
z | |
|
7 |
rа |
p |
w |
r |
rw |
rf |
hа |
hf |
h |
s |
rв |
m |
z | |
|
8 |
rв |
z |
w |
r |
rw |
rf |
hа |
hf |
h |
s |
p |
m |
rа | |
|
9 |
s |
rw |
w |
r |
rf |
rа |
hа |
hf |
h |
p |
rв |
m |
z | |
|
10 |
p |
rf |
w |
r |
rw |
rа |
hа |
hf |
h |
s |
rв |
m |
z | |
|
11 |
s |
rа |
w |
r |
rw |
rв |
rf |
hf |
hа |
h |
p |
m |
z | |
|
12 |
m |
rf |
w |
r |
rw |
rв |
rа |
hа |
h |
hf |
p |
s |
z | |
|
13 |
p |
rw |
w |
r |
rf |
rв |
rа |
hа |
h |
hf |
s |
m |
z | |
|
14 |
hf |
rf |
w |
r |
rw |
rв |
rа |
hа |
h |
s |
p |
m |
z | |
|
15 |
hа |
rа |
w |
r |
rw |
rв |
rf |
hf |
h |
s |
p |
m |
z | |
|
16 |
m |
rа |
w |
r |
rw |
rв |
rf |
hf |
h |
hа |
p |
s |
z | |
|
17 |
h |
z |
w |
hа |
m |
rв |
s |
p |
hf |
rа |
rf |
rw |
r | |
|
18 |
hf |
z |
w |
m |
rв |
s |
p |
hа |
h |
rа |
rf |
rw |
r | |
|
19 |
z |
p |
w |
m |
rв |
s |
hf |
hа |
h |
rа |
rf |
rw |
r | |
|
20 |
z |
rf |
w |
m |
rв |
s |
p |
hf |
h |
rа |
hа |
rw |
r | |
|
21 |
m |
rв |
w |
z |
p |
s |
hа |
hf |
h |
rа |
rf |
rw |
r | |
|
22 |
r |
rа |
w |
m |
z |
s |
hа |
hf |
h |
p |
rf |
rw |
rв | |
|
23 |
z |
rв |
w |
m |
rа |
s |
p |
hf |
h |
hа |
rf |
rw |
r | |
|
24 |
rw |
s |
w |
m |
z |
rв |
p |
hf |
h |
hа |
rf |
rа |
r | |
|
25 |
r |
p |
w |
m |
z |
s |
rв |
hf |
h |
hа |
rf |
rw |
rа | |
|
26 |
rа |
s |
w |
m |
z |
p |
rв |
hf |
h |
hа |
rf |
rw |
r | |
|
27 |
rf |
m |
w |
p |
z |
s |
rв |
hf |
h |
hа |
rа |
rw |
r | |
|
28 |
rw |
p |
w |
m |
z |
s |
rв |
hf |
h |
hа |
rf |
rа |
r | |
|
29 |
rf |
hf |
w |
m |
z |
s |
p |
rв |
h |
hа |
rа |
rw |
r | |
|
30 |
rа |
hа |
w |
m |
z |
s |
p |
rв |
h |
hf |
rf |
rw |
r | |
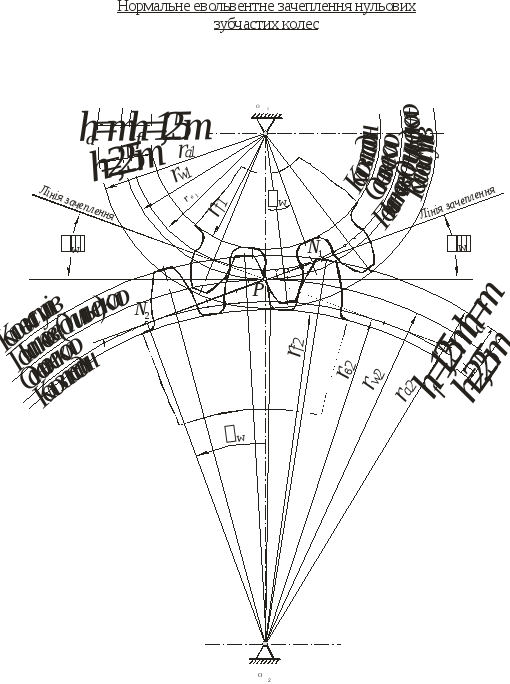
Рис. 6.1

Рис. 6.2