Приклад розв’язання ргр - 2
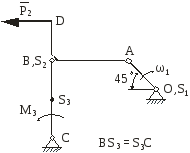
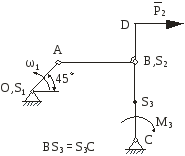
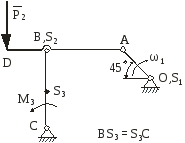
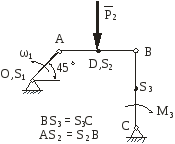
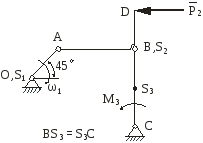
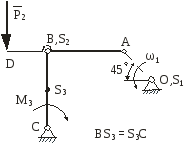
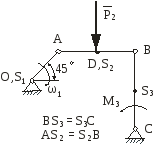
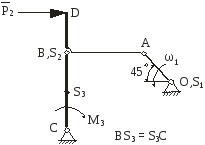
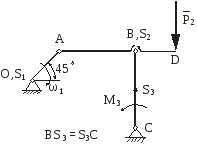
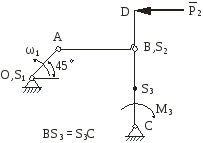
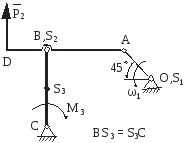
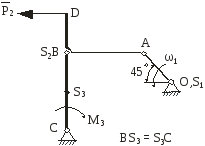
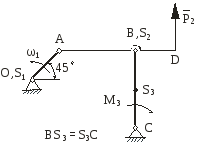
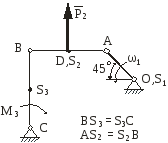
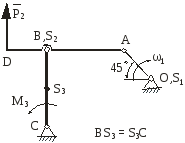
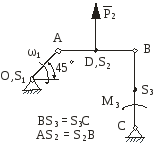
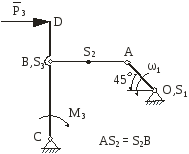
На рис.2.1 зображена кінематична схема плоского важільного механізму у заданому положенні.
|
Рис. 2.1 |
Дано:
ОА – ведуча ланка, 1 – кутова швидкість ланки ОА; 1 – кутове прискорення ланки ОА;
задані розміри.
Потрібно:
1) Побудувати запропоновану кінематичну схему механізму в заданому положенні.
2) Побудувати план швидкостей. Визначити швидкості точок А, В, D механізму і кутові швидко-сті ланок 2 і 3.
3) Побудувати план прискорень. Визначити прискорення точок А, В і D механізму і кутові приско-рення ланок 2 і 3. |
Розв'язок
Побудова кінематичної схеми механізму.
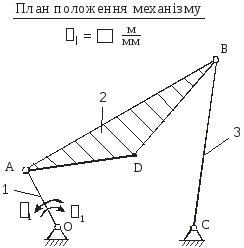
Для проведення кінематичного аналізу механізму побудуємо окремо його кінематичну схему в заданому положенні, користуючись умовним масштабом l (рис.2.2,а).
Побудова плану швидкостей. Визначення швидкостей точок А, В, D механізму і кутових швидкостей ланок 2 і 3.
Побудову плану швидкостей виконуємо у послідовності:
- побудова векторів швидкостей особливих точок (за особливі точки приймаємо точки рухомого поєднання ланок, тобто пов’язані з кінематичними парами);
- побудова векторів швидкостей інших точок, що належать механізму і потребують визначення.
а) Визначимо швидкість точки А , як точки, яка належить кривошипу ОА, що обертається навколо нерухомого центра О з кутовою швидкістю 1:
![]() ,
(м/с) (2.1)
,
(м/с) (2.1)
Вектор
![]() перпендикулярний до кривошипа ОА і
спрямований в бік його обертання.
Швидкість
перпендикулярний до кривошипа ОА і
спрямований в бік його обертання.
Швидкість![]() зображаємо на плані швидкостей в масштабі
v
відрізком ра,
приймаючи
ра
= 5060
мм. Тоді масштабний коефіцієнт швидкостей
обчислимо за допомогою (2.2):
зображаємо на плані швидкостей в масштабі
v
відрізком ра,
приймаючи
ра
= 5060
мм. Тоді масштабний коефіцієнт швидкостей
обчислимо за допомогою (2.2):
![]() ,
,
![]() (2.2)
(2.2)
Із
довільної точки р,
прийнятої за полюс плану швидкостей,
відкладаємо перпендикулярно до ланки
ОА вектор
![]() (рис.2.2,б). Цей вектор є вектором швидкості
(рис.2.2,б). Цей вектор є вектором швидкості![]() .
.
б) Визначимо швидкість точки В, яка належить кінематичній парі, що з’єднує ланки 2 і 3. Запишемо 2 векторних рівняння:
 ,
(2.3)
,
(2.3)
де
![]()
Розв’язуємо
систему рівнянь (2.3) графічно. Для цього
через точку а
проведемо
пряму, перпендикулярну до АВ, а через
точку с,
яка збігається з полюсом р,
проведемо пряму, перпендикулярну до
ВС. На перетині цих перпендикулярів
відмічаємо точку в.
Вектор
![]() зображає абсолютну швидкість точки В.
Напрям швидкості
зображає абсолютну швидкість точки В.
Напрям швидкості
![]() визначається напрямком вектора
визначається напрямком вектора
![]() .
Вектор
.
Вектор![]() зображає швидкість
зображає швидкість![]() точки В у відносному обертанні навколо
точки А.
точки В у відносному обертанні навколо
точки А.
в) Швидкість точки D знайдемо з векторних рівнянь:
 .
(2.4)
.
(2.4)
Розв’язуємо
цю систему рівнянь графічно. Через точку
а
проведемо пряму, перпендикулярну до
DА, а через точку в
– пряму, перпендикулярну до DB. На перетині
цих перпендикулярів відмічаємо точку
d.
Вектор
![]() відображає абсолютну швидкість
відображає абсолютну швидкість![]() .
.
План швидкостей побудовано.
г) Використовуючи план швидкостей, знаходимо величини швидкостей точок і кутових швидкостей ланок.
Лінійні швидкості точок, (м/с):
![]() (2.5)
(2.5)
Кутові швидкості ланок 2 і 3 , (рад/с):
![]() (2.6)
(2.6)
Визначимо
напрями кутових швидкостей 2
і
3.
Для цього умовно переносимо вектор
![]() в точку В і розглянемо рух точки В
відносно точки А. Знаходимо, що2
спрямована
за годинниковою стрілкою. Аналогічно,
переносимо вектор
в точку В і розглянемо рух точки В
відносно точки А. Знаходимо, що2
спрямована
за годинниковою стрілкою. Аналогічно,
переносимо вектор![]() в точку В і розглянемо рух точки В
відносно точки С. Бачимо, що3
також
спрямована за годинниковою стрілкою.
Наносимо ці напрями кутових швидкостей
на план механізму (рис.2.2,а).
в точку В і розглянемо рух точки В
відносно точки С. Бачимо, що3
також
спрямована за годинниковою стрілкою.
Наносимо ці напрями кутових швидкостей
на план механізму (рис.2.2,а).
Побудова плану прискорень. Визначення прискорень точок А, В, D механізму і кутових прискорень ланок 2 і 3.
Побудову плану прискорень виконуємо у послідовності:
- побудова векторів прискорень особливих точок (точки рухомого поєд-нання ланок);
- побудова векторів прискорень інших точок, що належать механізму і потребують визначення.
а) Визначимо прискорення точки А , як точки, яка належить кривошипу ОА, що обертається з миттєвою кутовою швидкістю 1 і кутовим прискоренням 1.
Повне прискорення точки А дорівнює геометричній сумі нормального та тангенціального прискорень:
![]() (2.7)
(2.7)
Модулі цих прискорень знайдемо за формулами:
![]() (м/с2)
(2.8)
(м/с2)
(2.8)
![]() (м/с2)
(2.9)
(м/с2)
(2.9)
Зображаємо
прискорення
![]() відрізкомn1.
Приймаємо
n1=7080мм.
Тоді масштабний коефіцієнт прискорень:
відрізкомn1.
Приймаємо
n1=7080мм.
Тоді масштабний коефіцієнт прискорень:
![]() ,
,
![]() (2.10)
(2.10)
З
довільної точки ,
прийнятої за полюс плану прискорень,
відкладаємо вектор
![]() ,
спрямований паралельно ланці ОА від
точки А до точки О. Через точкуn1
проводимо вектор
,
спрямований паралельно ланці ОА від
точки А до точки О. Через точкуn1
проводимо вектор
![]() ,
який в масштабі
,
який в масштабі![]() зображає прискорення
зображає прискорення![]() .
Довжину відрізкаn1а
знаходимо за формулою:
.
Довжину відрізкаn1а
знаходимо за формулою:
![]() ,
(мм) (2.11)
,
(мм) (2.11)
Цей
вектор, перпендикулярний до ОА, і
спрямований за напрямком кутового
прискорення 1.
З’єднавши прямою точки
і а,
отримаємо вектор
![]() .
Цей вектор є вектором повного прискорення
точки А.
.
Цей вектор є вектором повного прискорення
точки А.
б) Визначимо прискорення точки В, як точки, яка належить водночас ланкам 2 і 3, що виконують плоско-паралельний рух.
Запишемо два векторних рівняння:
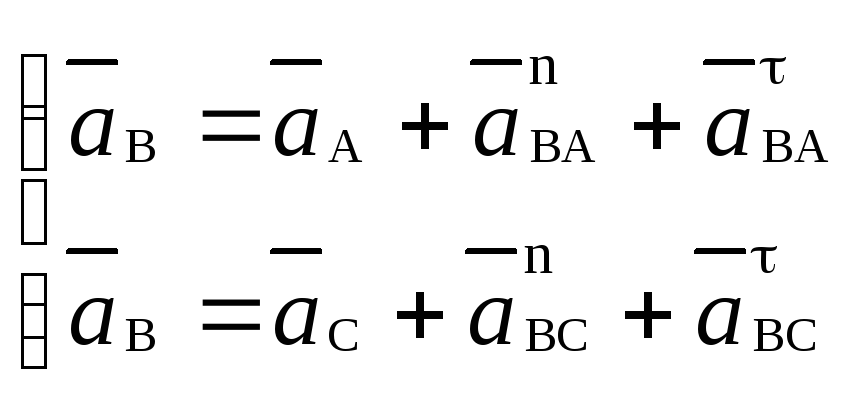 (2.12)
(2.12)
Прискорення аС=0, тому що точка С нерухома.
Величини нормальних прискорень обчислюються за формулами:
![]() (м/с2);
(м/с2);
![]() (м/с2)
(2.13)
(м/с2)
(2.13)
В прийнятому масштабі ці прискорення зобразимо відрізками аn2 і n3.
Величини цих відрізків дорівнюють:
![]() ,
(мм);
,
(мм);
![]() ,
(мм) (2.14)
,
(мм) (2.14)
Розв’язуємо
систему (2.12) графічно. З точки а
відкладаємо
відрізок
аn2,
який зображає вектор
![]() .
Відрізокаn2
проводимо
паралельно до ланки АВ в напрямі від
точки В до точки А. Через точку n2
проводимо перпендикулярно до АВ пряму,
по якій буде спрямований вектор
.
Відрізокаn2
проводимо
паралельно до ланки АВ в напрямі від
точки В до точки А. Через точку n2
проводимо перпендикулярно до АВ пряму,
по якій буде спрямований вектор
![]() .
Відповідно другому рівнянню системи
(2.12) з полюса
паралельно ВС в напрямі від В до С
відкладаємо відрізок n3.
Через точку n3
перпендикулярно
до ВС проводимо пряму, по якій буде
спрямований вектор
.
Відповідно другому рівнянню системи
(2.12) з полюса
паралельно ВС в напрямі від В до С
відкладаємо відрізок n3.
Через точку n3
перпендикулярно
до ВС проводимо пряму, по якій буде
спрямований вектор
![]() до перетину в точців
з прямою, по якій спрямований вектор
до перетину в точців
з прямою, по якій спрямований вектор
![]() .
Відрізокв
зображає вектор
.
Відрізокв
зображає вектор
![]() прискорення точки В. Відрізкиn2в
і
n3в
– тангенціальні прискорення
прискорення точки В. Відрізкиn2в
і
n3в
– тангенціальні прискорення
![]() ,
,![]() .
З’єднавши прямою точкиа
і в,
отримаємо відрізок ав,
що зображає вектор
.
З’єднавши прямою точкиа
і в,
отримаємо відрізок ав,
що зображає вектор
![]() .
.
в)
Прискорення
точки D
знаходиться побудовою
![]() ,
подібного
,
подібного![]() і з подібним розташуванням вершин, тому
що теорема подібності, сформульована
для плану швидкостей, справедлива і для
плану прискорень.
і з подібним розташуванням вершин, тому
що теорема подібності, сформульована
для плану швидкостей, справедлива і для
плану прискорень.
З плану прискорень визначаємо величини прискорень, (м/с2):
-



(2.15)
г) Величини кутових прискорень 2 і 3 знаходимо з формул:
![]() ,
(рад/с2)
;
,
(рад/с2)
;
![]() ,
(рад/с2)
(2.16)
,
(рад/с2)
(2.16)
Визначаємо
напрями кутових прискорень 2
і 3.
Умовно перенесемо вектор
![]() в точку В і розглянемо рух точки В навколо
точки А. Виходячи з цього, знаходимо, що
прискорення2
спрямовано
проти ходу годинникової стрілки.
Перенесемо вектор
в точку В і розглянемо рух точки В навколо
точки А. Виходячи з цього, знаходимо, що
прискорення2
спрямовано
проти ходу годинникової стрілки.
Перенесемо вектор
![]() в точку В і розглянемо її рух навколо
точки С. Бачимо, що3
спрямовано також проти ходу годинникової
стрілки. Наносимо ці кутові прискорення
на план механізму (рис.2.2,а).
в точку В і розглянемо її рух навколо
точки С. Бачимо, що3
спрямовано також проти ходу годинникової
стрілки. Наносимо ці кутові прискорення
на план механізму (рис.2.2,а).
Графічна частина
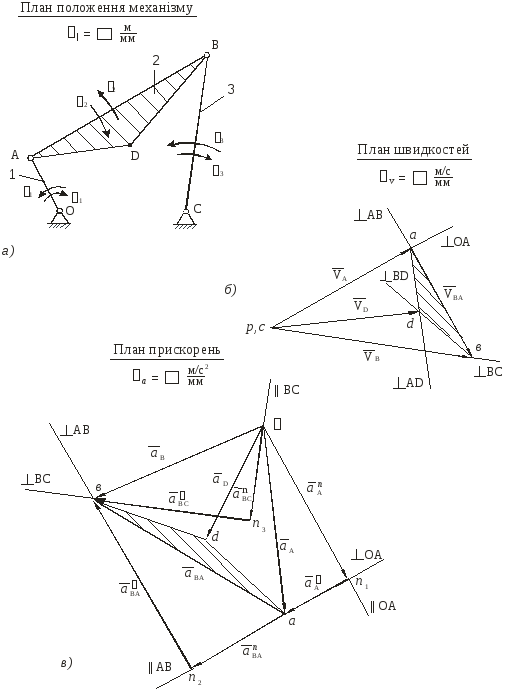
Рис.2.2
РГР - 3 Зведення сил (моментів сил) і мас (моментів інерції) в плоских важільних механізмах
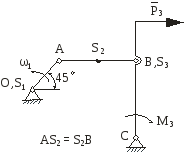
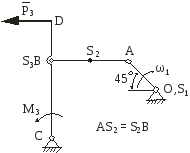
Умова
завдання.
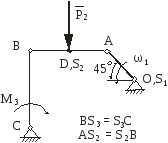
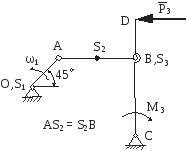
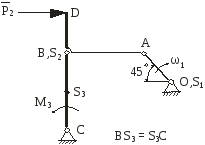
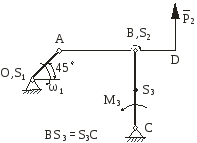
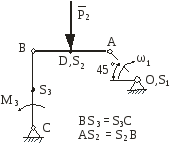
Дана кінематична схема механізму в
певному положенні (таблиця 3). На механізм
діють сила Рi
і момент сил М3,
прикладені відповідно до i-ої
і 3-ої
ланки. Маси ланок і моменти інерції
відносно центрів мас відомі. Відомі
також геометричні розміри ланок і
положення їх центрів мас. Задані
чисельні параметри: сила Рi=1000
Н; момент сили М3=100
Н·м; інерційні характеристики - m2=2 кг;
m3=10
кг;
![]() ;
;![]() ;
;![]() ;
геометричні розміри -
;
геометричні розміри -![]()
![]()
![]()
Визначити.
1) Зведену до точки А силу Р ЗВ, прикладену перпендикулярно до ланки ОА, методом Жуковського.
2) Зведений до ланки ОА момент сил М ЗВ.
3) Зведений до ланки ОА момент інерції механізму І ЗВ.
4) Зведену до точки А масу механізму m ЗВ.
Таблиця 3
|
1 |
|
2 |
|
|
3 |
|
4 |
|
Таблиця 3 (продовження)
|
5
|
|
6
|
|
|
7
|
|
8
|
|
|
9
|
|
10
|
|
|
11
|
|
12
|
|


Таблиця 3 (продовження)
|
13
|
|
14
|
|
|
15
|
|
16
|
|
|
17
|
|
18
|
|

Таблиця 3 (продовження)
|
19
|
|
20
|
|
|
21
|
|
22
|
|
|
23
|
|
24
|
|



Таблиця 3 (продовження)
|
25 |
|
26 |
|
|
27 |
|
28 |
|
|
29 |
|
30 |
|