Приклад розв’язання ргр – 1
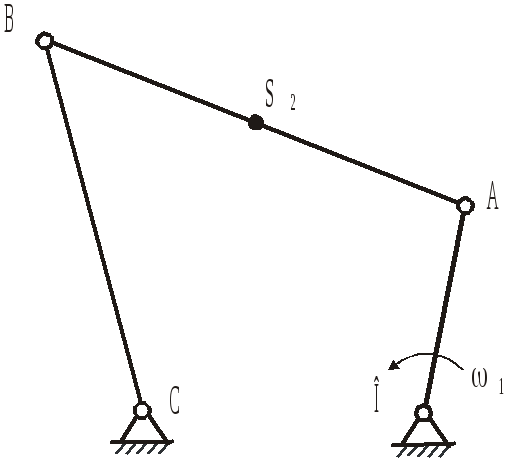
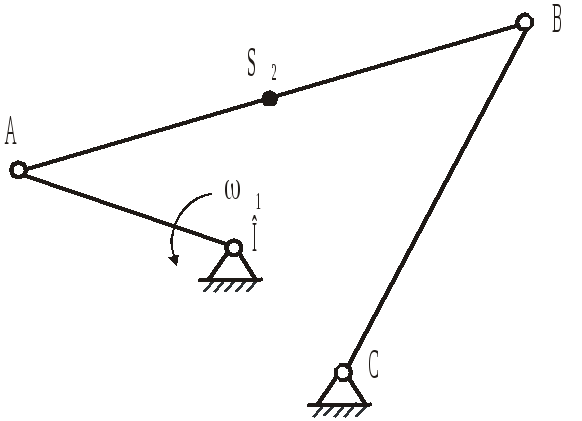
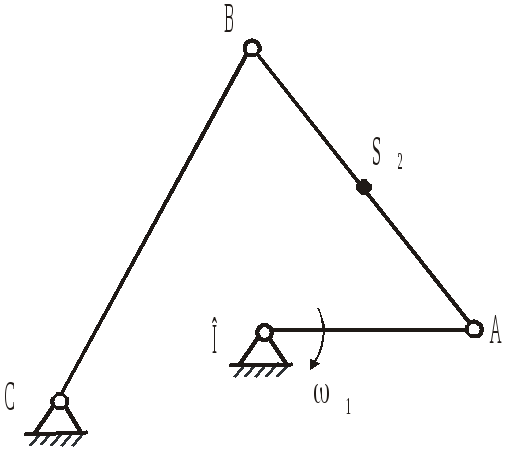
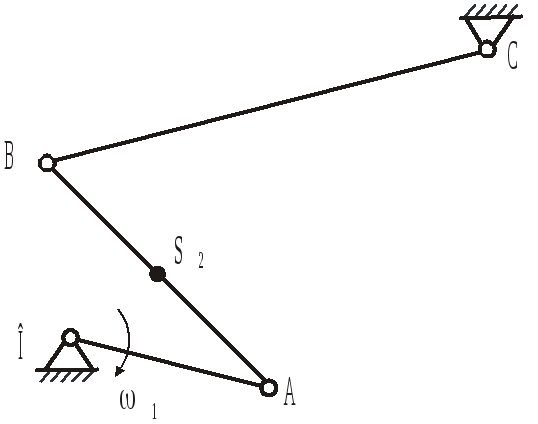
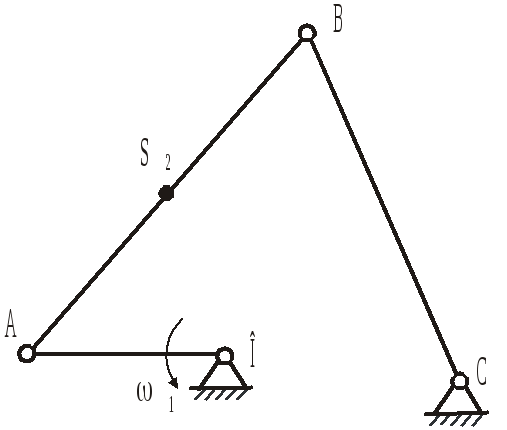
Умова завдання. Задано принципову схему плоского шестиланкового важільного механізму (рис.1.1).
Потрібно:
1) Виконати структурний аналіз механізму, якщо ведучою ланкою є кривошип 1.
2 )
Виконати структурний аналіз механізму,
якщо ведучою ланкою є інша ланка, рухомо
поєднана зі стійкою 6 (розглянути усі
можливі варіанти).
)
Виконати структурний аналіз механізму,
якщо ведучою ланкою є інша ланка, рухомо
поєднана зі стійкою 6 (розглянути усі
можливі варіанти).
Рис.1.1
Розв'язок
1. Виконаємо структурний аналіз механізму за умовою, що ведучою ланкою є ланка 1 (рис.1.2,а).
а) Визначимо ступінь рухомості механізму за структурною формулою Чебишева.:
W = 3n – 2p5 – p4, (1.1)
де W – ступінь рухомості механізму;
n – кількість рухомих ланок;
p5 – кількість кінематичних пар п’ятого класу;
p4 – кількість кінематичних пар четвертого класу.
У нашому випадку n = 5 (1, 2, 3, 4, 5), p5 = 7 (А, Б, С, Д, Е, F, O),
p4 = 0.
Тобто W = 3 5 – 2 7 = 1 (1.2)
Отже, при одній ведучій ланці механізм має визначеність руху.
б) Відокремимо групи Ассура, що входять до складу механізму.
Якщо ведучою ланкою механізму є кривошип 1, то від механізму послідовно від’єднуються (рис.1.2,б) дві структурні групи другого класу: група першої модифікації (ланки 4 та 5) і група третьої модифікації (ланки 2 та 3).
в) Таким чином формула будови механізму має вигляд:
І (6, 1) ІІ (2, 3) ІІ (4, 5) (1.3)
г) Найбільш високий клас структурної групи, що входить до складу механізму – другий. Тому механізм, що розглядається, має теж другий клас.
2. Виконаємо структурний аналіз механізму за умовою, що ведучою ланкою є ланка 3 (рис.1.2,а).
а) Ступінь рухомості механізму при зміні ведучої ланки не змінюється. Тому, користуючись (1.2), отримаємо:
W = 1
б) Відокремимо групи Ассура, що входять до складу механізму.
Якщо ведучою ланкою механізму є кулісний камінь 3 (рис.1.2,в), то від механізму від’єднуються дві структурні групи другого класу: група першої модифікації (ланки 4 та 5) і група другої модифікації (ланки 1 та 2).
в) Отримаємо формулу будови механізму:
І (6, 3) ІІ (1, 2) ІІ (4, 5)
г) Найбільш високий клас структурної групи, що входить до складу механізму – другий. Тому, і цей механізм має другий клас.
3. Виконаємо структурний аналіз механізму за умовою, що ведучою ланкою є ланка 5 (рис.1.2,а).
а) Ступінь рухомості механізму: W = 1
б) Якщо ведучою ланкою механізму є ланка 5 (рис.1.2,г), то від механізму можна від’єднати лише одну структурну групу третього класу, третього порядку (так звана триповодкова група) – ІІІ (1, 2, 3, 4).
в) Тоді формула будови механізму матиме вид:
І (6, 5) ІІІ (1, 2, 3, 4)
г) Найбільш високий клас структурної групи – третій. Тому, цей механізм має третій клас.
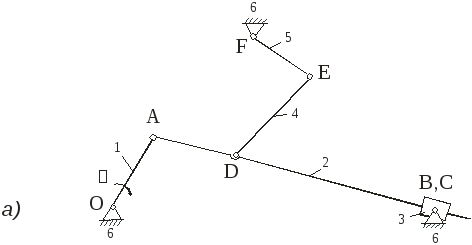

Рис.1.2, а, б

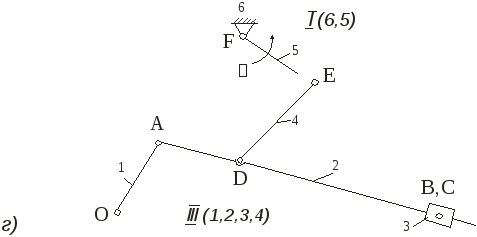
Рис. 1.2, в, г
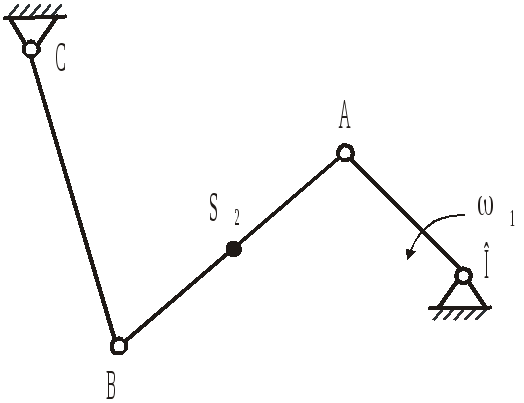
РГР - 2 Кінематичний аналіз плоского важільного механізму
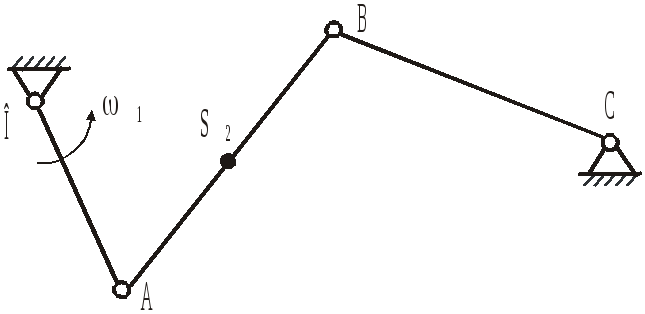
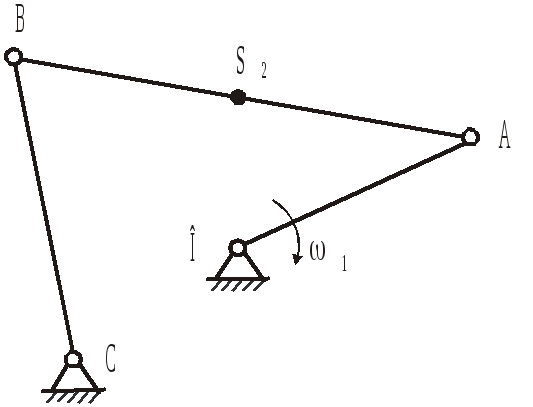
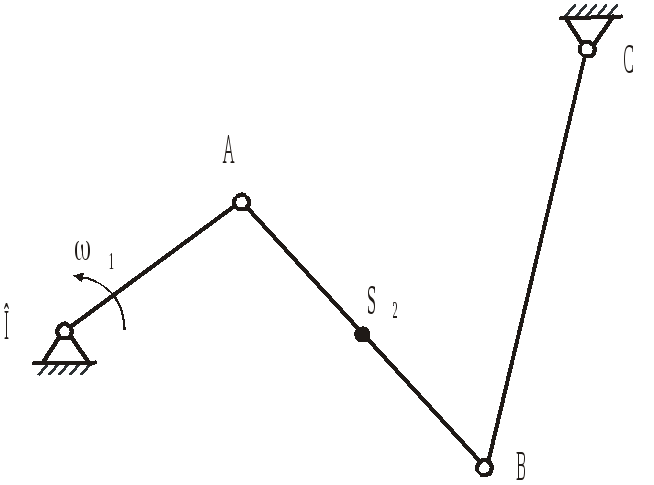
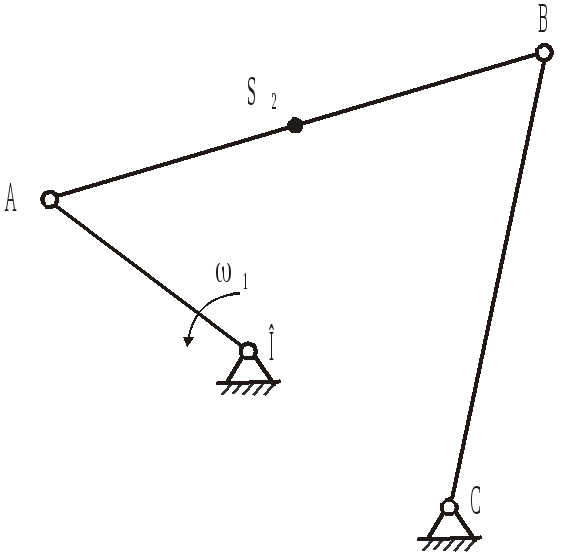
Умова завдання. Задана кінематична схема плоского важільного механізму (таблиця 2).
Потрібно:
1) Побудувати кінематичну схему механізму в заданому положенні.
2) Побудувати план швидкостей. Визначити швидкості точок А, В, S2 механізму і кутові швидкості ланок 2 і 3.
3) Побудувати план прискорень. Визначити прискорення точок А, В і S2 механізму і кутові прискорення ланок 2 і 3.
Додаткові
умови:
ведуча ланка - ланка ОА; кутова швидкість
ведучої ланки 1=const;
розміри ланок дорівнюють
![]() ;
точка S2
знаходиться
посередині ланки 2.
;
точка S2
знаходиться
посередині ланки 2.
Таблиця 2
|
1 |
|
2 |
|
|
3 |
|
4 |
|
|
5 |
|
6 |
|



Таблиця 2 (продовження)
|
7 |
|
8 |
|
|
9 |
|
10 |
|
|
11 |
|
12 |
|
|
13 |
|
14 |
|



Таблиця 2 (продовження)
|
15 |
|
16 |
|
|
17 |
|
18 |
|
|
19 |
|
20 |
|
|
21 |
|
22 |
|




Таблиця 2 (продовження)
|
23 |
|
24 |
|
|
25 |
|
26 |
|
|
27 |
|
28 |
|
|
29 |
|
30 |
|