

2.1. Построение схем замещения
Вспомните известные Вам из курсов «Электрические системы и сети», «Электрические машины», «Электромагнитные переходные процессы» схемы замещения воздушных и кабельных линий, трансформаторов, синхронных и асинхронных машин!
Схема замещения сложной цепи составляется из схем замещения отдельных ее элементов.
Схема замещения может быть справедлива
для любого момента времени или только
одного определенного момента (например,
замещение генератора сопротивлением
![]() ).
).
2.1.1. Воздушные и кабельные линии.Чаще всего воздушные и кабельные линии замещаются П-образными схемами замещения (рис. 2.1).

Рис. 2.1. П-образная схема замещения линии
Активная проводимость обычно не учитывается:
|
|
|
|
|
|
При длинах воздушных линий более 300 км вводятся поправочные коэффициенты, учитывающие распределенность параметров линий. (В случае длин более 1000 км они становятся комплексными).
При упрощенном рассмотрении
электромеханических переходных процессов
воздушные линии могут заменяться полными
![]() или
чисто реактивными
или
чисто реактивными![]() сопротивлениями. (Это справедливо при
небольшой длине линий или наличии
шунтирующих реакторов, уничтожающих в
схеме замещения составляющую емкостной
проводимости).
сопротивлениями. (Это справедливо при
небольшой длине линий или наличии
шунтирующих реакторов, уничтожающих в
схеме замещения составляющую емкостной
проводимости).
Поскольку для воздушных линий, имеющих провода большого сечения реактивное сопротивление значительно больше активного, то активное сопротивление в этом случае часто можно не учитывать.
При анализе переходных процессов в системах малой мощности или включающих кабельные линии, следует учитывать активные сопротивления линий.
2.1.2. Асинхронные двигатели. Асинхронные двигатели при исследовании электромеханических переходных процессов обычно представляются схемой замещения, отображающей основные контуры машины с учетом потерь (рис. 2.2).
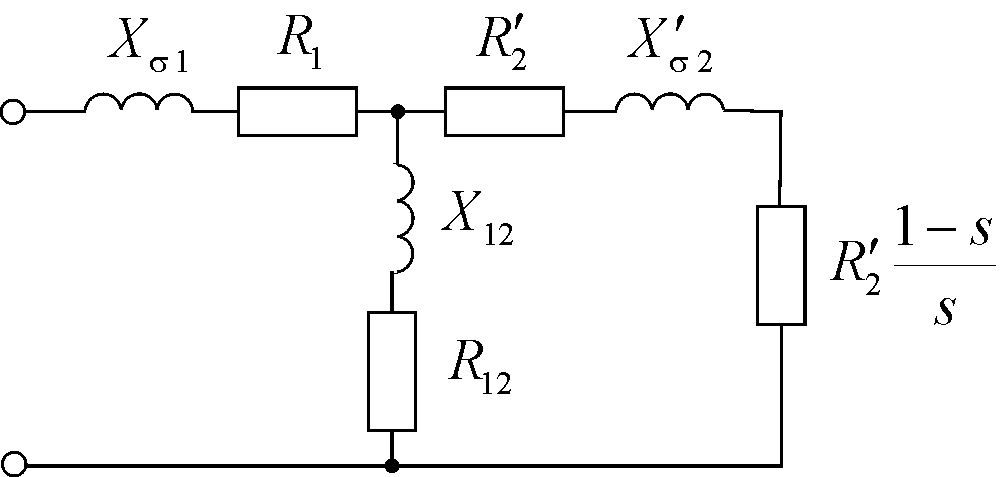
Рис. 2.2. Схема замещения асинхронного двигателя
На этой схеме замещения:
![]() - индуктивное сопротивление рассеяния
обмотки статора;
- индуктивное сопротивление рассеяния
обмотки статора;
![]() - активное сопротивление статорной
обмотки;
- активное сопротивление статорной
обмотки;
![]() - активное сопротивление обмотки ротора,
приведенное к статорной обмотке;
- активное сопротивление обмотки ротора,
приведенное к статорной обмотке;
![]() - индуктивное сопротивление рассеяния
роторной обмотки, приведенное к обмотке
статора;
- индуктивное сопротивление рассеяния
роторной обмотки, приведенное к обмотке
статора;
![]() - сопротивление взаимоиндукции между
обмотками статора и ротора;
- сопротивление взаимоиндукции между
обмотками статора и ротора;
![]() - активное сопротивление ветви холостого
хода, которым эквивалентируются потери
активной мощности в сердечнике от
основного магнитного потока;
- активное сопротивление ветви холостого
хода, которым эквивалентируются потери
активной мощности в сердечнике от
основного магнитного потока;
![]() - скольжение.
- скольжение.
В практических расчетах часто используют упрощенные схемы замещения асинхронного двигателя, например Г-образную (рис. 2.3а).
|
|
|
|
а) |
б) |


Рис. 2.3. Упрощенные схемы замещения асинхронных двигателей
а - Г-образная, б – не учитывающая ветвь намагничивания
Иногда можно использовать более грубое
приближение, не учитывая активные
сопротивления
![]() и
и![]() , что приводит к завышению вращающегося
момента двигателя на 10-15 %. В некоторых
случаях применяют еще более грубую
модель, исключая из схемы замещения
сопротивление
, что приводит к завышению вращающегося
момента двигателя на 10-15 %. В некоторых
случаях применяют еще более грубую
модель, исключая из схемы замещения
сопротивление![]() (рис. 2.3б).
(рис. 2.3б).
2.1.3. Трансформаторы.При анализе электромеханических переходных процессов чаще всего используют Г-образную схему замещения трансформатора, не учитывающую активные сопротивления (рис. 2.4).

Рис. 2.4. Упрощенная Г-образная схема замещения трансформатора
На этой схеме:
![]() - индуктивное сопротивление рассеяния
первичной обмотки трансформатора;
- индуктивное сопротивление рассеяния
первичной обмотки трансформатора;
![]() -
индуктивное сопротивление рассеяния
вторичной обмотки, приведенное к
первичной обмотке трансформатора;
-
индуктивное сопротивление рассеяния
вторичной обмотки, приведенное к
первичной обмотке трансформатора;
![]() - индуктивное сопротивление ветви
намагничивания.
- индуктивное сопротивление ветви
намагничивания.
В ряде случаев ветвь намагничивания не учитывают.
2.1.4. Синхронные генераторы и двигатели.На рис. 2.5 приведены схемы замещения явнополюсной синхронной машины с учетом демпферной обмотки по продольной (а) и поперечной (б) осям.
|
|
|
|
а) |
б) |


Рис. 2.5. Схемы замещения явнополюсной синхронной машины с учетом демпферной обмотки
а – по продольной оси; б – по поперечной оси
На этом рисунке:
![]() ,
,![]() -
сопротивления взаимоиндукции между
контурами статора и ротора по продольной
и поперечной осям;
-
сопротивления взаимоиндукции между
контурами статора и ротора по продольной
и поперечной осям;
![]() и
и![]() -
сопротивления рассеяния успокоительной
обмотки по продольной и поперечной
осям;
-
сопротивления рассеяния успокоительной
обмотки по продольной и поперечной
осям;
![]() -
сопротивление рассеяния обмотки
возбуждения;
-
сопротивление рассеяния обмотки
возбуждения;
![]() -
индуктивное сопротивление рассеяния
обмотки статора;
-
индуктивное сопротивление рассеяния
обмотки статора;
![]() -
активное сопротивление обмотки статора;
-
активное сопротивление обмотки статора;
![]() ,
,![]() и
и![]() -
активные сопротивления обмотки
возбуждения и успокоительной обмотки.
-
активные сопротивления обмотки
возбуждения и успокоительной обмотки.
Активное сопротивление статорной обмотки обычно может либо не учитываться (ввиду его малости), либо суммироваться с сопротивлением внешней цепи.
При анализе установившихся режимов
синхронные машины представляются
синхронными реактивными сопротивлениями
по продольной оси
![]() и по поперечной оси
и по поперечной оси![]() ,
включенными последовательно с ЭДС
,
включенными последовательно с ЭДС![]() и
и![]() ,
соответственно (рис. 2.6).
,
соответственно (рис. 2.6).
|
|
|
|
а) |
б) |

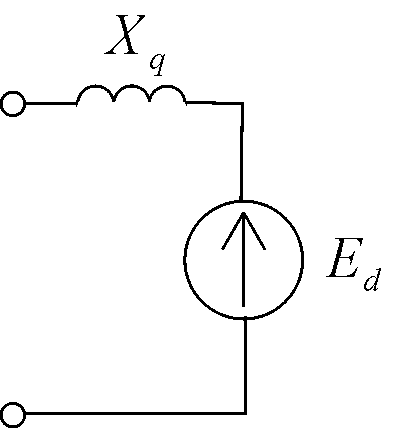
Рис. 2.6. Схемы замещения синхронной машины в установившемся режиме:
а - по продольной оси; б - по поперечной оси
В начальной стадии переходного процесса синхронная машина может быть представлена схемами замещения, включающими переходные и сверхпереходные сопротивления и ЭДС.
Сверхпереходное реактивное сопротивление по продольной оси
|
|
(2.1) |
 .
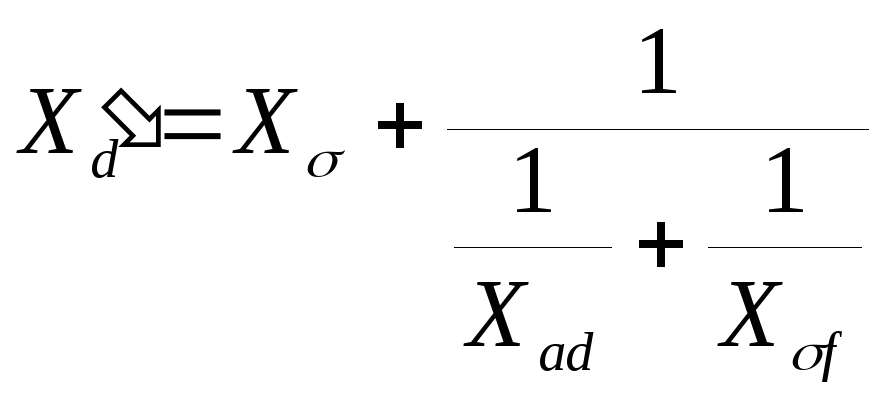
.Переходное реактивное сопротивление (без учета демпферной обмотки) по продольной оси
|
|
(2.2) |
 .
.Сверхпереходное реактивное сопротивление по поперечной оси
|
|
(2.3) |
 .
.
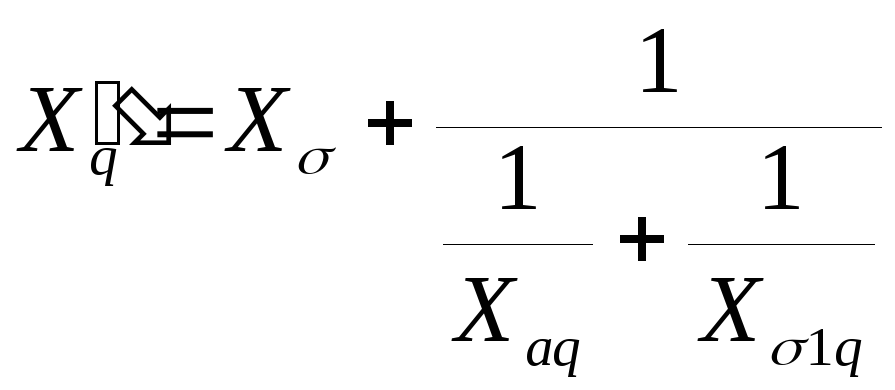
Переходное реактивное сопротивление
по поперечной оси
![]() .
.
Сопротивления
![]() ,
,![]() ,
,![]() ,
,![]() и
и![]() обычно приводятся в каталожных данных
двигателя или генератора.
обычно приводятся в каталожных данных
двигателя или генератора.
Предположим, что синхронный генератор подключен к узлу nэлектрической сети. ЭДС генератора в этом случае может быть определена с использованием выражения
|
|
(2.4) |
 ,
,
где
![]() - напряжение узловой точкиn;
- напряжение узловой точкиn;
![]() ,
,
![]() - мощности, поступающие к точкеnот этого генератора;
- мощности, поступающие к точкеnот этого генератора;
![]() ,
,![]() - сопротивления, включающие в себя
внутренние сопротивления генератора
- сопротивления, включающие в себя
внутренние сопротивления генератора![]() и сопротивления внешней сети от выводов
генератора до точкиn.
и сопротивления внешней сети от выводов
генератора до точкиn.
В зависимости от того, какая из ЭДС
генератора должна быть определена,
по-разному будет учитываться сопротивление
генератора
![]() .
Так, в установившемся режиме при
отсутствии системы автоматического
регулирования возбуждения (АРВ) генератор
обычно представляют ЭДС
.
Так, в установившемся режиме при
отсутствии системы автоматического
регулирования возбуждения (АРВ) генератор
обычно представляют ЭДС![]() ,
пропорциональной току возбуждения, за
сопротивлением
,
пропорциональной току возбуждения, за
сопротивлением![]() .
При АРВ пропорционального действия ЭДС
генератора принимают равной
.
При АРВ пропорционального действия ЭДС
генератора принимают равной![]() ,
а
,
а![]() .
Если генератор снабжен АРВ сильного
действия,
.
Если генератор снабжен АРВ сильного
действия,![]() и, соответственно,
и, соответственно,![]() .
.
Для явнополюсного синхронного генератора
необходимо его сопротивление
![]() умножить на коэффициент, отражающий
влияние явнополюсности, который может
быть принят равным 0,85-0,95 в зависимости
от типа машины и режима, в котором она
работает [1, с.264].
умножить на коэффициент, отражающий
влияние явнополюсности, который может
быть принят равным 0,85-0,95 в зависимости
от типа машины и режима, в котором она
работает [1, с.264].
При асинхронном режиме (![]() )
приближенные схемы замещения могут
быть получены из схем, изображенных на
рис. 2.5. Эти схемы аналогичны упрощенной
Г-образной схеме замещения асинхронного
двигателя. В некоторых случаях схему
замещения можно дополнительно упростить,
исключив ветвь намагничивания.
)
приближенные схемы замещения могут
быть получены из схем, изображенных на
рис. 2.5. Эти схемы аналогичны упрощенной
Г-образной схеме замещения асинхронного
двигателя. В некоторых случаях схему
замещения можно дополнительно упростить,
исключив ветвь намагничивания.