

2.3 Вибір підсилюючих та корегуючих елементів псспк
Вхідним сигналом підсилювача є вихідна напруга ЦАП, а вихідним - напруга керуван-ня двигуном. Тому підсилювач повинен підсилювати вхідну напругу як за величиною, так і за потужністю, тобто повинен складатися з каскадів підсилення напруги (попередній підсилювач (ПП)) та потужності ( підсилювач потужності (ППТ)). При побудові підсилювача враховують тип вибраного двигуна та напругу живлення ЦАП. В якості попередніх підсилювачів напруги реко-мендується використовувати підсилювач на інтегральних схемах (операційні підсилювачі). Під-силювачі потужності можна побудувати з використанням транзисторних ключів або тиристорних перетворювачів.
До особливості підсилювачів ПССПК можна віднести порівняно великий рівень вхідного сигналу від ЦАП. При цьому рівень перешкод виявляється незначним, і від підсилювача, як правило, не вимагається великих селективних властивостей.
При використанні виконавчого двигуна постійного струму дещо ускладнюється схема під-силювача внаслідок необхідності реверсивного керування. З цієї точки зору перевагу слід надати використанню асинхронних двофазних виконавчих двигунів, що дозволяє одержувати найбільш прості схеми підсилювачів з невеликим числом підсилюючих елементів.
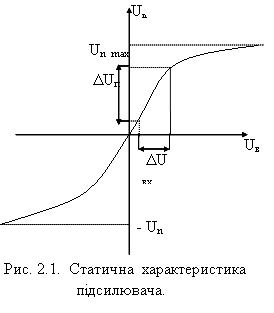
Підсилювач постійного струму може мати порівняно вузьку полосу пропускання - до 50 -100 Гц. Підсилювач змінного струму підсилює сигнал фіксованої частоти, і тому тут також відсутня вимога широкополосної частотної характеристики підсилювача. Статична характери-стика підсилювача має вигляд характеристики лінійної ланки з насиченням (рис.2.1).
Коефіцієнт підсилення підсилювача в зоні лінійності визначається з виразу:
kп = Uп/ Uвх (2.12)
де Uп - зміна вихідної напруги підсилювача;
Uвх -зміна напруги на вході підсилювача.
Інерційність підсилювача та цифрової частини ПССПК звичайно значно менша за інерційність виконавчого двигуна, тому їх динамічні характеристики мають незначний вплив на динаміку слідкуючої системи.
Найважливішими елементами ПССПК є корегувальні пристрої, які повинні проектуватися, виходячи з заданих вимог до динамічних характеристик процесу позиціювання. Характерною особливістю цих вимог є необхідність одержання аперіодичного або слабоколивального (з одним напівколиванням) перехідного процесу, що забезпечує мінімальний час відпрацювання заданої команди, і тим самим підвищує продуктивність установки, в якій застосована ПССПК.
Серед усіх можливих коригувальних пристроїв найбільш часто використовуються пристрої типу зворотніх зв’язків (зворотний зв’язок за швидкості, струмом та ін.).
Зворотний зв’язок за швидкістю може бути реалізований за цифровим сигналом датчика переміщення, але це ускладнює цифрову частину ПССПК. Значно простіше ввести швидкісний зворотний зв’язок за допомогою неперервних (аналогових) пристроїв - тахогенераторів або тахо-метричних мостових схем.
Залежно від виду напруги сигналу похибки в прямій ланці слідкуючої системи застосо-вуються малогабаритні тахогенератори змінного або постійного струму.
Використання тахогенераторів потребує введення додаткових конструктивних елементів в кінематичну ланку ПССПК, що може призвести до помітного збільшення моменту інерції та моменту опору, оскільки тахогенератор, через мале значення коефіцієнта передачі, повинен встано-влюватися безпосередньо на вал виконавчого двигуна. Цього можна уникнути, якщо замість тахогенератора використовувати мостові тахометричні схеми. Однак, треба відмітити, що тахометричний міст потребує більш трудомісткого підстроювання, ніж схема зворотного зв’язку з тахогенератором.
Ефективність дії швидкісного зворотнього зв’язку можна оцінити величиною коефіцієнту передачі внутрішнього контура
kк=kз.з kз.п,
де kз.з - коефіцієнт зворотнього зв’язку за швидкістю двигуна; kз.п - коефіцієнт підсилення частини підсилювача, охопленої зворотним зв’язком. На практиці можна одержати величину kк для тахогенератора - 50-100, а для тахометричного мосту - 10-15 .
Зворотний зв’язок за струмом виконавчого двигуна будується за допомогою різноманітних датчиків струму: шунтів, струмових трансформаторів, датчиків Холла та ін.. Наявність зворотних зв’язків необхідно враховувати при проектуванні попереднього підсилювача ПСС, тому на пра-ктиці остаточне складання схеми та розрахунок ПП проводиться після дослідження динаміки ПСС і синтезу коригувальних пристроїв. При цьому ПП повинен мати додаткові входи для сигналів зворотного зв’язку постійного або змінного струму.
При виконанні даного курсового проектування на етапі розроблення аналогової (виконавчої) частини ПССПК рекомендовано на відносно малих рівнях потужності використовувати двофазні асинхронні двигуни і двотактні транзисторні підсилювачі потужності змінного струму, які працюють у класі В (однонапівперіодний режим). При великих рівнях потужності застосовуються двигуни постійного струму з незалежним збудженням.
В якості підсилювача потужності для двигунів постійного струму використовується мосто-вий підсилювач з транзисторами в ключовому режимі або тиристорний реверсивний перетворю-вач (при відносно високому рівні потужності).
Необхідний із умови точності позиціювання коефіцієнт підсилення системи забезпечує попередній підсилювач, виконаний на операційних підсилювачах. У ПП вводяться також вихідні сигнали стабілізаційних ланок зворотного зв’язку за швидкостю (з тахогенератора) та струмом (з шунта) двигуна, які служать для забезпечення аперіодичної стійкості ПСС.
Зворотний зв’язок за струмом передбачається тільки в ПСС з двигунами постійного струму. В ланку ЗЗI (див. рис. В1) – вводиться нелінійність, яка різко збільшує коефіцієнт зворотного зв’язку при перевищенні струмом двигуна порогового значення.
За рахунок цього відбувається обмеження струму в процесах пуску та гальмування.
Можливі комбінації параметрів ПСС, коли потреба в тому чи іншому стабілізаційному зво-ротному зв’язку відпадає, коли в ПСС з двигуном постійного струму в стабілізаційному зворотному зв’язку за струмом немає потреби, на ланку ЗЗI покладаються лише функції обмеження струму.
Похибка позиціювання ПССПК визначається класом точності обертового трансформатора, що входить до складу ЦЧ; кроком дискретизації в ЦЧ; статичним моментом Мс опору; кое-фіцієнтом підсилення тракту ЦАП-ПП-ППТ.