

1.3 Вибір структури зрівняльного пристрою
Можливі варіанти побудови зрівняльного пристрою визначаються такми факторами:
тип датчика зворотного зв’ язку;
прийнята при програмуванні система числення ( двійковаа, двійково-десятична);
спосіб задання програми ( в абсолютних координатах, у приростах).
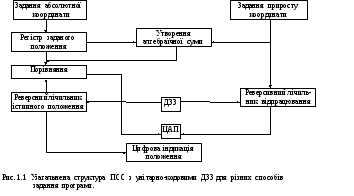
При використанні унітарно-кодових ДЗЗ прийнято розрізняти такі способи виявлення розузгодження:
порівняння інформації, що вводиться в регістр, за допомогою схеми порівняння;
введення інформації безпосередньо в лічильник відпрацювання, який сам виконує функцію елемента порівняння.
На рис.1.1 зображено різні варіанти побудови ПСС з унітарно-кодовим ДЗЗ в залежності від способу задання програми.
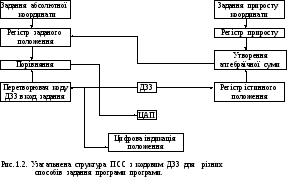
Аналогічна структура, тільки для кодових ДЗЗ, показана на рис.1.2.
Аналіз наведених структур свідчить, що при заданні програми у вигляді абсолютних значень координат необхідно застосовувати кодові ДЗЗ ( одержуємо більш просту схему), а при заданні приросту координат - унітарно-кодові ДЗЗ. Взагалі, у випадку використання замкнених позиційних систем виявлення розузгодження між заданим та дійсним положенням робочого органу за допомогою реверсивного лічильника є найбільш раціональним рішенням.
1.4. Побудова перетворювача цифра-аналог (цап)
Для перетворення цифрової та логічної інформації в напругу керування двигуном ПСС застосовується ЦАП. При виборі конкретної статичної характеристики ЦАП необхідно враховувати її вплив на такі параметри: точність переміщення, швидкодія системи при відпрацюванні стрибка; стійкість замкненої системи.
Типова залежність між вихідною напругою ЦАП Uп і розузгодженням N ПССПК, вираженим у цифровій формі; зображена на рис. 1.3.
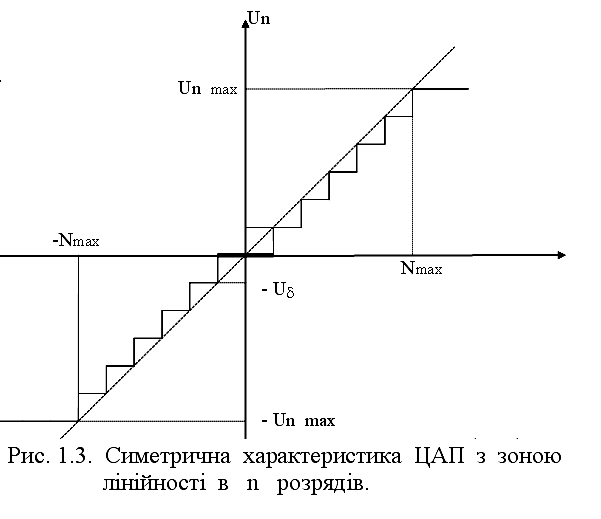
Рис.
1.3. Симетрична характеристика ЦАП з
зоною
лінійності в n
розрядів.
Вона характеризується квантуванням за рівнем, що обумовлено дискретністю вхідного сигналу. Для забезпечення заданої точності переміщення величина одного ступеня напруги ( дискретність квантування ) U вибирається такою, щоб при мінімальній величині розузгодження, рівній одиниці молодшого розряду (N=1) напруга, що подається на двигун, була не меньшою його напруги зрушення Uзр. Максимальна вихідна
напруга Un mах визначається вибором типу виконавчого двигуна ПСС. Тоді максимальне число розрядів перетворювача:
N mах = Un mах/ U
Слід зазначити, що на практиці можуть застосовуватись ЦАП, які реалізують багато інших характеристик, що відрізняються від характеристики, зображенної на рис. 1.3 [1]
При виконанні даного курсового проектування на етапі синтезу цифрової частини ПССПК передбачається, що позиція задається програмним пристроєм у вигляді двійковогоого коду.
Рекомендовано фазо-імпульсну систему вимірювання позиційного кута, коли в якості ДЗЗ використовується індукційнийдатчик типу обертовий трансформатор, що працює в фазовому індикаторному режимі, а значення фази вихідного синусоїдального сигналу за допомогою АЦП перетворюється в унітарний код ( тобто в вигляді пакету імпульсів).
В якості пристрою зрівнювання використовується двійковий реверсивний лічильник. Застосовується ЦАП, що реалізує характеристику, зображену на рис. 1.3.
Цифрова частина ПСС реалізується на серійних елементах мікроелектроніки.
Мається на увазі, що частота зрізу лінеаризованої ПСС набагато менша за частоту чергування імпульсів керування асинхронним двигуном ( у випадку його використання), а кванти за рівнем у цифровій частині малі і ними можна знехтувати. Тому при аналізі процесів у ПСС можна застосовувати методи неперервних систем.