

3.10.2 Принципы построения структурных схем систем апч
Объектом подстройки частоты в системе АПЧ может быть автогенератор или местный гетеродин. Местный гетеродин (МГ) является более выгодным объектом изменения частоты по быстродействию в амплитудном режиме, полосе схватывания и уровню потребляемой мощности исполнительного устройства.
Однако в двухканальных системах АПЧ с переключением объекта перестройки точная АПЧ может осуществляться путем изменения частоты автогенератора. Так, например, решается задача в РЛС 5Н84А.
В качестве примера рассмотрим одноканальную систему АПЧ с подстройкой частоты местного гетеродина (рис.3.60).
В системах АПЧ в качестве исходных параметров используются частоты генератора и местного гетеродина, разность которых должна быть равной номинальному значению промежуточной частоты. Практически проще производить измерение ухода частот высокочастотных сигналов на промежуточной частоте, при этом значительно легче добиться высокой чувствительности системы к расстройке.
Преобразование и выделение разностной (промежуточной) частоты производится смесителем АПЧ, аналогичным смесителю сигналов в тракте приема. Разница заключается лишь в том, что на смеситель сигнала в тракт приема подается отраженный сигнал и сигнал местного гетеродина, а на смеситель АПЧ – сигнал местного гетеродина и передатчика в момент его работы. Сигнал передатчика подается через аттенюатор с тем, чтобы уменьшить его мощность до величины сравнимой с мощностью гетеродина.
Разностный сигнал на выходе смесителя усиливается вспомогательным УПЧ. Полоса пропускания УПЧ должна быть несколько больше полосы захвата. Непосредственное измерение ухода частоты и выработку соответствующего управляющегося напряжения ошибки осуществляет частотный дискриминатор, который преобразует радиоимпульсы разностной частоты в управляющее напряжение. Величина этого управляющего напряжения зависит от величины расстройки, а полярность от знака расстройки.
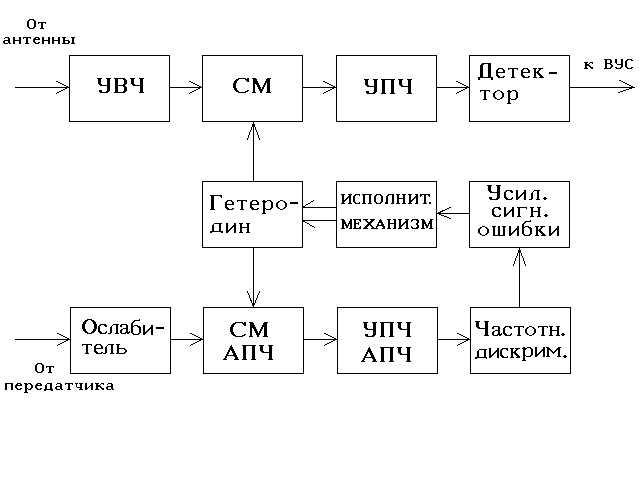
Рис.3.60. Одноканальная система АПЧ.
В основном, используются два типа частотных дискриминаторов:
с взаимосвязанными настроенными контурами;
с взаиморасстроенными параллельными контурами.
Сигнал на выходе частотного дискриминатора представляет собой кратковременный видеоимпульс малой амплитуды, в то время как для исполнительного устройства необходим постоянно действующий сигнал рассогласования требуемого уровня. Поэтому импульсное напряжение с выхода дискриминатора усиливается по мощности и преобразуется к виду необходимому для работы исполнительного элемента.
Если гетеродином является клистрон, то на его отражателе вырабатывается постоянное на данный период управляющее напряжение.
Если исполнительный элемент – двигатель переменного тока, то вырабатывается переменное напряжение, амплитуда которого задана уходом частоты от промежуточной, а фаза – напряжением ухода по кривой дискриминатора (рис.3.57). Исполнительное устройство изменяет частоту гетеродина в направлении уменьшения сигнала ошибки до уровня, определяемого точностью системы АПЧ.
Если в РЛС используется система СДЦ с внутренней когерентностью, то применяют, как правило, прерывистую АПЧ, что предотвращает, как отмечалось выше, паразитные фазовые набеги, возможные при непрерывной работе АПЧ. В этом случае прерывистые системы АПЧ имеют в своем составе программное устройство, которое разрывает контур АПЧ и включает его на короткое время. Например, в РЛС ПРВ-13 АПЧ включается на 0,5 секунд через каждые 22 секунды.
За короткое время работы система АПЧ успевает подстроить местный гетеродин. Нормальная работа системы СДЦ практически не нарушается, поскольку большую часть времени боевой работы РЛС местный гетеродин не подстраивается.
Прерывистая система АПЧ применима при условии высокой стабильности местного гетеродина, когда частота его за время между двумя воздействиями АПЧ не выходит за пределы допустимых значений.
Таким образом, к достоинствам одноканальной системы АПЧ относится простота и возможность работы в тех случаях, когда передатчик и приемник разнесены и находятся на разных транспортных единицах (объектах). Недостатки системы заключаются в том, что, во-первых, теряется информация о доплеровском смещении частоты сигнала, во-вторых, система оказывается подверженной воздействию внешних помех и при высоком их уровне может ложно подстраивать частоту гетеродина – не по частоте сигнала, а по частоте помехи.
Двухканальная система АПЧ (автономная система АПЧ) с переключением объекта подстройки применяется, например, в РЛС П-18 и 5Н84А, имеющих внутрикогерентную аппаратуру СДЦ, систему перестройки со значительной остаточной ошибкой и сравнительно узкополосный приемник (рис.3.61).
Режим грубой АПЧ включается при больших расстройках. При этом схема переключения канала не срабатывает и напряжение грубого дискриминатора поступает на исполнительное устройство, подстраивающее гетеродин.
По мере подстройки увеличивается напряжение на выходе резонансного усилителя и когда это напряжение достигнет определенного уровня срабатывает схема переключения каналов, которая включит режим переходной АПЧ на время 0,5 с.
Дискриминационные характеристики систем АПЧ РЛС 5Н84А грубого и точного каналов показаны на рис.3.62.
В этом режиме используется сигнал точного дискриминатора, но подстраивается по-прежнему гетеродин. Через 0,5 секунд автоматически включается режим точной АПЧ, при котором используется сигнал точного дискриминатора, то подстраивается генератор СВЧ. Возможны и другие варианты двухканальных схем АПЧ, например, электронная АПЧ клистрона.

Рис.3.61. Двухканальная система АПЧ.
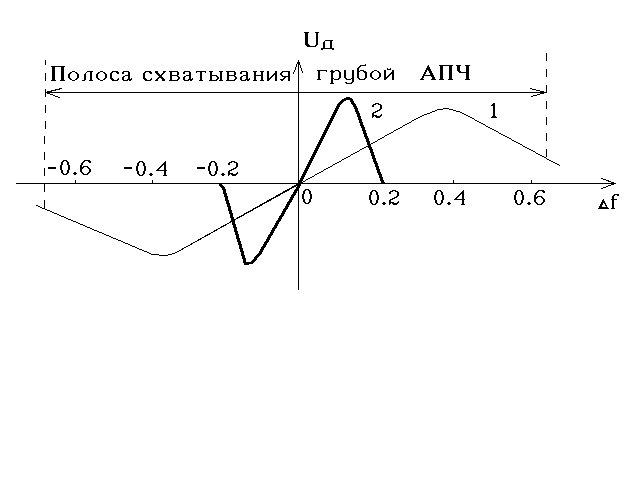
Рис.3.62. Дискриминационные характеристики систем АПЧ РЛС 5Н84А грубого и точного каналов
Таким образом, двухканальная система АПЧ разностной частоты свободна от большинства перечисленных недостатков одноканальной системы АПЧ. Она работает, используя часть мощности передатчика, отбираемой от последнего через аттенюатор, и не подвержена воздействию помех. Однако при этой схеме получение информации о доплеровском смещении частоты сигнала, отраженного от движущейся цели, невозможно, ибо хотя при изменениях частот передатчика и гетеродина разностная частота и будет поддерживаться постоянной со сколь угодно малой погрешностью, но изменение частоты передатчика неизбежно приведет к изменению доплеровского смещения частоты даже при постоянной скорости цели. Поэтому при необходимости точного определения скорости цели следует применять отдельные системы стабилизации частот передатчика и гетеродина.