

3.10 Система апч рлс
3.10.1 Назначение, классификация и основные характеристики систем апч
В РЛС с передатчиком на автогенераторе в выходной ступени ряд дестабилизирующих факторов приводит к быстрым и медленным изменениям несущей частоты. Например, абсолютный уход по частоте в 10 см диапазоне может составлять несколько МГц. В этом случае при постоянстве частоты гетеродина спектр сигнала выйдет за пределы полосы пропускания УПЧ приемника и сигнал будет значительно подавлен или потерян.
Существующие в настоящее время устройства АПЧ позволяют скомпенсировать нестабильности, частоты которых не превышают несколько мегагерц.
Назначение. Система АПЧ обеспечивает поддержание номинального значения промежуточной частоты приемника с заданной точностью путем автоматического изменения частоты генератора передатчика и (или) местного гетеродина. Другими словами, система АПЧ предназначена для стабилизации частоты колебаний простых сигналов и заданных законов изменения частоты сложных сигналов.
Упрощенная схема одноканальной АПЧ показана на рис.3.55. В смесителе (СМ) выделяются колебания разностной частоты подстраиваемого и опорного генераторов. После усиления в УПЧ это колебание подается в системе ЧАПЧ на частотный дискриминатор (ЧД), а в системе ФАПЧ - на фазовый дискриминатор (ФД). Если в области устойчивой работы системы частота (фаза) преобразуемого колебания отличается от переходной частоты ЧД (фазы эталонного сигнала), то на выходе дискриминатора появляется напряжение сигнала ошибки. После фильтрации в фильтре нижних частот (ФНЧ) и усиления в усилителе сигнала ошибки (УСО) это напряжение подается на управляющий частотой элемент, который изменяет частоту колебаний генератора в сторону уменьшения отклонения, возникшего в результате воздействия помех. Конкретная схема системы АПЧ определяется предъявляемым к ней требованиями и зависит от типа РЛС и места в ней устройства автоподстройки.
Существующие системы АПЧ можно классифицировать по следующим признакам:
по принципу действия;
по виду дискриминатора;
по параметру, постоянство которого обеспечивает система;
по типу используемого управителя;
по способу настройки стабилизированного генератора на требуемую частоту;
по виду эталона частоты;
по скорости воздействия на исполнительное устройство.
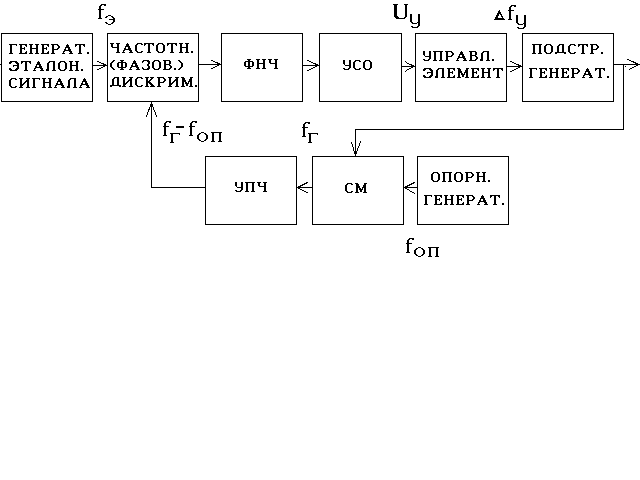
Рис.3.55. Упрощенная схема одноканальной АПЧ.
По принципу действия системы АПЧ различают:
непрерывные (аналоговые);
импульсные;
цифровые;
аналого-цифровые.
По виду дискриминатора системы АПЧ разделяются на два класса:
системы частотной автоподстройки (ЧАП);
системы фазовой автоподстройки (ФАП).
В системе ЧАП применяют частотный дискриминатор (ЧД), реагирующий на величину и знак отклонения стабилизирующей частоты fг от эталонной fэ и вырабатывающий напряжение сигнала ошибки Uд, определяемое величиной и знаком этого отклонения f = fэ − fг, т.е. Uд = f(f).
В системе ФАП применяют фазовый дискриминатор (ФД), реагирующий на величину и знак отклонения фазы стабилизируемых колебаний г от фазы эталонных колебаний э и вырабатывающий напряжение сигнала ошибки Uд, зависящее от разницы фаз = э – г, т.е. Uд = f().
По параметру, постоянство которого обеспечивает система различают:
система автоподстройки разностной частоты;
система автоподстройки абсолютного значения частоты.
Система автоподстройки разностной частоты обеспечивает постоянство разности частот передатчика РЛС и гетеродина приемника и равенство этой разности номинальному значению промежуточной частоты fпр с допустимой ошибкой.
По способу получения управляющего напряжения такая система относится к совмещенным или одноканальным. Она поддерживает постоянной разность частот приходящего сигнала и гетеродина, например, fс – fг. Эталоном частоты в ней является переходная частота ЧД, т.е. такая частота в пределах полосы пропускания дискриминатора, на которой выходное напряжение его равно нулю.
Существуют и двухканальные системы АПЧ. Принципы их работы будут рассмотрены ниже.
По типу используемого управителя системы АПЧ могут быть:
электронные, т.е. такие, в которых управляющей частотой стабилизируемого генератора осуществляется чисто электронным путем, изменением напряжения или тока (например, изменением напряжения на отражателе клистрона генератора);
электромеханические, в которых управление частотой осуществляется с помощью электрических моторов или соленоидов, механически изменяющих параметры колебательных контуров;
комбинированные, сочетающие и электронную и электромеханическую настройку.
Электронные системы в основном используются в системах АПЧ РЛС, работающих без защиты от интенсивных помех, или в РЛС с СДЦ в амплитудном режиме.
Комбинированные системы предполагают использование электронного управления в амплитудном режиме и электромеханического управления в когерентном режиме.
По способу настройки стабилизируемого генератора схемы АПЧ различают: беспоисковые, или следящие; поисковые.
В следящей системе необходима ручная предварительная подстройка и поиск частоты сигнала вручную после потери его системой. В поисковой системе эти операции автоматизированы.
По виду эталона частоты системы АПЧ могут быть:
с активными эталонами, которыми являются высокостабильные маломощные генераторы (кварцевые или молекулярные);
с пассивными эталонами, роль которых выполняют высокодобротные резонансные системы или газовые приборы с узким спектром поглощения на определенной частоте.
По скорости воздействия на исполнительное устройство системы АПЧ могут быть: инерционные; быстродействующие; «мгновенные»; прерывистые.
Рис.3.56 отражает возможность различных систем АПЧ по времени регулирования. Сплошной линией показан энергетический спектр флюктуаций частоты нестабилизированного автогенератора. Пунктирными линиями показаны возможности уменьшения его уровней различными системами АПЧ.
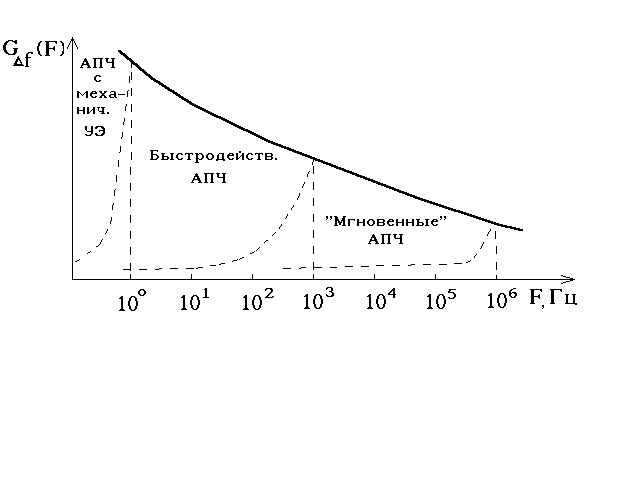
Рис.3.56. Возможности различных систем АПЧ по времени регулирования.
Для систем АПЧ с механическим управлением элементов характерно большое время регулирования tАПЧ > 0.5...1 с. (малое быстродействие), поэтому они снижают лишь низкочастотные флюктуации частот F < 1...2 Гц. Быстродействующие системы АПЧ подавляют составляющие спектра флюктуаций частоты колебаний автогенератора до частот F ≤ 1...5 кГц. Как известно, наличие в спектрах сигналов передатчика или гетеродина флюктуационных составляющих на этих частотах приводит к ухудшению эффективности работы систем СДЦ когерентно-импульсных РЛС (снижению коэффициента подпомеховой видимости). «Мгновенные» АПЧ используют для уменьшения отклонения частоты в пределах импульса при формировании сложных, например, ЛЧМ сигналов. Время регулирования таких систем составляет 0.5...1 мкс.
Эффективность работы системы АПЧ оценивается по частотной характеристике, выражающей зависимость напряжения от выходе системы от величины расстройки от номинальной частоты.
К основным характеристикам системы АПЧ относятся: полоса схватывания (полоса захвата) ПАПЧ; точность подстройки частоты fАПЧ; скорость VАПЧ или время автоподстройки tАПЧ.
Полоса схватывания – это диапазон частот, в пределах которого обеспечивается беспоисковая автоподстройка частоты генератора с заданной точностью. Значение полосы схватывания определяется полосой пропускания дискриминатора (рис.3.57).
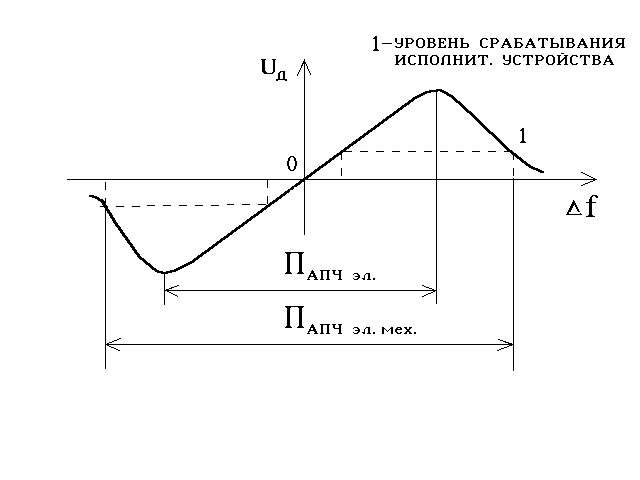
Рис.3.57. Характеристика дискриминатора системы АПЧ.
При наличии в РЛС системы перестройки рабочей частоты полоса схватывания должна удовлетворять условию
ПАПЧ |fСП г| + |fСП мг|, (3.34)
где fСПг, fСПмг – максимальные ошибки установки частоты соответственно генератором передатчика и местного гетеродина при перестройке рабочей частоты РЛС.
При отсутствии системы перестройки
ПАПЧ |fmax Г| + |fmax МГ|, (3.35)
где fmax Г, fmax МГ – максимально возможные уходы частот соответственно генератора передатчика и местного гетеродина из-за дестабилизирующих факторов.
При необходимости обеспечения больших значений ПАПЧ предпочтение следует отдавать электромеханическим системам АПЧ, поскольку в электронных системах АПЧ увеличение ПАПЧ связано с труднореализуемым противоречием между диапазоном электронной перестройки и стабильности генераторов передатчика и местного гетеродина.
Точность подстройки частоты характеризуется статической ошибкой системы АПЧ, которая определяется соотношением
f = fнач/(1 + Kос·Sд·Sу) , (3.36)
где fнач – начальная расстройка частоты стабилизируемого генератора относительно частоты эталона; Kос – результирующий коэффициент усиления разомкнутой цепи обратной связи системы; Sд, Sу – крутизна характеристики соответственно дискриминатора и управителя.
Из соотношения (3.36) следует, что для повышения точности автоподстройки частоты необходимо помимо всего прочего увеличивать крутизну характеристики дискриминатора. Однако при этом уменьшается полоса пропускания дискриминатора, а следовательно, и полоса схватывания ПАПЧ. Для разрешения этого противоречия используют системы АПЧ с двумя петлями обратной связи, соединенные с одним управителем (рис.3.58), т.е. двухканальные системы АПЧ.
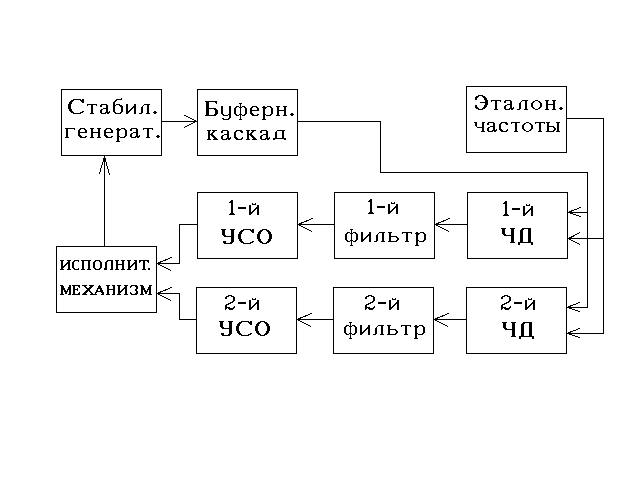
Рис.3.58. Система АПЧ с двумя петлями обратной связи
Первая петля обратной связи имеет дискриминатор с широкой полосой пропускания и полосой схватывания, превышающей диапазон возможных начальных расстроек генератора. Ввиду малой крутизны характеристики дискриминатора остаточная расстройка при работе этой петли ОС будет велика, но всегда меньше половины полосы схватывания второй петли ОС, имеющей дискриминатор с узкой полосой пропускания, большей крутизной и, следовательно, обеспечивающей значительно меньшую максимальной остаточную расстройку.
Скорость автоматической подстройки частоты является одной из важнейших характеристик систем АПЧ. Требования к ней определяются режимом работы РЛС.
В амплитудном режиме ограничений на скорость АПЧ нет. Современные электронные системы АПЧ при работе РЛС в амплитудном режиме (без СДЦ) обеспечивают скорость автоподстройки, при которой
tАПЧ = (0,5....0,7)·и,
где tАПЧ – время, в течении которого начальная расстройка сводится к остаточной; и – длительность зондирующего импульса.
При работе РЛС в когерентном режиме изменение частоты генераторов передатчика или местного гетеродина в процессе автоподстройки приводит к расширению спектра флюктуаций сигналов на входе системы СДЦ и, следовательно, к уменьшению значения реализуемого коэффициента подавления сигналов пассивных помех.
Поэтому в когерентном режиме работы РЛС допустимая скорость АПЧ ограничивается значением, при котором реализуемый коэффициент подавления сигналов пассивных помех уменьшается в допустимое число раз. Это условие представляется в виде
![]() (3.37)
(3.37)
если в процессе автоподстройки изменяется частота генератора передатчика, и
![]() (3.38)
(3.38)
если подстраивается местный гетеродин.
Из соотношений (3.37) и (3.38) следует, что скорость АПЧ при подстройке генератора передатчика ограничивается условием
![]() (3.39)
(3.39)
а при подстройке местного гетеродина
![]() (3.40)
(3.40)
Сопоставляя эти соотношения, можно сделать вывод, что допустимая скорость при подстройке генератора передатчика в Q-раз выше, чем при подстройке местного гетеродина. Это означает, что при работе РЛС в когерентном режиме предпочтение следует отдавать АПЧ генератора передатчика.
В случаях, когда время автоподстройки из-за наличия ограничений на допустимую скорость работы АПЧ оказывается недопустимо большим, применяется прерывистый режим работы системы АПЧ.
Временная диаграмма (рис.3.59) поясняет сущность работы прерывистой системы АПЧ.
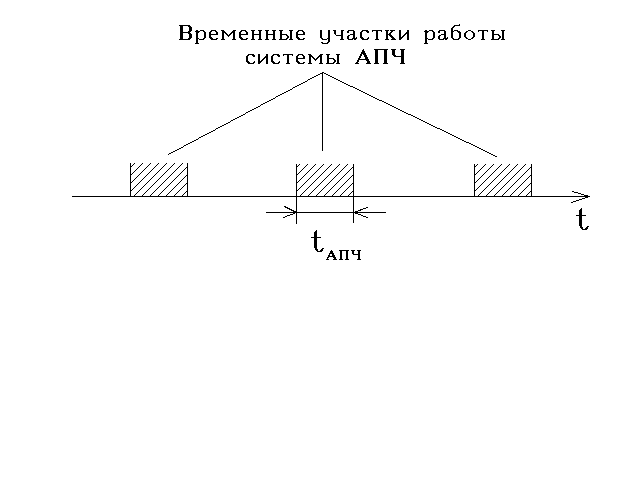
Рис.3.59. Временные участки работы системы АПЧ.
Во время работы системы АПЧ система СДЦ не работает. Интервал времени между очередными моментами включения система АПЧ либо устанавливается постоянным с учетом скорости ухода частот генератора передатчика и местного гетеродина из-за дестабилизирующих факторов, либо изменяется автоматически. В последнем случае момент включения системы АПЧ определяется моментом начала выхода расстройки по частоте за допустимый предел.
Таким образом, основные требования к системе АПЧ заключаются в следующем: обеспечение заданной стабильности частоты (фазы) простых и сложных сигналов; реализация необходимого быстродействия; устойчивость; способность работать как при малых, так и при больших начальных расстройках; высокая надежность; простота конструкций; приемлемая стоимость эксплуатации.