

1.2.2. Гидравлические экскаваторы.
Масса экскаватора определяется из условия устойчивости машины (отсутствия сползания юзом) от горизонтальной составляющей силы копания Р01[6, 4]:
Р01max ≤ μ×m×q,
где μ = 0,7 — расчетное значение коэффициента трения ходового оборудования о грунт;
m×q— вес экскаватора;G=m×q.
![]()
По заданной величине вместимости ковша q из пропорции с прототипомqпможно получить вес экскаватора:
![]() ,
следовательно,
,
следовательно,
![]() .
.
Для ковша обратной лопаты (Рис. 4), имеющего q = 0,3...3,2 м3, ВНИИСтройдормаш рекомендует следующие параметры:
![]() ;
;
![]() - 0,26;
- 0,26;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
![]()
Основные параметры погрузочного ковша можно определить но следующим соотношениям:
![]() —длина ковша,
м;
—длина ковша,
м;
![]() —длина днища, м;
—длина днища, м;
R = LК – Lg — радиус задней стенки, м;
bK =1,35 LК — ширина ковша, м.
Для телескопического вида рабочего оборудования рекомендуется брать задний угол; при копании поворотом ковша γ = 25...30°, при втягивании подвижной стрелы γ1= 5° радиус ковша
![]()
где КН = 0,7 — коэффициент наполнения ковша.
Величина
угла Ψ =
30°,
![]() .
Для данных значенийисходных
величин
.
Для данных значенийисходных
величин
![]() .
.
Как видно, при этом bК = RK.
Для
планирующего ковша при всех одинаковых
величинах
![]()
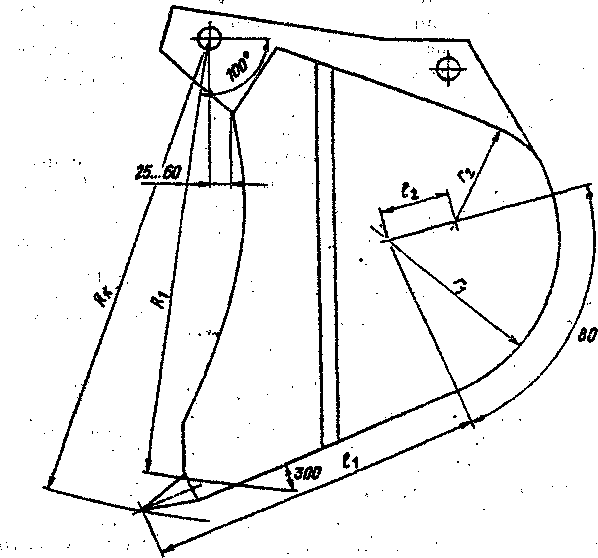
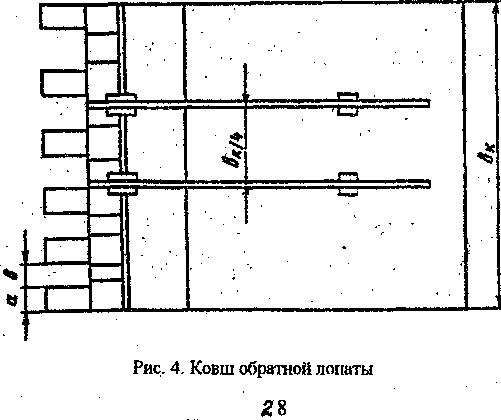 Рис.
4. Ковш обратной лопаты
Рис.
4. Ковш обратной лопаты
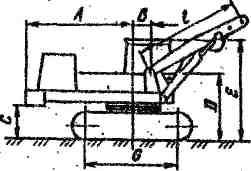
Определение размеров поворотной платформы
Диаметр
опорно-поворотного круга Доп,
м, на стадии эскизного проектирования
определяется по эмпирической зависимости:
![]() .
.
Площадь опорной поверхности гусеничного ходового оборудования
![]() ,
,
где [p] ─допускаемое давление на грунт; для экскаваторов 3-, 4-, 5- и 6-й размерных групп должно быть соответственно не более [5; 6,3; 9; 11,2]104 Па.
База гусеничного экскаватора
![]() ,
,
где
![]() ─ширина гусеничной
ленты, м.
─ширина гусеничной
ленты, м.
Колея
экскаватора
![]() ;
высота гусеничного хода
;
высота гусеничного хода![]() .
.
Для колесного экскаватора принимают К = 2.200...2.400 мм, база примерно равна базе гусеничного экскаватора.
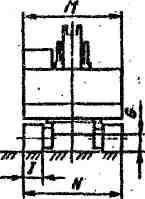
Координаты оси крепления рабочего оборудования к платформе Хс и Ус для оборудования прямого и обратного действия принимают следующими:
![]() ;
;
![]() .
.
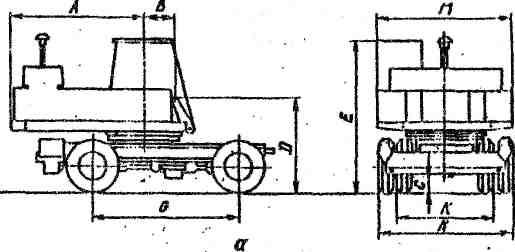
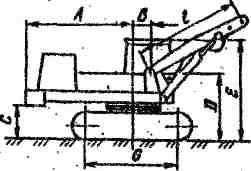
Размеры собственно базовой машины и базовой машины с рабочим оборудованием представлены соответственно: на колесном ходу — рис. 5,а, 6,а; на гусеничном ходу — рис. 5,б, 6,б.
1.4. Расчет параметров многоковшовых экскаваторов
1.4.1. Цепной траншеекопатель.
Для гравитационной разгрузки ковшей рекомендуется брать скорость ковшовой цепиVц= 0,8...1,2 м∙с-1. Число ссыпок ковшей в минуту выбирают в диапазонеnc= 40...60.
Следовательно, шаг расстановки ковшей будет определяться по формуле
![]() .
.
Параметры
ковша приблизительно можно выбрать
следующим
образом: ширина ковша bк
= 0,9b,
где b
— ширина траншеи; высота
ковша hк
= 0,5![]() ,
где
,
где![]() —
длина ковша; длина ковша определяется
по известным величинам bк
и q
из выражения bк
= 0,5
—
длина ковша; длина ковша определяется
по известным величинам bк
и q
из выражения bк
= 0,5![]() ,
,
следовательно,
![]() ,
,
а
б
Рис.5. Базовые параметры одноковшового экскаватора:
а ─ на колёсном ходу; б ─ на гусеничном ходу
Длина рамы рабочего органа lр определяется из условия возможности разработки на заданной глубине h и выгрузки грунта на определенной высотеho.
![]() ,
,
где Дзв
— диаметр звёздочки;![]() ,
,
tц — шаг ковшовой цепи;
z3 — число зубьев звездочки (z3 = 6... 10).
Длина ковшовой цепи lц = 2lр + πДЗв .
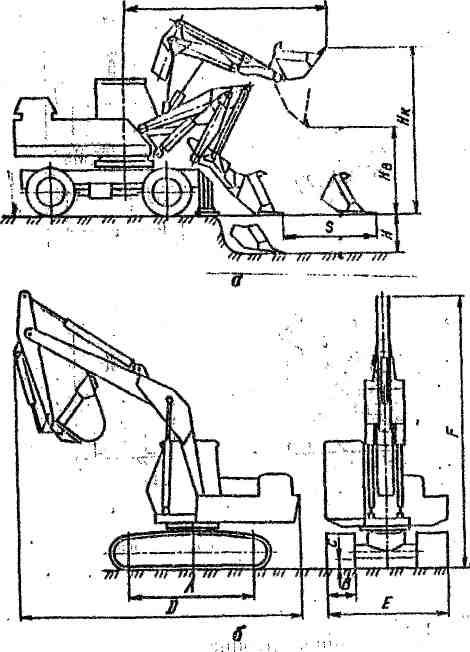
Рис. 6. Параметры одноковшового экскаватора с рабочим оборудованием:
а ─ на колесном ходу; б ─ на гусеничном ходу