

3 Визначення параметрів об’єкта регулювання
3.1 Розрахунок параметрів якірного кола
Активний опір якірного кола:
Rя =βт(Rя 15+ Rдп+ Rком)=1.24·(0.00762+0.00164+0.00451)= 0,0171 Ом. (3.1)
де Rя 15 – опір обмотки якоря при 150С;
Rдп – опір додаткових полюсів при 150С;
Rком – опір компенсаційної обмотки при 150С;
βт=1.24 – коефіцієнт, враховує зміну опору під впливом температури.
Активний опір фази трансформатору:
![]() (3.2)
(3.2)
Фіктивний опір, визваний комутацією тиристорів:
![]() (3.3)
(3.3)
Активний опір шин та вимірювальних шунтів:
Rш=0.1·RЯ=0.1·0,0171=0.00171 Ом. (3.4)
Повний активний опір якірного кола:
RЯΣ= RЯ+ RТР+ RФ+ RШ=0.0171+0.00234+0.00953+0.00171 =0.031 Ом. (3.5)
Номінальна швидкість двигуна:
![]() (3.6)
(3.6)
Індуктивний опір якірного кола двигуна:
![]() (3.7)
(3.7)
де К=0.2 – коефіцієнт для компенсованих машини.
![]() (3.8)
(3.8)
де m – пульсність перетворювача;
f – частота живильної мережі.
Мінімальна швидкість двигуна:
![]() (3.9)
(3.9)
Стала двигуна:
![]() (3.10)
(3.10)
Максимальний кут регулювання:
(3.11)
Повна необхідна індуктивність якірного кола:
![]() (3.12)
(3.12)
Індуктивність згладжуючого дроселя:
LДР=LΣ необ – LЯ=3.5·10-4–11,310-4= –0.00075 Гн. (3.13)
Оскільки LДР<0, тому необхідність встановлення дроселя відсутня.
Повна індуктивність якірного кола:
LЯ= LЯД+ LТР=1,1·10–3+3·10–5=1,13 мГн. (3.14)
Стала часу якірного кола:
![]() (3.15)
(3.15)
Момент інерції:
![]() (3.16)
(3.16)
Електромеханічна стала часу електроприводу:
 (3.17)
(3.17)
Розрахунок параметрів кола збудження
Опір кола збудження:
![]() (3.18)
(3.18)
Номінальний магнітний поток:
ФН=0.25 Вб.
Індуктивність обмотки збудження:
![]() (3.19)
(3.19)
де wз – кількість витків обмотки;
2∙р=14 – число полюсів;
ΔФ=ΔФН=0.25 Вб – номінальний магнітний поток, який визначаться за кривою намагнічування машини з довідника [1];
ΔIз=Ізн=179 А – номінальний струм збудження.
Номінальний магнітний поток розсіювання:
Фsн=0.6·(σ–1)Фн=0.6·(1.15–1)·0.25=0.0225 Вб. (3.20)
Індуктивність розсіювання:
![]() (3.21)
(3.21)
Стала часу обмотки збудження:
![]() (3.22)
(3.22)

Рисунок 3.1 –Структурна схема двозонної системи регулювання швидкості.
4 Синтез системи регулювання швидкості
Розрахунок і синтез контуру регулювання струму збудження.
С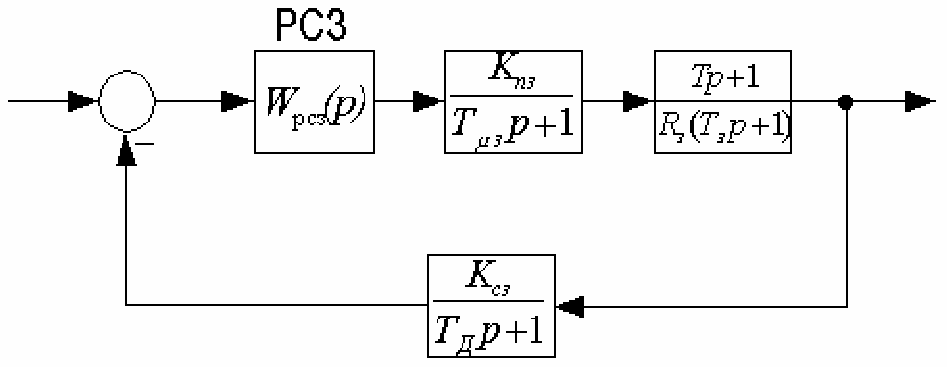 труктурна
сема регулювання КРСЗ наведена на
рисунку 3.3
труктурна
сема регулювання КРСЗ наведена на
рисунку 3.3
Рисунок 4.1 – Структурна схема контуру регулювання струму збудження.
З умови компенсації великих сталих часу приймаємо ПІ-регулятор струму збудження з передавальною функцією:
![]() (4.1)
(4.1)
Згідно з модульним оптимумом Тсз=2·Тμ2=2·0.003=0.006 с (Тμ2 – мала некомпенсована стала часу).
Максимальна ЕРС тиристорного збуджувача:
![]() (4.2)
(4.2)
Коефіцієнт підсилення тиристорного перетворювача у колі збудження:
![]() (4.3)
(4.3)
де Uкер – максимальна напруга керування СІФК.
Коефіцієнт зворотного зв’язку за струмом збудження
![]() (4.4)
(4.4)
де Uмах – максимальна вихідна напруга давача.
Отримаємо таку передавальну функцію замкненого контуру регулювання
струму збудження:
 (4.5)
(4.5)