

2.2 Устройство лабораторного стенда
Лабораторная работа выполняется на стенде №4 (рис.2.4).
В состав стенда входят:
Приборная панель.
Асинхронный двигатель с фазным ротором М1 и двигатель постоянного тока с независимым возбуждением М2 (в перспективе).
Электропривод на базе инвертора напряжения с широтно-импульсной модуляцией (производства украинско-итальянской фирмы «ЭПА», г. Киев).
Персональный компьютер Pentium III.
Коммутационная аппаратура.
Электропривод включает следующие функциональные блоки (рис.2.5):
Силовая часть, которая включает в себя входной фильтр, выпрямитель, звено постоянного тока с клампером для сброса энергии, получаемой от двигателя М1 при его работе в генераторных режимах, инвертор, а также датчики выходных токов инвертора и напряжения звена постоянного тока.
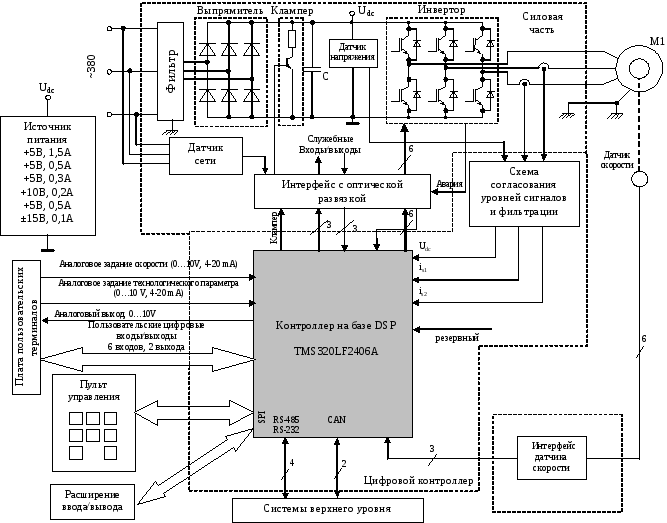
Рис.2.5. Функциональная схема асинхронного электропривода.
Управляющий контроллер, в задачи которого входит получение задания на отработку скорости/момента, расчет алгоритма векторного управления АД, расчет векторной ШИМ, выдача импульсов управления ключами инвертора, а также управление ключом клампера, опрос сигналов обратных связей по току и скорости, реализация всех защитных функций, а также общее управление всей системой.
Схемы согласования сигналов между управляющей и силовой частью, которые, кроме согласования уровней сигналов, должны обеспечивать гальваническую развязку силовых и управляющих цепей, что придает более высокую помехозащищенность системе управления, а также предотвращает выход со строя системы управления при аварийных ситуациях в силовой части.
Датчик сети, основное назначение которого – слежение за питающей сетью с целью заблаговременного выявления потенциально опасных режимов работы питающей сети, приводящих к аварии силовой части электропривода. К таким режимам, в частности, относятся превышение напряжения сети допустимого уровня, перекос фаз, пропадание одной из фаз, кратковременное пропадание напряжения, и др.
Интерфейс пользователя, к которому относятся: сигналы дискретного и аналогового ввода/вывода, пульт управления, обеспечивающий ввод параметров в систему, вывод информации о состоянии системы, значениях переменных, а также сигнализацию об ошибках, сбоях либо аварийных ситуациях в системе.
Источник питания асинхронного электропривода, к которому предъявляются высокие требования в части устойчивости работы при нарушении режимов работы питающей сети. С целью обеспечения указанного условия, целесообразно выполнять источник питания импульсного типа с питанием от звена постоянного тока. Тогда, в случае пропадания напряжения сети, благодаря запасенной энергии на емкости фильтра силового выпрямителя, системе управления будет достаточно времени для определения пропадания напряжения сети и вывода системы в безопасный режим с выключением силовых ключей инвертора или аварийного торможения.
В качестве исследуемого двигателя М1 используется двигатель АИР90L4У2, основные параметры которого приведены в табл.2.1. (В перспективе планируется состыковать М1 с нагрузочной машиной постоянного тока, управляемой от преобразователя БТУ).
В качестве датчика скорости в лабораторной установке используется импульсный датчик, выполненный в сочетании с устройство распознавания направления вращения. Разрешающая способность датчика скорости 2500 имп/об.
Преобразователь частоты выполнен по традиционной схеме трехзвенного ПЧ с транзисторным инвертором с ШИМ. Величина мертвого времени инвертора составляет 1,4 мкс.
Табл.2.1. Параметры АИР90L4У2.
|
Параметр |
Значение |
Параметр |
Значение |
|
Мощность |
2,2 кВт |
Индуктивность статора |
0,2800 Гн |
|
Номинальное линейное напряжение USel.H |
380 В |
Индуктивность ротора |
0,2800 Гн |
|
Номинальная частота вращения nH |
1410 об/мин |
Индуктивность намагничивающего контура |
0,2709 Гн |
|
Номинальная частота напряжения fS.H |
50 Гц |
Коэф. мощности КПД |
0,82 81,5% |
|
Сопротивление статора RS |
3,2 Ом |
Номинальный момент |
15 Нм |
|
Приведенное сопротивление ротора RR |
2,5 Ом |
Момент инерции двигателя |
0,007 кгм2 |
Управление преобразователем частоты осуществляется с помощи пульта управления, встроенного в стенд (рис.2.6), который предназначен также и для настройки параметров электропривода, отображения информации о текущем состоянии системы, значениях переменных. Вывод информации осуществляется с помощью пяти семи сегментных индикаторов. Ввод информации осуществляется с помощью восьми кнопок.
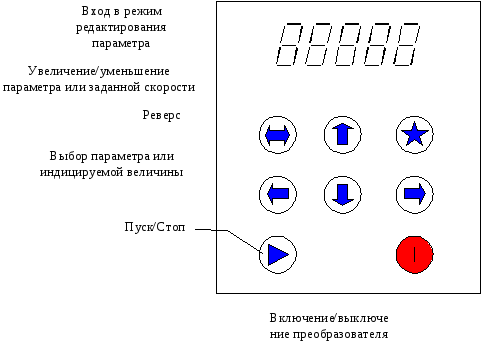
Рис.2.6. Расположение индикаторов и кнопок на пульте управления.
Клавиши «», «» предназначены для выбора параметра Р--хх в режиме настройки, а также для выбора индицируемой переменной в режиме работы инвертора. При индикации «P-OFF» клавиша «» осуществляет переход к параметру Р--01, а клавиша «» к параметру Р--125. Вход в режим изменения выбранного параметра осуществляется клавишей «*». Выход и режима редактирования параметра осуществляется клавишей «*». Клавиши «», «» служат для изменения величины редактируемого параметра.
Клавиша
![]() используется для пуска двигателя.
Клавиша
используется для пуска двигателя.
Клавиша![]() используются для включения/отключения
зарядного реле, а также для экстренного
выключения системы с переводом двигателя
в режим свободного выбега. Клавиша «»
приводит к реверсированию двигателя.
используются для включения/отключения
зарядного реле, а также для экстренного
выключения системы с переводом двигателя
в режим свободного выбега. Клавиша «»
приводит к реверсированию двигателя.
В режиме редактирования параметров кнопка реверса «» позволяет быстро выйти в начало меню (символ «P-OFF»).
Основные параметры, влияющие на работу преобразователя, сведены в табл.2.2.
При работе электропривода на индикаторе пульта управления отображается обозначение и значение одной из основных переменных, список которых приведен в табл.2.3. Такт квантования по времени составляет 200 мкс.
При возникновении одной из аварийных ситуаций, инвертор отключается, а на табло мигает код аварийной ситуации.
F—1 – превышен максимально допустимый ток.
F—2 – напряжение звена постоянного тока ниже допустимого
F—3 – напряжение звена постоянного тока выше допустимого
F—7 – сбой флэш-памяти
F—9 – сработала защита инвертора (сигнал с драйвера).
Сброс аварии осуществляется нажатием на пульте кнопки «*».
Для отображения динамических переходных процессов в электроприводе в стенде используется монитор персонального компьютера, к которому через последовательный порт СОМ1 подключен преобразователь частоты. По умолчанию скорость порта 57600 бит/с. Для визуализации процессов следует запустить программу Serial_RTDX (ярлык на рабочем столе). Программа позволяет осциллографировать изменение только двух переменных одновременно (см. табл.2.4 далее).
Внешний вид окна программы показан на рис.2.7.
Для начала работы с переменными необходимо установить переключатели (1) в положение Variable и Variable2.
ВНИМАНИЕ!!! Не считывайте информацию с контроллера при переключателях установленных в положения Fixed address и Fixed address2. Чтение некоторых адресов может привести к остановке выполнения программы контроллером и вызвать неконтролируемый режим работы системы.
В текстовой области Reading time (sec) указывается интервал времени для чтения данных (2). Может быть установлен в диапазоне от 0,1 с до 20 с.
Табл.2.2. Список параметров, подлежащих настройке.
|
Параметр |
Описание |
По умолч. |
|
P--1 |
Заданная частота
|
25 Гц |
|
P--2 |
Время разгона до номинальной частоты. |
1 с |
|
P--3 |
Время торможения с номинальной частоты. |
1с |
|
P--4 |
Запоминание последней рабочей скорости (0/1). |
0 |
|
P--5 |
Тип реверса (с остановкой или без – 1/0). |
0 |
|
P--6 |
Источник задания на скорость (0 – клавиатура, 1 – аналоговый вход). |
0 |
|
P--14 |
Напряжение включения клампера в звене постоянного тока. |
650 В |
|
P--15 |
Коэффициент пропорционального регулятора напряжения в звене постоянного тока. |
40 |
|
P--19 |
Включение алгоритма компенсации мертвого времени инвертора. (0 – выключен, 1 – включен) |
1 |
|
P--20 |
Параметр компенсации мертвого времени инвертора |
16 |
|
P--33 |
Частота ШИМ. (0 – 2,5 кГц, 1 – 5 кГц, 2 – 10 кГц) |
2 |
|
P --34 |
Алгоритм управления. 0 – частотное, 1 –улучшенное векторное, 2 – стандартное векторное управление |
0 |
|
P--35 |
Добавочный поток для частотного управления. Указывается в процентах от номинального потока. |
0 |
|
P--36 |
Время возбуждения. |
0,5 с |
|
P--51 |
Коэффициент пропорциональной части РТ. |
500 |
|
P--52 |
Коэффициент интегр. части РТ, умножаемый на 100. |
1250 |
|
P--53 |
Коэффициент пропорциональной части РС. |
100 |
|
P--54 |
Коэффициент интегральной части РС. |
5000 |
|
P--65 |
R1 – сопротивление статора |
3,2 Ом |
|
P--66 |
R2 – сопротивление ротора |
2,5 Ом |
|
P--67 |
L1 – индуктивность статора |
0,2800 Г |
|
P--68 |
L2 – индуктивность ротора |
0,2800 Г |
|
P--69 |
Lm– индуктивность намагничивающего контура |
0,2709 Г |
|
P--70 |
J- момент инерции |
0,007 кгм2 |
|
P--71 |
Коэффициент вязкого трения |
2,65 |
|
P--72 |
Номинальный поток двигателя |
0,96 Вб |
|
P--73 |
Номинальный ток двигателя |
5 А |
|
P--74 |
Номинальное напряжение двигателя (фазное) |
220 В |
|
P--75 |
Номинальная частота двигателя, Гц |
50 Гц |
|
P--76 |
Число пар полюсов |
2 |
|
P--78 |
Максимально допустимый мгновенный ток инвертора. |
15 А |
|
P--79 |
Уставка ограничения тока
|
10 А |
|
P --80 |
Минимально допустимое значение Udc |
200 В |
|
P --81 |
Максимально допустимое значение Udc. |
680 В |
|
P --86 |
Разрешающая способность датчика скорости |
2500 имп/об |
|
P –117 |
Отключение измерения напряжения звена постоянного тока. 0 – измерение включено (обязательно); 1 – режим первичного тестирования системы (все защиты и алгоритм управления клампером при этом не работают!) (Изменять запрещается!) |
0 |
Табл.2.3. Индицируемые переменные.
-
Символ
Переменная

Заданная скорость

Заданная частота

Действующий ток двигателя

Действующее напряжение двигателя

Потребляемая мощность

Напряжение звена постоянного тока

Измеренная скорость двигателя