

1_amp_amp_2nd_semestr
.pdfПуск в ход посредством переключения обмотки статора со звезді на треугольник.
Когда в нормальном режиме фазные обмотки в треугольнике, то уменьшение токов при пуске достигается включениями фазных обмоток статора звездой на период пуска с последующим их переключениями в треугольник для нормальной работы.
При соединении в звезду ток, потребляемый АД из сети IПСY IПY |
|
U1 |
||
|
|
ZЭК |
||
3 |
||||
|
|
|||
; U1 линейное напряжение сети;
При пуске АД с обмоткой статора . соединенной в треугольник:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 U1 |
, отсюда |
IПСY |
1 , т.е. при пуске АД с обмоткой, |
|
|
|
I |
|
|
3 I |
|
|
||||||
|
|
|
|
|
|||||||||
|
|
ПС |
|
|
П |
|
|
ZK |
IПС |
3 |
|||
|
|
|
|
|
|
|
|
|
|||||
соединенные Y из сети потребляется ток в 3 раза меньше, чем при пуске с . |
|||||||||||||
|
Но при этом и пусковой момент снижается в 3 раза, так как |
||||||||||||
|
mПY |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
IПY |
1 U |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||||
|
mП |
I П 2 |
3 |
AП |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||||
Недостаток – при пусковых переключениях цепь двигателя разрывается, что связано с возникновением коммутационных перенапряжений.
Пуск в ход АД с фазным ротором. АД с фазным ротором применяется:
1)если АД с к.з. ротором нельзя применить по условиям регулирования скорости вращения
2)в случае, если статический момент сопротивления на валу mСТ достаточно велик и поэтому АД с к.з. ротором с пуском при пониженном напряжении , а прямой пуск не возможен по условиям воздействия больших пусковых токов на сеть
11
3) если приводимые в движение маховые масс достаточно велики и выделяемая в роторной цепи АД тепловая энергия вызывает значительный перегрев обмотки ротора в виде беличьей клетки.
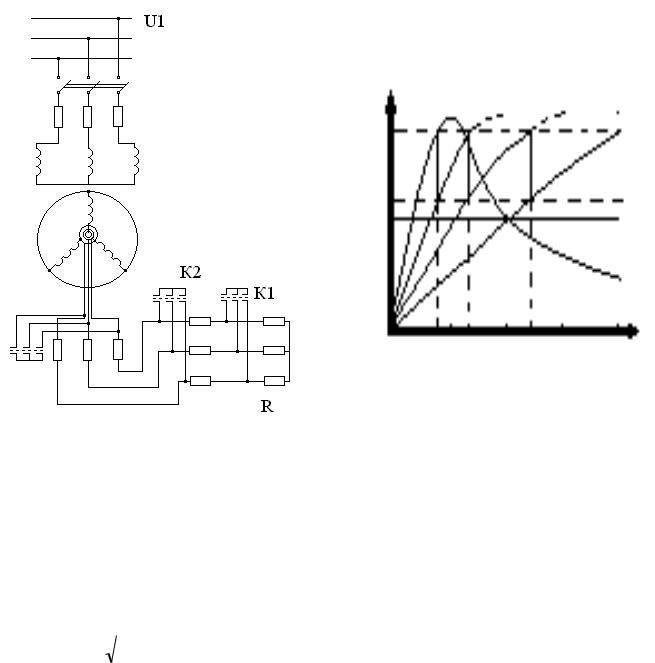
Пуск ДФР – с помощью пускового реостата в цепи ротора. Реостат по условиям нагрева рассчитывается на кратковременную работу. Металлические реостаты для охлаждения помещаются в бак с трансформаторным маслом. Они ступенчатые, переключаемые с одной ступени на вторую, либо вручную( рукоятки) , либо автоматически с помощью с помощью контакторов.
Жидкостный реостат – сосуд с электролитом, в который опущены электроды. Сопротивление реостата регулируется путем изменения глубины погружения электродов.
Рассмотрим пуск двигателя с фазным ротором.
Увеличение активного сопротивления ротора АД не изменяет по величине mmax , а смещает его на механическую характеристику mЭМ f(S) в сторону
больших скольжений. Поэтому, если желательно иметь mП mmax , то нужно, чтобы SКР соответствующего mmax равнялось 1.
Необходимая величина всего пускового сопротивления определяется из :
SКР |
|
|
С r' |
|
|
|
||
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
r 2 |
(X |
1 |
C X' |
)2 |
|
|||
|
|
|
||||||
1 |
|
1 |
Э |
|
|
|||
в котором вместо r2' нужно подставить rЭ' rД' , а SКР заменить на 1
12

|
|
|
С (r' |
r |
' ) |
|
|
||
1 |
|
|
1 |
|
2 |
Д |
|
|
|
|
|
|
|
|
|
|
|
|
|
r 2 |
(X |
1 |
C X' |
)2 |
|
||||
|
|
|
|||||||
1 |
|
|
1 |
Э |
|
|
|||
Механическая характеристика АД с ФР при отсутствии внешних сопротивлений в цепи машины – естественная механическая характеристика.
При пуске все щетки должны быть опущены на контактные кольца ротора, а все ступени реостата включены. В процессе пуска поочередно включаются контакторы К1,К2,К3. Можно выбрать интервалы времени переключения ступеней и сопротивления ступеней пускового реостата, так что момент АД при пуске m меняется от mmax до mmin . При включении в сеть mП mmax mC
На первом этапе АД работает |
характеристике № 1 , ротор движется с |
уменьшением скольжения и при |
S = S2 и m mмин происходит переключение |
реостата на вторую ступень. При работе АД на характеристике 2 и дальнейшем разбеге АД S уменьшается от S S1 до S S2 , а момент от m mmax до
m mmin . Потом производится переключение на первую ступень.
Далее, после отключения последней ступени реостата АД переходит на работу по естественной характеристике 0.
Если у АД есть короткозамыкающий механизм, после окончания пуска щетки с его помощью поднимаются с контактных колец и кольца замыкаются накоротко, а реостат возвращается в пусковое положение , т.е. пусковая аппаратура приводится в готовность к следующему пуску.
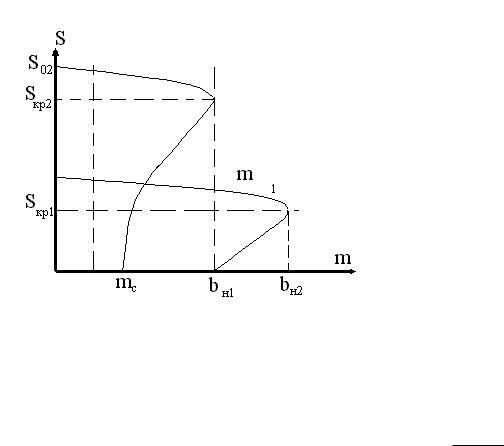
Ступенчатый пуск асинхронного двигателя. Ступенчатый пуск двухскоростных и многоскоростных двигателей. Осуществляется так, чтобы вначале получить наибольшее число полюсов.
Потом по достижении двигателем установившейся угловой скорости, которая соответствует этому числу полюсов, его обмотки переключаются на меньшее число полюсов.
Двигатель при этом вновь ускоряется, разгоняясь до большей угловой скорости. На рис. показана механическая характеристика двухскоростного АД.
В начале Д соответственно характеристике, отвечающей числу пар полюсов 2р разгоняется до угловой скорости 1(S1) при моменте сопротивления mC . После
этого происходит переключение на число пар полюсов р с начальным моментом m1 двигатель разгоняется до угловой скорости 2 (S2 ).
Кривая изменения скольжения S(t) при ступенчатом пуске может быть
построена по уравнению: t |
П1 |
|
Tj |
(1 S2 |
S |
КР |
ln |
1 |
) |
для первой ступени |
||
|
|
|||||||||||
|
|
|
|
2bН1 |
2SКР |
|
|
S |
|
|||
|
|
|
|
|
|
|
|
|
||||
скольжения изменяется от 1 до 0,05. |
|
|
|
|
|
|
||||||
Tj Tj1 |
J C1 |
SКР SКР1 |
|
|
|
|
|
|
||||
mН1 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
13
Расчет кривой скольжения S(t) для второй ступени производится по тойже формуле.
t |
|
|
Tj |
( |
0,5 S2 |
S |
|
ln |
0,5 |
) |
|
П2 |
2bН2 |
2SКР |
КР |
S |
|||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
С начальным скольжением 0,5 и конечным 0,05 , Tj Tj2 J C2 mН2
SКР SКР2
Полное время пуска при ступенчатом пуске : tПС tП1 tП2
Полное время пуска равно сумме времен разгона на первой и второй ступенях. Для данного рассматриваемого случая время ступенчатого пуска окажется меньше чем время разгона в одну ступень до этой же угловой скорости. Аналогично строят кривую S ( ) (t) при другом числе полюсов.
7
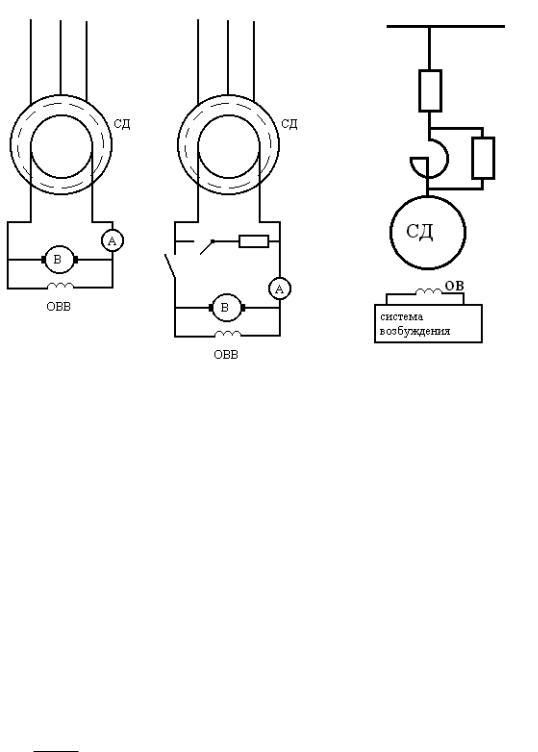
Пуск синхронных двигателей.
Основной способ синхронизации СД – асинхронный пуск. Асинхронный пуск СД происходит под влиянием полного эл. магн. Момента равного сумме моментов асинхронных режимов (без if ) и моментов, обусловленных возбуждением
конструкции. Современные СД приспособлены к асинхронному пуску.
Во всех практических случаях процесс пуска СД разбивается на два этапа: на первом этапе СД разгоняется до подсинхронной скорости в основном под действием среднего асинхронного момента, возникающего после включения СД в сеть. Подсинхронная частота вращения составляющей примерно S=0,05 и менее.
Второй этап – синхронизация СД под действием момента, обусловленного возбуждением и реактивного момента ( Xd Xq ). Для улучшения пусковых
характеристик СД на роторе кроме ОВ размещают пусковую обмотку ( демпферная обмотка). Активное сопротивление чтобы пусковой момент mП при
S=1 достаточно должно быть большим. При S=1 частота токов в двигателе большая, следовательно вытеснение и rП обмотки большое и mПСД большой, СД
может пускаться при полном напряжении сети и пониженном через
14
дополнительное устройство (реактор или АТ). Пониженное напряжение при больших пусковых токах СД при S=1 ( IП 4 6 )
На первой стадии пуска ОВ СД замыкается либо на част. сопротивление, равное RrАА (10 12) rf либо наглухо к возбудителю. Оставлять ОВ разомкнутой в
процессе пуска нельзя, т.к. при S=1 на ОВ появляются значительные Э.Д.С., что может привести к пробою изоляции. При пуске контакты 1 разомкнуты, а 8 замкнуты. В конце асинхронного пуска при S=0,05 срабатывает частотное реле и включает контактор цепи возбуждения. Контакты 1 при этом замыкаются, а 2 разомкнуты и на ОВ подается возбуждение.
Во всех случаях при вращении ротора СД со скольжением относительно поля статора в ОВ наводится Э.Д.С. частоты скольжения равно f1 S f2
При замкнутой ОВ протекает ток I частоты f1S1 создает пульсирующие поле той
же частоты. Это неподвижное относительно ОВ поле может быть разложено на два поля: одно вращается в сторону ротора, другое – против вращения ротора. Первое поле имеет относительно статора скорость:
nПР n (n n1) n1, т.е. вращается синхронно с полем статора. Второе поле имеет относительно обмотки статора скорость:
nОБ n (n1 n) 2n n1 2n1(1 S) n1 n1(1 2S)
S n1 n n1
Это поле создает в статорной обмотке ток, который имеет частоту: fОБ pnОБ pn1(1 2S) f1(1 2S)
Причем при S 0,5 fОБ 0
Прямое поле движется относительно ротора в сторону вращения и взаимодействуя с полем статора, обусловленным токами частоты f1 образует эл.
15
магнитный момент ma (S) , который в диапазоне 0 S 1 является
двигательным.
В результате взаимодействия токов обмотки статора частота f1 (1 S) с обратным М.П. образуется дополнительный асинхронный момент mад(S)
При скорости ротора n n21 , в роторной обмотке индуктируется ток частоты f2 f21 и S 0,5 и обратно синхронновращающееся поле будет вращаться
относительно статора в сторону противоположную вращению ротора. Если n n1
2
, то f2 f21 , S 0,5 и обратно синхронновращающееся поле будет вращаться в сторону ротора и основного вращающегося поля.
При n мало отличающегося от n1 в обеих случаях будет возникать достаточно
2
заметный асинхронный дополнительный момент mад(S). При n n21 , S 0,5 этот
момент увлекает СД в направлении вращения ротора – двигательный момент, во втором – действует против направления вращения – тормозной момент. Величина момента ma (S) в области S 0,5 также сильно уменьшается,
вследствие того, что обратное поле ОВ не заглушается дополнительными токами
16

статора, вследствие чего результирующее индуктивное сопротивление ОВ при S 0,5 велико и токи в ней уменьшаются.
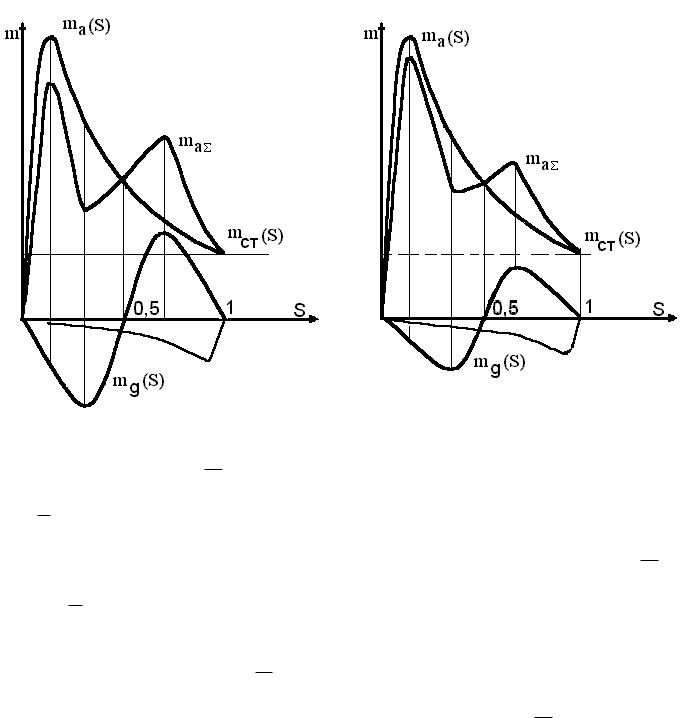
На рисунке представлены ma (S),mад(S),ma (S) . Без пусковой обмотки даже при
пуске без нагрузки СД не смог бы скорость большую, чем половина синхронной. На рис. а) кривые для случая наличия ПО и замыкании ОВ накоротко. При большом статическом тормозящем моменте на валу mСТ , СД не может развивать
скорость большую, чем половина синхронной. Но разомкнуть ОВ нельзя – большие Э.Д.С.
Поэтому при пуске СД со значительными нагрузками (mCT 0,35mн ) - замыкают
на время пуска на добавочное сопротивление.
Если в цепи ОВ добавочное сопротивление, то уменьшается i и уменьшается влияние момента ОВ (Rдоб 10rf ). На рис. б) кривые для для этого случая.
Момент ma (S) на участке n n1 выше момента сопротивления на валу mСТ и
2
СД может благополучно разгонятся до скорости близкой к синхронной. Пуск СД с глухоподключенным возбудителем является простым. Однако
включение ОВ на малое сопротивление якоря возбудителя увеличивает провал в асинхронной характеристике, а преждевременное возбуждение СД ( самовозбуждается при n (60 70)nНОМ ) приводит к уменьшению среднего
электромагнитного момента, т.к. от взаимодействия М.П. возбуждается и вызванная им в статоре тока частота f1(1 S) возникает электромагнитный
момент тормозного характера mаКЗ ( момент короткозамкнутой обмотки статора).
Зависимость такая же как у нормальной асинхронной машины.
Реактивный момент не оказывает существенного влияния на процесс разгона, возникают лишь дополнительные колебания момента СД относительно среднего значения.
При подсинхронной скорости ОВ СД подключают к возбудителю (при пуске СД с подключенным возбудителем СД возбужден при большом скольжении) и происходит процесс синхронизации.
Основную роль на этом этапе пуска играет синхронный момент. Так как существует скольжение, то изменяется непрерывно и mC ( ) носит
знакопеременный характер. При 0 синхронный момент направлен в сторону вращения ротора и вместе с ma (S) вызывает уменьшение S ротора.
Если S становится достаточно малым, то в очередной период ускоряющего действия mC ротор достигает синхронной скорости вращения и после нескольких
колебаний входит в синхронизм.
В случаях, если момент сопротивления машины мал СД может втянуться в синхронизм лишь под действием реактивного момента.
Чтобы проверить вхождение в СД синхронизм необходимо решить уравнение
движения эл. привода |
Tj |
d2 m mC |
|
0 |
|||
|
dt2 |
17

Это сложная задача. На практике для приближенной оценки успешности синхронизации применяют критерии, основанные на определении критического скольжения, установившегося асинхронного хода без возбуждения, при котором возможно вхождение в синхронизм:
S |
|
0,06 |
|
mmax x |
|
Ifп |
|
|
|
|
|
||||||
КР |
|
|
Tj |
Ifн |
||||
|
|
|
|
|||||
Ifп |
- ток возбуждения в конце пуска; Ifн - номинальный ток возбуждения |
|||||||
mmax x - максимальный электромагнитный момент с учетом фактической форсировки возбуждения. Если скольжение SУ СД, определяемое точкой пересечения кривых среднего асинхронного момента ma (S) и момента сопротивления равно или меньше SКР то втягивание в синхронизм обеспечено.
8
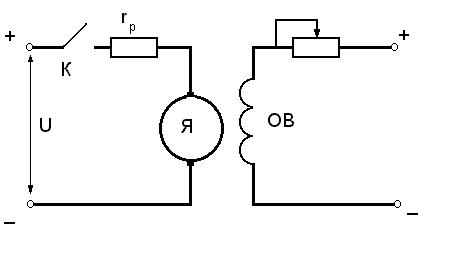
Пуск двигателя постоянного тока независимого параллельного возбуждения.
Режим пуска двигателя в ход характеризуется следующими данными:
1)кратностями току якоряIU  IN
IN
2)кратностями электромагнитного момента mэм  mэмп
mэмп
3)временем пуска tп
4)экономичностью способу пуска Пуск двигателя постоянного тока может быть осуществлен путем:
а) прямого включения в сеть; б) включения на сеть через пусковое сопротивление (реостатный пуск)
в) пуск при пониженном напряжении в цепи коря
БЕЗРЕОСТАТНЫЙ ПУСК – самый простой : цепь якоря неподвижного двигателя включается в сеть сUа .Одновременно с этим, или заранее для двигателя с
независимым и параллельным возбуждением подается напряжение на цепь возбуждения .Ток в цепи якоря Ia и поток двигателя ψδ образуют
электромагнитный моментm под влиянием которого якорь приходит во
эм
вращение с большим ускорением.
При ω=0 ,так же и Еа=0 в момент включения ток якоря Ia Ua  Ra .
Ra .
Если Ua Uan , то при Ra =0,015 0,1, ток якоря: Ia (60 10) Iaн . При прямом пуске может:
1)на коллекторе может возникнуть ускорение (довольно сильное).
2)Ускоряется работа защитной и измерительной аппаратуры.
3)большие токи якоря при пуске, следовательно большая посадка U сети
a
18
4) вызвать механический удар (большие токи) рабочего механизма вследствие
резкого увеличения m (при соизмеримых маховых моментах двигателя и
эм
рабочего механизма).
Поэтому безреостатный пуск применим для двигателя малой мощности (до 6 кВт) при всплесках ток превышающих номинальным в (6 8 ) раз, а процесс пуска длится не более 1 2 сек.
Поэтому самый распространенный пуск – пуск с помощью пускового реостата.
Пуск двигателя постоянного тока независимого возбуждения до основной угловой скорости.
Рассмотрим пуск ДПТ НВ в одну ступень:
Процесс пуска двигателя независимого возбуждения при замыкании в цепи якоря выключателя К. В этой схеме постоянно включен резистор общего сопротивления якорной Ra ra rp цепи:
При исследовании процессов пуска принимается: А) напряжение сети U const
Б)двигатель предварительно возбужден В) реакция якоря не изменяет const
Г) mC const Д) La 0
Уравнение механического и электрического равновесия:
U Ia Ra Ea Ia Ra CM |
(3) |
U Ia Ra CM
Но Ia - действующее (постоянное значение)
Если в мгновенных величинах при U const :
U ia Ra CM (1) mЭМ CM ia g(t) ia
19
mЭМ g(t) ia
Из (2) ia
J d m |
C |
(2) |
|||||
|
dt |
|
|
|
|||
|
|
|
|
|
|
||
J |
|
|
d |
|
mC |
|
|
g |
dt |
g |
|
||||
|
|
|
|
|
|||
U R |
|
( J |
|
d |
|
|
mc |
) g |
||||||
a |
|
|
|
|
|
|
||||||||
|
|
|
g |
|
dt |
|
|
|
g |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||
U |
|
JRa |
|
d |
|
|
mC Ra |
|
||||||
g |
g2 |
|
dt |
|
|
g2 |
||||||||
|
|
|
|
|
|
|
|
|
||||||
0 TM d C dt
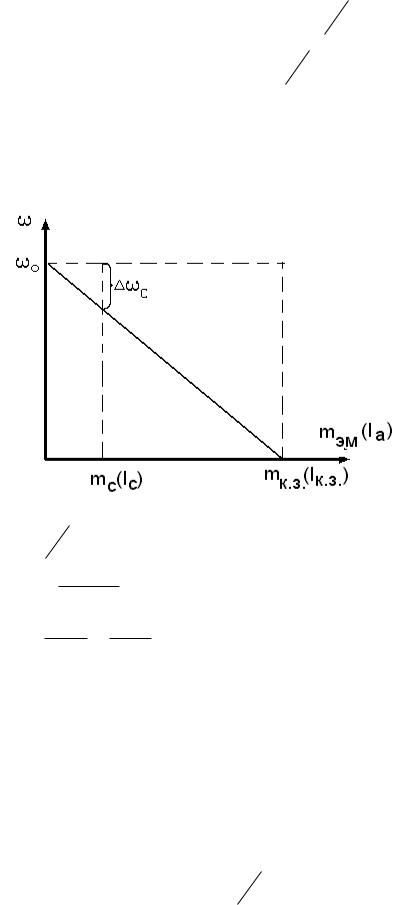
Пусковая механическая характеристики ДПТ НВ
0 Ug - угловая скорость двигателя при идеальном Х.Х.
C mC Ra - перепад угловой скорости при нагрузке моментом mC g2
TM J Ra J 0 - электромеханическая постоянная времени – время в течении g2 mК.З
которого привод с моментом инерции J разгоняется без нагрузки из неподвижного состояния до 0 при неизменном моменте, равном m .Постоянно зависит от
mК.З.
Если Ra повышается, то mК.З. уменьшается и соответственно TM повышается. TM не зависит от нагрузки.
Запишем (2) в виде:
|
d |
|
|
( 0 |
C ) / TM |
|||
|
dt |
TM |
||||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
t |
|
|
x |
|
b |
xСВ Сe |
TM |
||
|
|
|
||||||
x |
|
TM |
|
|
||||
|
|
|
|
|
|
|
|
|
20