

1_amp_amp_2nd_semestr
.pdfxВАН 0 С
|
|
|
t |
|
|
|
|
|
|
|
|
Сe TM |
(3) |
|
0 |
С |
|
|
|
для t=0 нач
Снач ( 0 С ) нач С
Вобщем виде уравнения для угловой скорости двигателя при пуске:
t
С ( нач С ) e TM
C - установившаяся угловой скорости двигателя при моменте нагрузки mC . При пуске двигателя из неподвижного состояния под нагрузкой ( нач 0 ):
t
С (1 e TM )
При пуске без нагрузки до установившейся угловой скорости 0 :
t
0 (1 e TM )
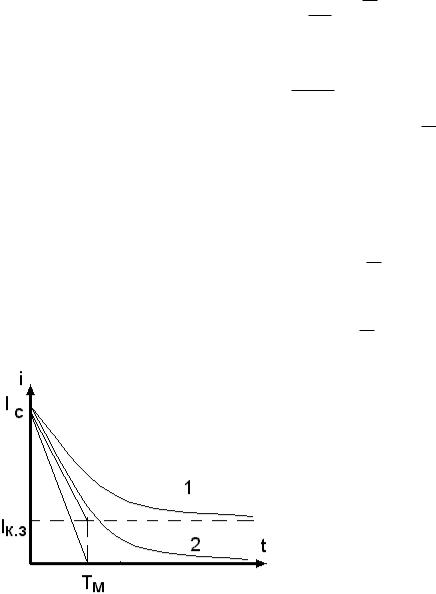
На рис. кривые f(t) при пуске двигателя ПТНВ под нагрузкой (кр.1) и без нагрузки (кр.2)
На рис. кривая f(t) при пуске ДПТ. Согласно уравнениям для процесс пуска теоретически заканчивается за бесконечно большое t . Практически можно считать, что процесс пуска заканчивается при tп (3 4)TM ,т.к. в этом случае отличается от установленного значения не более чем на 5 24. Для t 3TM
угловая скорость привода отличается от установленного значения не более чем на 5 % и можно считать , что неустан процесс к этому t заканчивается .
Если бы пуск двигателя совершался с неизменным моментом равным mК.З. , то
угловая скорость двигателя во времени изменялась бы только по прямой оа , а при пуске без нагрузки и о при пуске с нагрузкой. Отрезки 0и и С равны TM .
Зависимость тока в цепи якоря при пуске двигателя определяется :
21
i J d IC ; g dt
Но из (3)
I |
mC |
- ток нагрузки. |
||||||
|
|
|||||||
C |
|
g |
|
|
|
|||
|
|
|
|
|
||||
d |
|
|
C |
e |
t |
|||
|
TM |
|
||||||
|
||||||||
dt |
|
|
|
T |
|
|
|
|
|
|
|
|
M |
|
|
|
|
i J C g TM
Для начальных условий про t =0; i Iнач
С g TM
J
t
e TM IC
(Iнач IC )
t
Или: i IC (Iнач IC ) e TM
Начальное значение тока определяется в общем виде:
Iнач (U Ea ) / Ra
Если пуск из неподвижного состояния, Ea 0 ; и Iнач Iк.з. U / Ra ; Ток в якоре при этом выражается зависимостью:
t
i (Iк.з. IC ) e TM IC
При пуске без нагрузки, когда IC 0
t
i Iк.з. e TM
Можно заключить, что если механич. характеристика двигателя линейна и mC const то f(t) и i f1(t) - экспоненты.
1)Пуск под нагрузкой
2)Пуск вхолостую
Многоступенчатый реостатный пуск двигателя постоянного тока.
Для уменьшения брака тока при пуске двигателя в цепь якоря двигателя включают пусковой реостат. Для пуска ДТП применяются практически только металлические реостаты – с воздушным и масляным охлаждением, с ручным и автоматическим,и полуавтоматическим управлением.
22
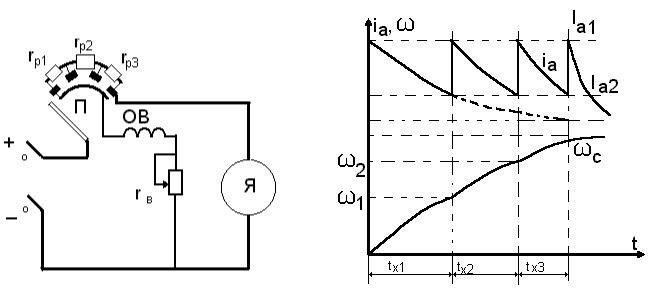
Рассмотрим процесс реостатного пуска на примере параллельного возбуждения: ПР имеет секционированное сопротивление, причем величина сопротивления в цепи якоря меняется в зависимости от числа включенных секций реостата. Реостат имеет несколько контактов: первый является холостым . последний – рабочим . При ручном управлении пусковым реостатом перемещением рукоятки Р меняем сопротивление в цепи якоря . Рукоятка Р имеет электрический контакт с пластиной П, соединенной с ОВД, что обеспечивает подачу напряжения на ОВД при любом рабочем положении Р, а при снятии напряжения с двигателя путем перевода рукоятки на холостой контакт дает возможность энергии МП , запасенной в ОВ выделится в ПР, что исключает возникновение перенапряжения. При многоступенчатом пуске обычно задаются определенными границами колебаний пускового тока или пускового момента.
Процесс пуска двигателя постоянного тока изображен на рисунке.
Во время пуска ОВ находится постоянно под полным напряжением и iв и
постоянны и максимальны при пуске.
При положении рукоятки в первом положении (t=0) цепь якоря оказывается включенной на полное сопротивление rP . При этом возникают токи ia ,iв и так же
mЭМ .
Во время пуска ОВ находится постоянно под полным напряжением и iв и
постоянны и максимальны при пуске.
При положении рукоятки в первом положении (t=0) цепь якоря оказывается включенной на полное сопротивление rP . При этом возникают токи ia ,iв и так же
mЭМ .
Если mЭМ mC то из
Ток в t=0 достигает максимального значения Ia1 . При этом в якоре будет индицироваться ЭДС Ea CM . С увеличением Е ток якоря
Ia уменьшается. С уменьшением Ia уменьшается mЭМ СМ . С уменьшением mЭМ нарастание замедляется . Чтобы не увеличивать время
23

пуска tП по достижении током некоторого минимального значения Ia2 при скорости 1 , ток якоря увеличивают переводя рукоятку Р на следующий контакт
. исключая часть сопротивления rP .
Сопротивление (которое исключают) собирается так, чтобы при выключении Ia стал равным Ia1 .
После выключения пускового реостата двигатель разгоняется до установившейся скорости C , а ток якоря Ia стремится к установившемуся значению,
определяемому: |
IaC |
mC |
|
CM |
|||
|
|
Найдем время t x в течении которого ток двигателя меняется от Ia1 до Ia2 . Воспользуемся уравнением:
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
i |
a |
I |
(I |
I |
) e TM |
(*) |
|
|
aC |
анач |
аС |
|
|
|
|
t x - время разбега двигателя на рассматриваемой ступени,
TMX - электромеханическая постоянная времени для той же ступени.
Постоянная t для каждой ступени резистора соответствует суммарному сопротивлению цепи якоря. Из (*) находим время разбега
t |
|
T |
ln |
Ia1 |
IaC |
x |
|
IaC |
|||
|
MX |
Ia2 |
|||
|
|
|
|||
По мере выведения реостата сопротивление цепи якоря Ra уменьшается и TЭМ
уменьшается , что приводит к уменьшению времени разбега на каждой последующей ступени : t X1 t X2 t X3
Обычно при пуске Ia1 (1,5 1,7)Ian , Ia2 (0,2 1,2)Ian
9
Пуск асинхронных электродвигателей.
Пуск асинхронных двигателей, как правило, сопровождается при нормальном напряжении существенным увеличением тока, перенапряжением между витками обмоток статора, а также увеличением электродинамических сил между частями установки и снижением напряжения на шинах установки. Пуск асинхронных двигателей с коротко замкнутым ротором производится путем подачи к обмотке статора полного или пониженного напряжения. Прямой пуск асинхронных двигателей на полное напряжение наиболее желательно, так как не требуется никаких дополнительных устройств в виде реактора или автотрансформатора, а схема пуска проста, кроме того минимальное время разворота асинхронного двигателя и минимальное выделение тепла в обмотках за время пуска. асинхронный двигатель с короткозамкнутым ротором выполнены из расчѐта на прямой пуск – и он применяется когда пусковые токи не вызывают недопустимых понижений напряжения на шинах электроустановки. В противном случае приходится использовать пусковые реакторы или автотрансформаторы
24

(используется переключение, на время пуска, обмоток статора из треугольника в звезду).
Асинхронный двигатель с фазным ротором пускают в ход путем подключения обмоток статора на полное напряжение, но в устройство ротора предварительно вводится дополнительное активное сопротивление – пусковой реостат. При этом пусковой ток уменьшается.
Экспериментально установлено, что электромагнитные и переходные процессы не оказывают существенного влияния на процесс пуска асинхронного двигателя, так как время их протекания мало по сравнению с временем пуска. По этому анализ процесса пуска асинхронного двигателя можно свести к исследованию только механического переходного процесса, то есть к решению уравнения движения. Это означает, что можно использовать статический электромагнитный момент асинхронного двигателя, определяющийся алгебраическим уравнением.
При пуске на вал системы асинхронный двигатель – механизм действует избыточный момент, который определяется уравнением движения:
m m m |
J d |
|
g |
c |
пр dt |
Приведенный момент инерции Jпр равен сумме моментов инерции двигателя Jдв и приведенного к валу двигателя момента инерции механизма:
|
|
|
|
|
|
2 |
J |
J |
|
J |
|
мех.н |
. |
дв |
|
|||||
пр |
|
мех.пр |
|
|
||
|
|
|
|
|
ном.д |
|
В относительных единицах уравнение движения можно записать:
m |
g |
|
J |
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
J |
|
|
|
|||
|
|
|
пр |
с |
|
d |
; |
m |
g |
T |
|
|
; |
где |
|
T |
пр |
|
с |
. |
|||||
mн |
mн |
|
dt |
|
|
|
j dt |
|
|
|
|
j |
mн |
|
|
||||||||||
Но для асинхронного двигателя: |
|
1 S ; |
|
или |
|
1 S . |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
Тогда уравнение движения асинхронного двигателя имеет вид: |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
T dS |
|
|
|
|
|||||
|
|
|
|
|
T |
|
|
m |
g |
, или |
m |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
j |
|
dt |
|
|
|
|
|
g |
j |
dt |
|
|
|
|
||||||
Tj (c) – механическая постоянная времени агрегата.
S2
Время перехода от одной частоты вращения к другой: t Tj dS , если mg*=1,
S1 mg*
S1=1 (двигатель остановлен); S2=0 (соответствует синхронной скорости вращения), то: t Tj (0 1) Tj .
Постоянная времени Tj равна времени за которое машинный агрегат, под действием постоянного mg, равного номинальному моменту mн электродвигателя, разгоняется из неподвижного состояния до синхронной частоты вращения.
Ранее было получено выражение для Тj:
T |
|
G D2 c н |
; |
T |
G D2 c н |
. |
|
|
|
||||||
j |
|
4 g 1000 Pн |
j |
3.57 |
104 P |
||
|
|
|
|||||
|
|
|
|
|
|
н |
|
Эта величина полностью характеризует инерционные свойства системы двигатель
– механизм. Дело в том, что момент инерции J сам по себе ничего не говорит об
25
изменении угловой скорости агрегата при переходных процессах. Агрегат, имеющий весьма большой момент инерции, но работающий с относительно небольшой угловой скоростью, может обладать временем ускорения (Tj) меньшим, чем агрегат с небольшим J, но работающий с относительно небольшой угловой скоростью. Чтобы определить время разгона и торможения асинхронного двигателя, необходимо знать зависимости вращающего момента m и момента сопротивления mс от скольжения S. Для большего количества двигателей решать эту систему уравнений решать сложно.
Особенно просто это уравнение решается аналитически, когда для m(S) используется формула Клосса, а mc=const. В частном случае, когда двигатель не нагружен и потери на трение в подшипниках малы, mc=0, и уравнение движения имеет вид:
|
2bн |
|
|
|
T |
dS ; |
dt T ( |
S |
|
S'кр |
)dS; |
|||
|
|
|
|
|
|
|||||||||
|
|
|
S' |
|
|
S |
|
|
||||||
|
S |
|
кр |
|
j |
dt |
j |
кр |
|
S' |
||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sкр |
|
|
S' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
S |
S |
|
S' |
|
|
T |
|
|
время разгона: |
t |
|
j |
|
( |
|
|
кр |
)dS |
j |
||||
|
2b |
|
|
|
|
2b |
|
|||||||
|
|
|
|
н 1 |
S |
кр |
S' |
н |
||||||
|
|
|
|
|
|
|
|
|
|
|||||
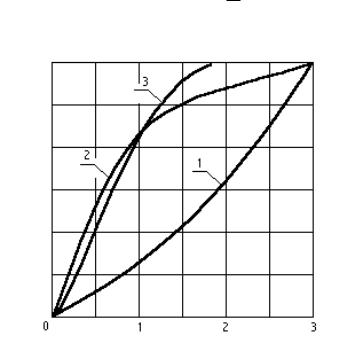
Из этого выражения можно найти |
|
|
||||||||||||
S(t), |
n(t), |
(t) |
|
при |
|
пуске |
|
|
||||||
электродвигателя. |
На |
|
|
рисунке |
|
|
||||||||
представлены кривые S(t) при Tj=2c, |
|
|
||||||||||||
bн=2, для разных Sкр: 1- Sкр=0,1; |
|
|
|
|
|
|||||||||
2- Sкр=0,3; 3- Sкр=1. |
|
|
|
|
|
|
|
|
|
|
|
|
||
Из выражения для t видно, что |
|
|
||||||||||||
полное |
время |
разгона, |
|
|
до |
|
|
|||||||
синхронной частоты (S=0) велико. Пуск считается завершенным, если S устанавливается не более 0,05. В этом случае полное время пуска:
(1 S'2 Sкр ln 1) . 2Sкр S
t |
п |
|
Tj |
(1 0.052 S |
кр |
ln |
1 |
) |
Tj |
( |
1 |
3S |
кр |
) . |
|
|
|
|
|||||||||||
|
|
2bн |
2Sкр |
|
0.05 |
|
2bн |
2Sкр |
|
|||||
|
|
|
|
|
|
|
|
|||||||
tп – зависит от Sкр. Минимальное время пуска получается при Sкр=0,407.
10
Выбег электродвигателей
Выбег двигателей системы двигатель – механизм – это процесс уменьшения его частоты вращения, вызванный отключением электродвигателя от сети, или же резким снижением подведенного напряжения. Одиночный выбег это такой выбег,
26
при котором один электродвигатель оказался отсоединенным от сети и от других двигателей, или же такой, при котором, другие двигатели, электрически связанные с ним, не оказывают существенного влияния на процесс выбега. Как правило это происходит если между рассматриваемым и другими двигателями включен реактор или трансформатор. Выбег одного двигателя, отключенного от сети, называют свободным. Если взаимное влияние отсоединенных от источника питания двигателей велико, такой выбег называют групповым.
Одиночный выбег асинхронного и синхронного двигателей
Будем рассматривать простейший случай выбега одиночного агрегата двигательмеханизм при отключении двигателя от сети и определении характеристик механизма по кривым выбега (t). При отключении двигателя то сети на вал агрегата действует избыточный момент равный моменту сопротивления: mg mc Tj dSdt ;
mg* - динамический или избыточный момент; m – электромагнитный момент равен 0.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S2 |
|
|
|
|
|
|
|
|
|
|
S2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|||||
Время изменения скольжения от S1 до S2: t |
|
|
T |
|
|
dS |
; |
|
|
t |
|
|
|
dS |
. |
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
|
|
|
g |
|
|
|
|
|
|
|
|
g |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S1 |
|
|
|
|
|
|
|
S1 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Момент сопротивления агрегата: |
|
m |
c |
m |
g |
m |
стр |
(к |
з |
|
m |
стр |
|
) |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
d |
|
|
|
2 |
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Заменив dS на d : t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
mc |
|
mстр |
(кз mстр ) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
; где =2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
кз mстр |
mстр (кз mстр ) 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для случая выбега 1= 1ном, 2= решив уравнение, получим. |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
кз mстр |
|
|
|
|
|
|
|
|
|
|
|
|
кз mстр |
|
|
|
|||||||||||||||||
t |
|
|
|
|
|
|
|
|
|
|
|
|
arctg |
|
|
arctg |
|
. |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
m |
|
(к |
|
|
m |
|
) |
|
|
|
|
|
mстр |
|
|
|
ном |
|
|
|
|
|
|
|
|
|
|
|
|
mстр |
|
|
|
|
|
|||||||||||
|
|
|
|
стр |
з |
стр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
27
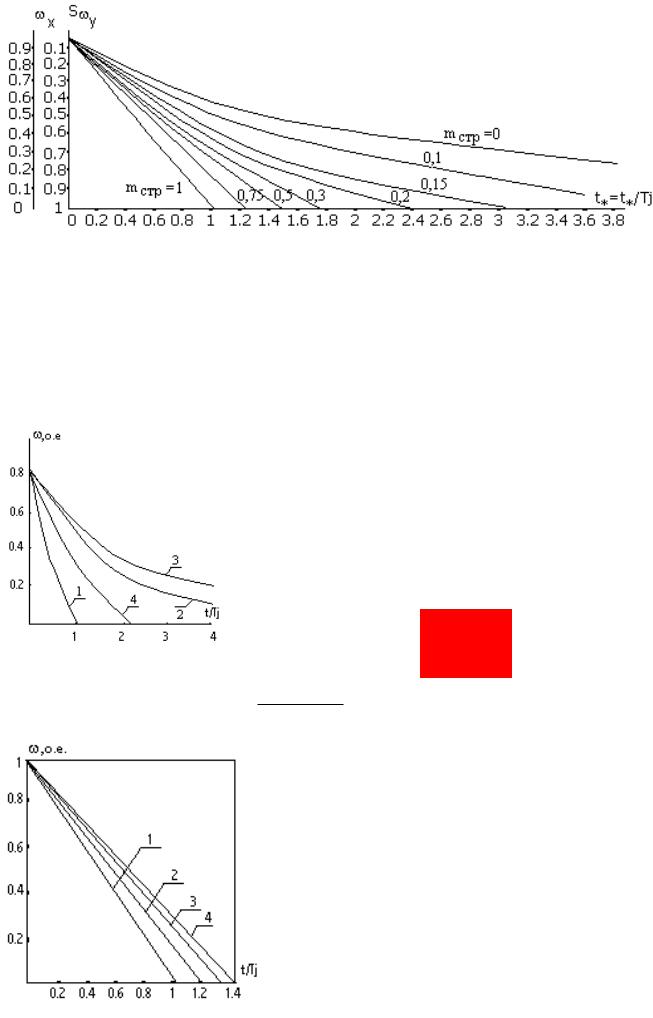
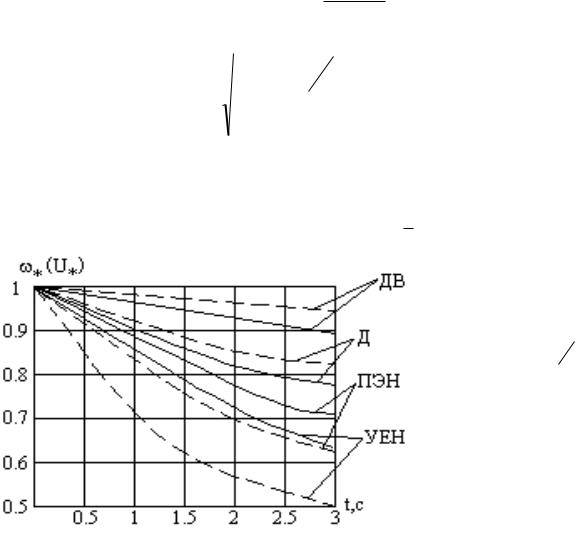
На рисунке построены кривые зависимости относительно времени выбега агрегата t* с механизмом, имеющий вентиляторный момент сопротивления mс от
* при различных значениях mстр*.
Анализ графиков показывает: в начальной стадии процесса изменение угловой скорости происходит одинаковым образом не зависимо от момента сопротивления, то есть выбег агрегатов имеющих одинаковые Tj и работающих с одинаковыми Кз до отключения будет происходить в своей начальной части практически одинаково.
Или: t' |
y Tj |
|
y Tj |
(mg )t 0 |
(mc )t 0 |
Имея кривую выбега можно судить о характере момента сопротивления. При постоянном mc характеристика имеет форму прямой (1- =0). Если mc уменьшается при уменьшении (кривые 2, 3, 4) то с выбег будет происходить медленнее. Постоянная агрегата механизм-двигатель определяется по касательной к начальной части кривой выбега (при t=0, и = у). Отрезок, отсекаемый этой кривой в начальной точке на оси
абсцисс будет равен: t' |
|
y |
. |
|
|
|
|||
|
|
|
||
( |
|
)t 0 |
|
|
t |
|
|||
(1 Sy ) Tj ; то есть примерно равен отношению Tj
(mc )t 0
к моменту сопротивления, с которым асинхронный двигатель работал перед отключением. Коэффициент загрузки двигателя существенно влияет на выбег агрегата.
=0; 1-кз=1; 2-кз=0,9; 3-кз=0,8; 4-кз=0,7
То есть выбег одиночного агрегата двигатель-механизм полностью определяется Tj, зависимости mc*( *) и Кз.
28
ЭДС асинхронного двигателя при свободном выбеге Из схемы замещения асинхронного двигателя и векторной диаграммы следует,
что ЭДС асинхронного двигателя меньше напряжения сети. Следовательно, при внезапном отключении от сети, когда ток в статоре мгновенно исчезает напряжение на выводах двигателя уменьшается от Uc=U1 до Еg=E2’’.
I' 'ад UcZ Eg
Д
Величина Е’2 от S и ее действующее значение можно определить по формуле:
E'2 |
|
|
|
(r'2 |
S |
)2 |
(x' |
2 |
)2 |
|
|
|
. |
|||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
U1 |
|
|
(r c |
|
|
r'2 |
)2 (x |
1 |
c |
|
x' |
2 |
)2 |
|
|
|||
|
|
|
|
|||||||||||||||
|
1 |
1 |
|
S |
|
|
|
|
|
1 |
|
|
|
|
||||
Многочисленными экспериментами установлено, что в момент отключения от сети U на выводах двигателя снижается от номинального, принятого равным 1о.е., до 0.85-0.95. В дальнейшем ЭДС двигателя развиваемая свободно выбегающим
двигателем затухает с постоянной времени Tасд
За счет запасенной электромагнитной энергии магнитный поток снижается по экспоненциальному
закону Ф Ф е t Tасд Остаточное напряжение на выводах статора затухает пропорционально произведению Фб
Uост Ф
Наибольшее время выбега при индивидуальной остановке имеют дымососы,
дутьевые вентиляторы и резервные возбудители.
11
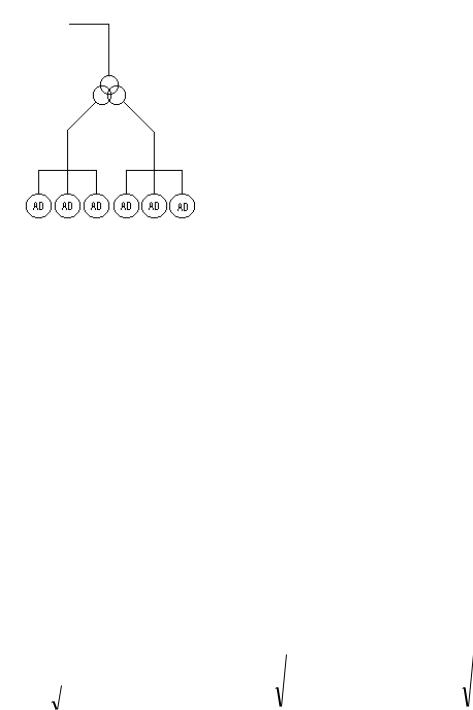
Групповой выбег
При одновременном отключении нескольких двигателей, которые связаны друг с другом через общие шины, отключившейся от сети. Физические процессы при выбеге зависят от причины нарушения питания. Этот процесс происходит по разному при коротком замыкании на сборных шинах и при отключении рабочего трансформатора собственных нужд от сборных шин среднего напряжения. Выбег также происходит иначе, чем выбег одиночных двигателей.
29
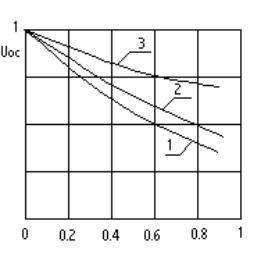
После отключения источника питания за счет запасенной кинетической и электромагнитной энергии двигателя на шинах генерируется напряжение, уменьшающееся за счет затухания индуктивных токов в обмотке ротора и уменьшения угловой скорости . Это напряжение обуславливает взаимную связь между двигателями.
Поскольку механические характеристики двигателя и механизмов не идентичны, предшествующая нагрузка двигателя также не одинакова и по другим причинам ЭДС отдельных двигателей не равна по величине и по фазе. Вследствие этого между двигателями циркулируют уравнительные токи, создающие в них вращающие моменты и происходит обмен энергии, то есть в процессе выбега происходит взаимное влияние двигателей друг на друга. Величина уравнительных токов при групповом выбеге в нескольких двигателях достигает значений, сравнимых со значениями токов при самозапуске к примеру для двигателей ДВ со значительным запасом кинематической энергии и являющимся при выбеге АС генераторами циркулируют токи примерно (2-3)Iном.
Наиболее существенное влияние на процесс группового выбега оказывают механические характеристики двигателей и механизмов. Часть двигателей, которые имеют большие механические постоянные времени, отдавая энергию двигателям, которые имеют меньшие механические постоянные времени. Последние работают в двигательном режиме. Вследствие обмена энергией двигатели, работающие в генераторном режиме уменьшают частоту вращения быстрее, а двигатели работающие в двигательном режиме – медленнее, чем при индивидуальном выбеге. Двигатели вентиляторов при групповом выбеге работают в генераторном режиме, а насосов в двигательном.
Частота остаточного напряжения меняется почти по прямолинейному закону со скоростью примерно (4-7)Гц/сек. Частота вращения всех двигателей уменьшается пропорционально изменению частоты напряжения. Поскольку по мере уменьшения скорости группы агрегатов уменьшается и частота тока генерируемого двигателями, их вращающие моменты изменяются не пропорционально квадрату напряжения общего напряжения, а в меньшей степени.
Скорость, с которой уменьшается остаточное напряжение при групповом выбеге, зависит от
суммарной мощности электродвигателей, их нагрузки и других факторов. Скорость снижения U существенно больше скорости снижения частоты. Поэтому, к моменту, когда напряжение практически полностью затухает, (2-3)сек, величина снижения частоты составляет примерно (10-25)%. Снижение
напряжения на шинах приводит к снижению уравновешивающего тока и к уменьшению взаимного влияния двигателей. Если остаточное напряжение незначительно, то взаимное влияние прекращается и двигатели выбегают независимо друг от друга. Если в результате короткого замыкания в сети
30