

Принцип Даламбера для механической системы
Геометрическая
сумма главных
векторов внешних сил, действующих на
систему, и сил инерции всех точек
системы, а также геометрическая сумма
главных моментов этих сил относительно
некоторого центра для несвободной
механической системы в любой момент
времени равны нулю, т. е.
 ;
;
Главный вектор и главный момент сил инерции твердого тела
Главный вектор и главный момент сил инерции точек системы определяются отдельно для каждого твердого тела, входящего в данную механическую систему. Их определение основывается на известном из статики методе Пуансо о приведении произвольной системы сил к заданному центру.
На
основании этого метода силы инерции
всех точек тела в общем случае его
движения можно привести к центру масс
и заменить их главным вектором
 *
и главным моментом
*
и главным моментом относительно
центра масс. Они определяются по формулам
относительно
центра масс. Они определяются по формулам
 т.
е. при любом движении
твердого тела главный вектор сил инерции
равен со знаком минус произведению
массы тела на ускорение
т.
е. при любом движении
твердого тела главный вектор сил инерции
равен со знаком минус произведению
массы тела на ускорение
 центра
масс тела;
центра
масс тела; ,гдеrkc
— радиус-вектор
k-й
точки,
проведенный из центра масс. Эти формулы
в частных случаях движения твердого
тела имеют вид:
,гдеrkc
— радиус-вектор
k-й
точки,
проведенный из центра масс. Эти формулы
в частных случаях движения твердого
тела имеют вид:
1.
Поступательное
движение.

2. Вращение тела вокруг оси, проходящей через центр масс
 ,
,

3.
Плоскопараллельное
движение 


Введение в аналитическую механику Основные понятия аналитической механики
Аналитическая механика - область (раздел) механики, в котором изучается движение или равновесие механических систем с помощью общих, единых аналитических методов, применяемых для любых механических систем.
Рассмотрим наиболее характерные понятия аналитической механики.
1. Связи и их классификация.
Связи — любые ограничения в виде тел или каких-либо кинематических условий, накладываемые на движения точек механической системы. Эти ограничения могут быть записаны в виде уравнений или неравенств.
Геометрические связи — связи, уравнения которых содержат только координаты точек, т. е. ограничения накладываются только на координаты точек. Это связи в виде тел, поверхностей, линий и т. п.
Дифференциальные связи — связи, накладывающие ограничения не только на координаты точек, но и на их скорости.
Голономные связи — все геометрические связи и те дифференциальные, уравнения которых могут быть проинтегрированы.
Неголономные связи — дифференциальные неинтегрируемые связи.
Стационарные связи — связи, в уравнения которых не входит явно время.
Нестационарные связи — связи, изменяющиеся с течением времени, т. е. в уравнения которых явно входит время.
Двусторонние (удерживающие) связи — связи, ограничивающие движение точки в двух противоположных направлениях. Такие связи описываются уравнениями.
Односторонние (неудерживающие) связи - связи, ограничивающие движение только в одном направлении. Такие связи описываются неравенствами
2. Возможные (виртуальные) и действительные перемещения.
Возможными или виртуальными перемещениями точек механической системы называются воображаемые бесконечно малые перемещения, которые допускают наложенные на систему связи.
Возможным перемещением механической системы называется совокупность одновременных возможных перемещений точек системы, совместимых со связями. Пусть механическая система — кривошипно-шатунный механизм .
Возможным
перемещением точки А
является
перемещение
 которое в силу его малости считается
прямолинейным и направленным
перпендикулярно кОА.
которое в силу его малости считается
прямолинейным и направленным
перпендикулярно кОА.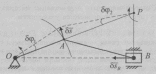
Возможным
перемещением точки В
(ползуна)
является перемещение
 в направляющих. Возможным перемещением
кривошипаОА
является
поворот на угол
в направляющих. Возможным перемещением
кривошипаОА
является
поворот на угол
 ,
а шатунаАВ
— на
угол
,
а шатунаАВ
— на
угол
 вокруг МЦС (точкаР).
вокруг МЦС (точкаР).
Действительными перемещениями точек системы называются также элементарные перемещения, которые допускают наложенные связи, но с учетом начальных условий движения и действующих на систему сил.
Число степеней свободы S механической системы - это число ее независимых возможных перемещений, которые можно сообщить точкам системы в фиксированный момент времени.
Принцип возможных перемещений (принцип Лагранжа)
Принцип возможных перемещений или принцип Лагранжа выражает условие равновесия несвободной механической системы, находящейся под действием приложенных активных сил. Формулировка принципа.
Для
равновесия несвободной
механической системы с двусторонними,
стационарными, голономными и идеальными
связями, находящейся в покое под действием
приложенных активных сил, необходимо
и достаточно, чтобы сумма элементарных
работ всех активных сил равнялась пулю
на любом возможном перемещении
системы из рассматриваемого положения
равновесия:
