

7.2.3 Применение электродвигателей
Использование электродвигателей в модулях подвижности манипуляторов представляет предпочтительным по ряду причин. Электрические двигатели весьма разнообразны, относительно дешевы, имеют высокий к.п.д., широко распространены в технике, разработано много методов эффектного управления ими. Источники электроэнергии имеются совместно, в то время как для пневмо – и гидропривода следует иметь автономные источники и устройства для подготовки энергоносителя к использованию в работах.
Желательно, чтобы источник энергии был один и тот же как для силовой, так и для управляющей систем робота,- в этом отношении электропривод является наиболее подходящим. Электродвигатель не создает проблем с загрязнением среды, он удобен в эксплуатации, так как является “сухим ” и бесшумным.
Для применения в промышленных роботах с установкой двигателей на звеньях электродвигатель должен иметь удельную мощность порядка 150 вт/кг – по этому показателю он уступает гидродвигателю, удельная мощность которого в среднем в 10 раз выше.
Применение электропривода будет расширяться по мере создания и развития новых типов двигателей, специально предназначенных для роботов.
В состав электропривода модуля подвижности входит электрический двигатель, снабженный датчиками обратной связи по положению и скорости, Механическая передача, тормоз, электромагнитная муфта, устройство управления.
Применение электропривода в роботах имеет свои особенности. Во-первых, для них характерна работа в условиях сильно изменяющейся по мере изменения конфигурации манипулятора нагрузки. Это предъявляет повышенные требования к жесткости статической характеристики. Во- вторых – значительное изменение ( в десятки раз) приведенного момента инерции, что также вызвано изменением конфигурации, это отражается на динамических характеристиках (быстродействии и динамической точности). Третьей особенностью электропривода является требования не колебательного характера отработки перемещений.
7.2.4 Типы двигателей
В робототехнике могут быть использованы любые типы двигателей, но в настоящее время преимущественное распространение получили два типа: двигатели постоянного тока а шаговые двигатели. Асинхронные двигатели плохо функционируют в условиях работы с переменным скоростями и реверсированием движения; они не получили широкого распространения из-за сложности и высокой стоимости электронных преобразователей, обеспечивающих регулирование частоты вращения. Хотя синхронные двигатели в робототехнике до последнего времени применялись редко, они могли бы заменить двигатели постоянного тока, так как их рабочие характеристики близки к характеристикам двигателей постоянного тока. Шаговые электродвигатели обладают широкими возможностями для их применения в роботах, однако они маломощные.
Двигатели постоянного тока работают на номинальных частотах вращения 2000-3000 мин-1. Они обладают существенными достоинствами: их движущие моменты практически не зависят от положения робота и скорости вращения, а зависят только от токов в обмотках возбуждения и в якоре. Если обмотки возбуждения заменить постоянными магнитами, то скорость вращения будет зависеть только от напряжения питания. В робототехнике используются двигатели постоянного потока с постоянными магнитами. Возможны различные исполнения – классические двигатели с якорем из магнитного материала, двигатели с полым ротором, дисковые двигатели с печатным якорем .
В промышленных роботах применяются электроприводы как дискретного, так и непрерывного действия. В роботах с позиционным управлением, включая цикловое управление по упорам, применяются электроприводы дискретного действия. В простейшем случае управление электродвигателей может быть релейным. В системах контурного управления требуется непрерывное управление перемещением и скоростью привода.
Наряду с двигателями непрерывного действия находят применения шаговые двигатели, которые обеспечивают позиционирование с точностью до шага в единицу времени. Вследствие малости шага такие приводы по точности практически эквивалентны приводам непрерывного действия.
Приводные электродвигатели роботов обычно выполняются высокооборотными – только при таких условиях удается достичь требуемой мощности при приемлемой массе двигателя. С другой стороны, для привода звеньев робота требуется низкая скорость и большой крутящий момент, поэтому редуктор необходим. Считается, что оптимальное сочетание быстроходности и массы двигателя достигается при частоте вращения порядка 10000 мин-1 . Учитывая, что рабочая скорость звеньев большинства промышленных роботов находится в пределах 10-20 мин-1 (для вращающих звеньев), потребуется уменьшение скорости двигателя в 500-1000 раз.
?.3.1 Основные проблемы конструирования модулей подвижности
Одна из основных проблем при конструировании механических систем роботов состоит в создании передаточных механизмов с высокой жесткостью. В этом отношении оправдано применение силового модуля, схема которого представлена на рисунке.
Такие модули, как уже отмечалось, используются в роботах шведской фирмы АСЕА западногерманской фирмы КУКА, а также находят применение в ряде японских роботов последних модификаций.
На рисунке 42 указано: 1 – высокоскоростной электродвигатель, 2 – волновая или планетарная передача, 3 – прецизионная передача винт-гайка качения, 4 – ведомое коромысло.
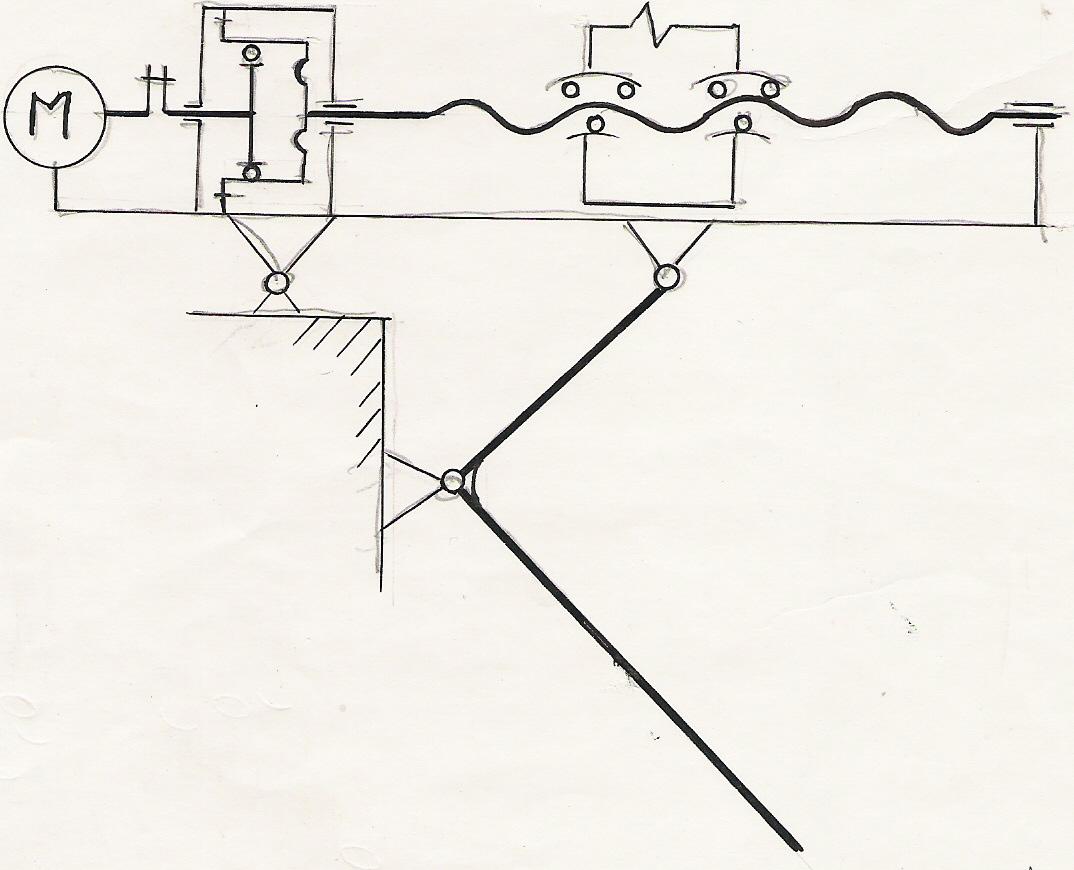
Рисунок 42- Приводной модуль промышленного робота на основе шарико-винтовой передачи
При высокой податливости первой ступени механизм имеет большую общую жесткость благодаря высокой жесткости прецизионной шарико-винтовой передачи; такие передачи характеризуются повышенной плавностью, жесткость с = 107-108 н/м, к.п.д. η =0,9-0,98 .