

Борисенко / Конспект лекций / Лекция 5
.docЛЕКЦИЯ 5
5 СХЕМЫ И КОНСТРУКЦИИ МЕХАНИЗМОВ ОРИЕНТАЦИИ РАБОЧЕГО ОРГАНА МАНИПУЛЯТОРА
5.1 Кинематическая цепь, реализующая локальные движения , называется кистью робота, поскольку она выполняет функции, аналогичные кисти руки человека. Назначение кисти – выполнение ориентирующих движений.
Из курса теоретической механики известно, что произвольную ориентацию твердому телу можно задать путем трех последовательных плоских поворотов, производимых относительно несовпадающих осей, связанных с телом . Механической моделью , осуществляющей физическую реализацию таких движений , служит так называемый «карданов подвес» (рисунок 30).
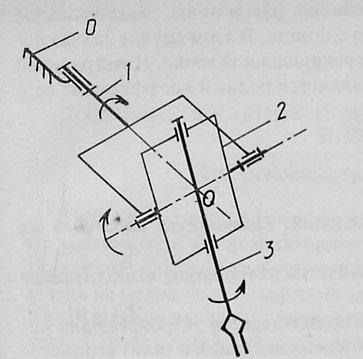
Рисунок 30- Карданов подвес
Карданов подвес представляет трехзвенную кинематическую цепь с одними вращательными парами, причем оси всех пар пересекаются в одной точке, в таком случае движение твердого тела жестко связанного с последним звеном, будет сферическим с центром в точке пересечения осей поворотов. Это движение является композицией трех движений: прецессии (движения звена 1 по отношению к звену 0), нутации или качания (движение звена 2 по отношению к звену 1), чистого вращения или ротации ( движение звена 3 по отношению к звену 2). Если все оси взаимноперпендикулярны, то соответствующие углы принято называть углами Эйлера. (Заметим, что взаимноперпендикулярность осей не является обязательным требованием для сферического движения и поэтому существуют механизмы ориентации в которых оси поворотов звеньев не перпендикулярны).
5.2 Манипуляторы с электроприводом , размещенным на основании , имеют сложные схемы передачи движения . Во многих случаях они представляют системы дифференциальных и планетарных механизмов с коническими и цилиндрическими зубчатыми колесами, соединенными коаксиальными трансмиссионными валами. Дифференциальные механизмы используются практически во всех механизмах передачи движения на кисть робота. Установим основные особенности кинематического расчета таких передач.
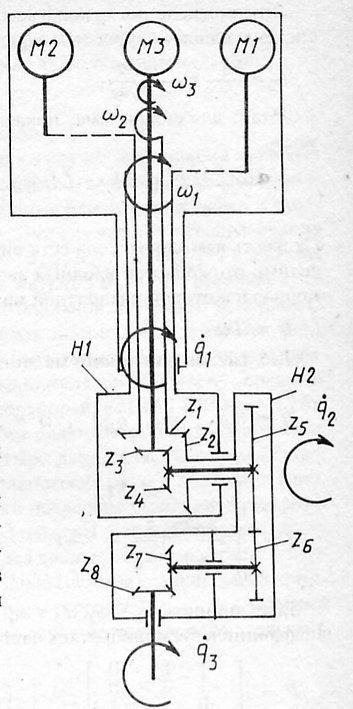
Рисунок 31 – Механизм ориентации кисти
с коническими дифференциалами![]()
Допустим, что рассматривается дифференциальный механизм с тремя входами и одним выходом. Угол поворота выходного вала представляет некоторую функцию углов поворотов входных валов φ1,φ2, φ3:
![]() .
.
Угловая скорость на выходе найдется дифференцироваием этого выражения по времени:
![]()
или
![]() ,
,
где k1 , k2 , k3 -частные производные от функции.
Для определения , например, k1 можно рассмотреть частный случай, когда
![]() .
Тогда , очевидно,
.
Тогда , очевидно,
![]() .
.
Аналогичным образом выражаются и остальные частные производные. Таким образом , коэффициенты k1, k2, k3 представляют передаточные отношения от выходного вала к входному в механизме , в котом остальные входные валы неподвижны. Будем называть их передаточными коэффициентами. Степень подвижности таких частных механизмов равна единице. По структуре это либо замкнутые дифференциальные механизмы, либо планетарные механизмы, либо рядовые передачи, Расчет таких механизмов производится известными методами.
В механизмах привода кисти робота из-за габаритных ограничений разместить двигатели непосредственно в кинематических парах невозможно. На рисунке 31 представлена схема привода механизма ориентации с проводкой движения от двигателей М1, М2, М3 , расположенных на предплечьи манипулятора , механизм обеспечивает движение по трем эйлеровым углам.
Угловые скорости коаксиальных валов обозначим ω1, ω2,ω3 , скорости относительных вращений в шарнирах кисти
![]() ,
,
![]() ,
,
![]() . Установим связь между этими скоростями.
Очевидно , что
. Установим связь между этими скоростями.
Очевидно , что
![]() =
ω1.
=
ω1.
Для определения
![]() рассмотрим соответствующий двухстепенной
дифференциал , включающий водило H1
и шестерни 1 и 2 (рисунок 32)
рассмотрим соответствующий двухстепенной
дифференциал , включающий водило H1
и шестерни 1 и 2 (рисунок 32)
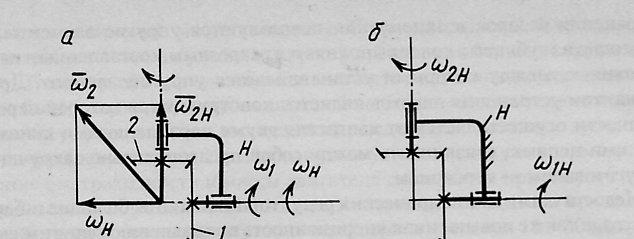
Рисунок 32 – Двухколесный конический дифференциал (а) и его обращенная схема (б)
Для обращенного рядового механизма справедливо выражение
ω1H / ω2H = Z2 / Z1 ,
где ω1H = ω1 – ωH .
Применительно к схеме на рисунке 31 ω2H
=
![]() , а ωH
= ω2 . Отсюда следует
, а ωH
= ω2 . Отсюда следует
![]() = (ω1 – ω2)
Z1 / Z2
.
= (ω1 – ω2)
Z1 / Z2
.
Для определения
![]() следует рассмотреть трехстепенной
дифференциал с тремя входами M1,
M2, M3
. Для этого механизма
следует рассмотреть трехстепенной
дифференциал с тремя входами M1,
M2, M3
. Для этого механизма
![]() = k1ω1
+ k2ω2
+ k3ω3
.
= k1ω1
+ k2ω2
+ k3ω3
.
Чтобы найти k1 , рассмотрим механизм, полученный из исходного дифференциала при ω2 = 0, ω3 = 0. Это комбинированная схема , в состав которой входят два коаксиальных планетарных механизма с коническими колесами ( один образован шестернями 1 и2 и водилом H1, второй – шестернями 3 и 4 и водилом Н1 )и дитфференциальный механизм с цилиндрическими колесами (водило H2 и шестерни 5 и 6). Проведя вычисления аналогично приведенным выше получим соответствующее выражение, которое для сокращения записи здесь не приводиться (его можно найти в книге Л.А.Борисенко, А.В.Самойленко. Механика промышленных роботов и манипуляторов с электроприводом).
Для определения k2 предполагаем, что ω1 = ω3 = 0. В этом случае приведенный дифференциал можно рассматривать как двухступенчатый механизм, первая ступень которого содержит рядовую коническую передачу 1-2, а вторая – планетарный механизм, состоящий из водила H2, неподвижного колеса 5 и сателлита 6.Выполнив соответствующий расчет получим выражение для коэффициента k2.
Для определения k3 полагаем, что ω1 = 0, ω2 = 0. Тогда приведенная схема превращается в систему рядовых зубчатых передач, для которой несложно найти выражения для передаточного отношения через числа зубьев колес.
Скорость выходного вала есть линейная форма с постоянными коэффициентами от скоростей входных звеньев. Эту связь удобно представить с помощью некоторой квадратной матрицы U с оставленной из определенных выше передаточных коэффициентов:
![]()
где
![]() - [
- [![]() ]т
,
]т
,
![]() т
т
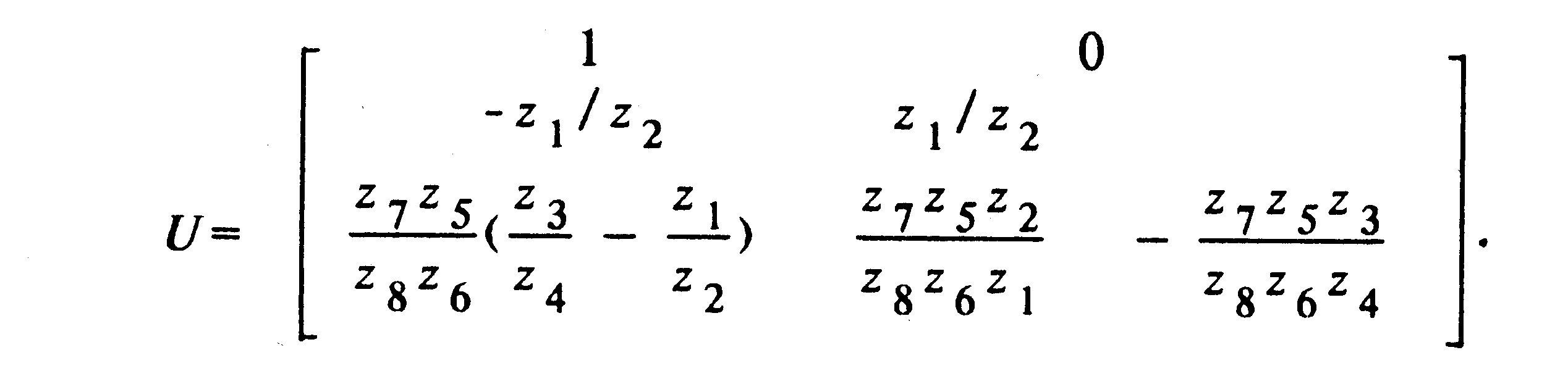
Если принять Z1= Z2 , Z3 = Z4 , Z5= Z6, Z7 = Z8 , матрица передаточных коэффициентов приобретает частный вид:
U =

![]() ,
,
т.е.
![]()
![]() =
ω1 ,
=
ω1 ,
![]() =
- ω1+ ω2
,
=
- ω1+ ω2
,
![]() .
.
Используя матричное уравнение можно найти скорости двигателей, обеспечивающих заданное сферическое движение кисти :
![]() .
.
5.3 На рисунке 32 представлена схема привода кисти ,осуществляющей два ориентационных движения, качание и ротацию, снабженный дополнительным устройством для развязки движений.
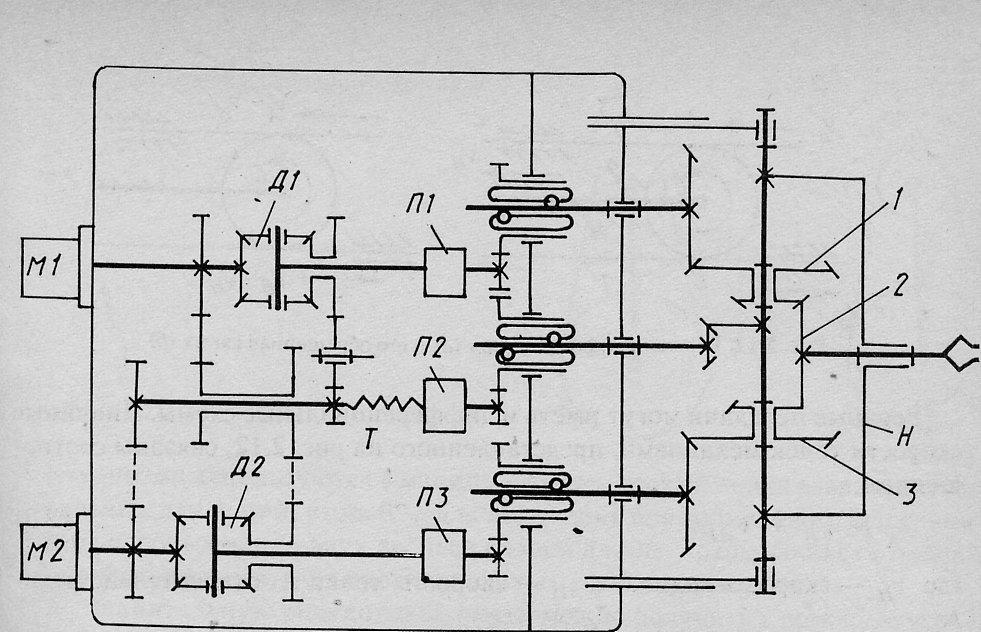
Рисунок 33 – Привод кисти промышленного робота «Универсаал-15»
Привод осуществляется от двигателей М1 и М2 через планетарные механизмы П1,П2, П3. Движение передается посредством шестигранных валов, перемещающихся по шариковым направляющим в продольном направлении при раздвижке телескопической руки
Качание кисти производится двигателем М2. Для того чтобы при этом не происходила ротация кисти, центральные конические колеса 1 и 3 должны иметь скорости ω1=ω3 =ωH. Эти движения обеспечиваются дополнительными кинематическими цепями, включающими взаимосвязанные трехколесные симметричные дифференциалы Д1 и Д2.
Характерной особенностью всех схем передачи движения посредством зубчатых колес является постоянство матрицы передаточных коэффициентов, ее независимость от конфигурации манипулятора, вторая особенность – кинематическая взаимосвязь движений отдельных звеньев, что усложняет управление манипулятором и является существенным недостатком таких схем. Если приводы разместить непосредственно в кинематических парах, то
движение звенев будет кинематически развязано.
.
Рисунок 34 Механизм ориентации с неортогональными осями