

Момент инерции
При исследовании движений системы недостаточно знать ее массу и положение центра масс, необходимо определять и другие характеристики распределения масс.
Движение тел существенным образом зависит от величины и характера распределенияя масс. Так, например, величина массы тела непосредственно характеризует инертность при поступательном его движении. При вращательном движении мерой инертности тела явл. его момент инертности относительно оси вращения, определяющей характер распределения масс.
Моментом инерции механической системы (тела) относительно точки 0 (полярным моментом инерции) называется сумма произведений масс всех точек системы на квадрат их расстояния до точки 0 :


 (1)
(1)
Моментом инерции системы (тела) относительно оси (x, y, z) называется скалярная величина, равная сумме произведений масс всех точек системы (тела) на квадраты их расстояний до этой оси.

 (2)
(2)

Момент инерции системы ( тела) относительно плоскости

 (3)
(3)

Из (1) и (2)




Момент инерции тела относительно оси можно представить в виде произведения массы тела на квадрат радиуса инерции тела относительно этой оси:

Радиус инерции равен расстоянию от оси до той точки, в которой надо мысленно сосредоточить массу всего тела, чтобы момент инерции одной этой точки был равен моменту инерции всего тела.
Теорема Гюйгенса.
Теорема.Момент инерции тела относительно данной оси равен моменту инерции его относительно параллельной оси, проходящей через центр масс тела, сложенному с произведением массы тела на квадрат расстояния между этими осями


Докозательство
 (1)
(1)
 (2)
(2)
из
∆.

Подставляем
 в
(2) и получаем
в
(2) и получаем

 т.к.
т.к.
 из
из

 (т.к. ось zпроходит через центр масс)
(т.к. ось zпроходит через центр масс)
Следовательно

Теорема доказана
Определение моментов инерццц некоторых однородных тел
Тонкий однородный стержень

Дано: l,M.
Определить Yz,Yz1.
Для элементарного
отрезка длинны dx, h
= x, а масса ,
,


Тонкое круглое однородное кольцо радиусом Rи массойM

Дано: M,R.
Определить Yz


Круглый однородный диск
Выделем элементарное кольцо
радиусом rиdr. Площадь этого
кольца 2πdr, а масса

 - масса единицы
площади пластины.
- масса единицы
площади пластины.
Тогда для элементарного кольца

для всей пластины получим

|
Program metlevtr; Var a,b,h,int,s:real; Var I,n:integer; Function funct(z:real):real; Begin Funct:=z*z; End; Begin Read(a,b,n); H:=(b-a)/n; S:=0; For I:=0 to n-1 do S:= s + funct(a+i*h); Int:=s*h; Weriteln(int:5:2); End.
Program metpravtr; Var a,b,h,int,s:real; Var I,n:integer; Function funct(z:real):real; Begin Funct:=z*z; End; Begin Read(a,b,n); H:=(b-a)/n; S:=0; For I:=1 to n do S:= s + funct(a+i*h); Int:=s*h; Weriteln(int:5:2); End.
Program centr; Var a,b,h,int,s:real; Var I,n:integer; Function funct(z:real):real; Begin Funct:=z*z; End; Begin Read(a,b,n); H:=(b-a)/n; S:=0; For I:=0 to n-1 do S:= s + funct(a+i*h+h/2); Int:=s*h; Weriteln(int:5:2); End.
|
Program mettrap; Var a,b,h,int,s:real; Var I,n:integer; Function funct(z:real):real; Begin Funct:=z*z; End; Begin Read(a,b,n); H:=(b-a)/n; S:=(funct(a)+funct(b))/2; For I:=1 to n-1 do S:= s + funct(a+i*h); Int:=s*h; Weriteln(int:5:2); End.
Program metsimps; Var a,b,h,int,s:real; Var I,n,k:integer; Function funct(z:real):real; Begin Funct:=z*z; End; Begin Read(a,b,n); H:=(b-a)/n; S:=(funct(a)+funct(b)) K:=1; For I:=1 to n-1 do begin S:= s + funct(a+i*h)*(3+k); K:=-k; End; Int:=(s*h)/3; Weriteln(int:5:2); End.
|
Ι. Рассмотрим равновесие каждого тела последовательно
1. Tело № 4

Изобразим все заданные силы приложенные к телу 4.
Заданные силы:
cила тяжести (m4g), сила натяжения нити (T43).
Введем систему координат так, как показано на рис (2).
Составим уравнения равновесия:
1)

1*) 
рис 2.
2. Tело
№ 3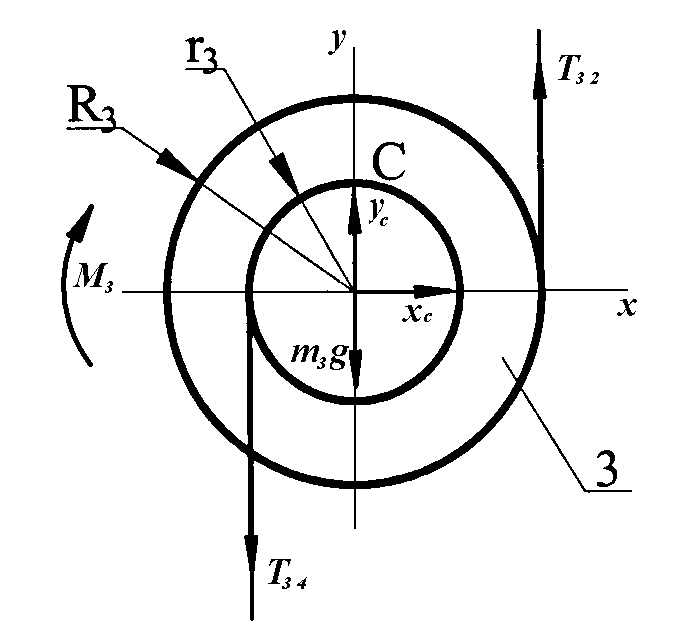
Изобразим все заданные силы приложенные к телу 3.
Заданные силы:
cила тяжести (m3g), силы натяжения нити (T34 , T32), силы реакции опоры (yc xc).
Введем систему координат так, как показано на рис (3).
Составим уравнения равновесия:
1)

2)

3)

рис (3)
1*)

2*)

3*)

По
4-ой аксиоме статики

Из 3-его уравнения определяем T32.

Из 2-го уравнения определяем yc;
