

5. Кинематичесий расчет привода
5.1. Порядок кинематического расчета
Целью кинематического расчета является разработка кинематической схемы (КС) привода. Расчет выполняется на основе графо-аналитического метода.
Порядок кинематического расчета:
Выбор компоновки привода;
Выбор структуры привода;
Разработка КС;
Выбор электродвигателя;
Построение структурной сетки;
Построение графика частот вращения и определение передаточных отношений;
Расчет чисел зубьев зубчатых колес;
Оформление КС.
Основными конструктивными схемами ПГД ступенчатого регулирования являются схемы, применяемые в универсальных станках:
с односкоростным электродвигателем и шестеренной коробкой скоростей;
с двухскоростным электродвигателем и шестеренной коробкой скоростей.
В шлифовальных, а также специальных (например, высокоскоростных фрезерных) станках применяется схема с электрошпинделем, когда шпиндельный узел встраивается в статор электродвигателя переменного или постоянного тока.
В ПГД бесступенчатого регулирования применяется схема с регулируемым электродвигателем постоянного тока
Кинематический расчет привода имеет свои особенности в зависимости от типа привода – ступенчатого или бесступенчатого регулирования.
При ступенчатом регулировании ряд частот вращения целесообразно строить по геометрическому закону. Он позволяет не только обеспечить постоянный перепад скоростей резания при переходе с одной частоты на другую, но и нормализовать значения частот вращения и передаточных отношений в пределах всего ПГД [4,5].
5.2. Исходные данные для кинематического расчета
Исходными данными для кинематического расчета являются:
Число ступеней регулирования z. Число ступеней регулирования обычно задается в задании на проектирование. Обычно оно представляет собой число, разлагающееся на множители 2 и 3, и чаще всего имеет значения 6, 8, 9, 12, 16, 18, 24;
Предельные значения частот вращения на выходе ПГД nmin и nmax. Отношение максимальной и минимальной частот вращения представляют собой диапазон регулирования ПГД:
R = nmax / nmin (2)
Эти значения определяют в результате расчета режимов резания (таблица 2);
Значение знаменателя ряда частот вращения φ. Значения φ стандартизованы и равны 1.06; 1.12; 1.26; 1.41; 1.58; 1.78; 2.0. В станках средних размеров применяют значения 1.26 и 1.41; значение 1.12 применяется, когда требуется более точная настройка на заданный режим; в приводах со сменными колесами рекомендуются значения 1.06, 1.12, 1.26.
Между величинами z, nmax, nmin, и φ cуществует соотношение
![]() φ
= (nmax/nmin
)z
-1
φ
= (nmax/nmin
)z
-1![]() (3)
(3)
5.3. Выбор компоновки пгд
Компоновка ПГД зависит от типа станка, класса точности. ПГД может выполняться совмещенным или разделенным. В совмещенном приводе шпиндельный узел (ШУ) и коробка скоростей размещаются в одном корпусе. В разделенном приводе – в разных корпусах, соединенных клиноременной или ременной передачей. Разделенный привод применяют в прецизионных станках (рис. 1).
Совмещенный привод выполняют как в станках с неподвижными шпиндельными бабками (ШБ) (токарные, сверлильные, координатно- расточные станки),

Рис.1. Компоновка разделенного
ПГД токарно-винторезного станка
так и перемещающимися (продольно-фрезерные, расточные) с двигателями фланцевого исполнения, размещаемыми на корпусе ШБ. Примеры компоновок совмещенного ПГД и схемы расположения групп передач приведены на рис. 2.
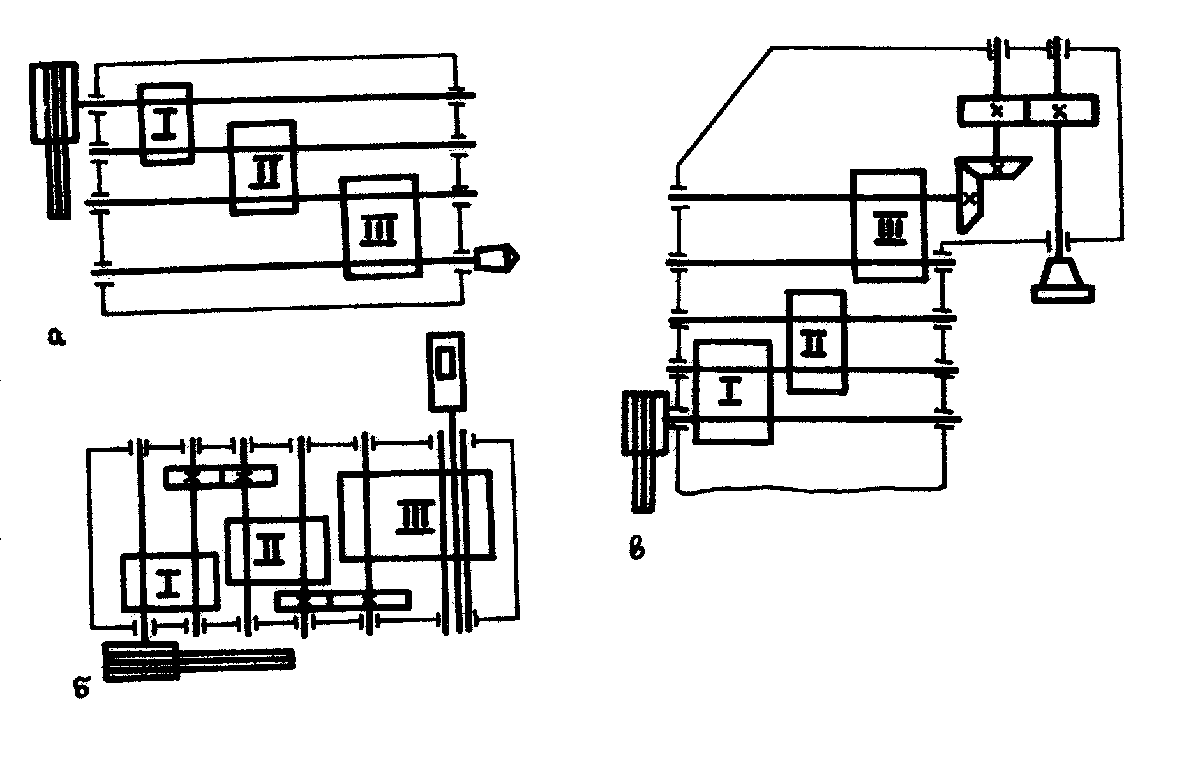
Рис.2. Схема расположения групп передач в совмещенных ПГД: а – токарного, б – сверлильного, в – вертикально-фрезерного станка