

2. Для изменения величин скоростей у исполнительных органов станка служат механизмы изменения передаточных отношений
(органы настройки). К таким механизмам относятся коробки скоростей и подач, в которых изменение их передаточного отношения осуществляется за счет сменных зубчатых колес (рис. З.6. а), передвижных
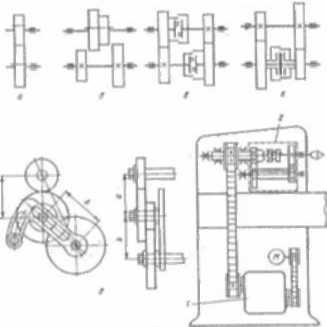
Рис.3.6. Механизм изменения передаточных отношении: а—однопарная гитара сменных зубчатых колес; б—двухвенцовый передвижной блок зубчатых колес; в—кулачковые муфты; г—двухсторонняя фрикционная муфта; д—двухпарная гитара сменных зубчатых колес с переменным межцентровым расстоянием в каждой паре;
е— переборное устройство.
колес или блоков зубчатых колес (рис. 3.6,б), колес не передвигаемых вдоль вала, но сцепляемых с ним при включении кулачковых (рис. З.6,в), фрикционных (рис. 3.6,г) или электромагнитных муфт
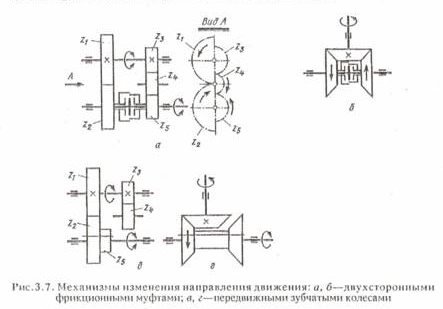
3. Реверсивные механизмы используются для изменения направления движения (реверсирования) рабочих органов или элементов станка механическим способом (рис 3.7). Наряду с механическим реверсированием в станках широко применяют электрическое, путем изменения вращения ротора электродвигателя и гидравлическое с помощью золотниковых гидрораспределителей.
4. Суммирующие (дифференциальные) механизмы в станка: предназначены для сложения движений и применяются для увеличе ння диапазона настройки кинематических цепей в станках со сложны ми кинематическими группами и для коррекции основных движений. В качестве суммирующих механизмов могут выступать реечные, винтовые, реечные, планетарные зубчатые и другие передачи.
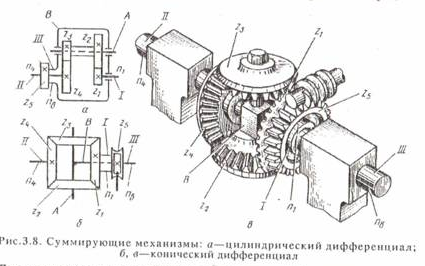
Планетарные зубчатые механизмы содержат колеса, оси А которых перемещаются в пространстве (рис. 3.8.а ,б). Эти колеса называют сателлитами, а звено, несущее ось сателлитов, называется водилом В. Таким образом, планетарный механизм содержат три звена /, // и ///(В), и в зависимости от сочетаний тех ролей, которые выполняют каждое из его звеньев, механизм реализует разные функции.
В станках среди суммирующих механизмов, выполненных на базе планетарных зубчатых передач, наибольшее распространение получил
конический дифференциал (рис. 3.8, б,в) с коническими колесами, имеющими одинаковое число зубьев, и одним из входов в виде червячной передачи.
|
|
|
|
Для расчёта передаточного отношения конического дифференциала с одинаковыми числами зубьев колес можно строить графики скоростей (см. выше) или использовать формулу Виллиса:

Знак "минус" перед единицей означает, что вращение колес z1 и z4происходит в разных направлениях (при неподвижном водиле). Так, например, для конического дифференциала при одновременном вращении водила с частотой nв и колеса z1 с частотой n1 ведомым является колесоz4. для которого суммарная частота вращения определяется по формуле
n4=2nв±n1
где знак "минус" — при одинаковых направлениях вращения ведущих звеньев дифференциала, а "плюс" — при разноименных направлениях вращения.
5. В станках для сообщения исполнительным органам прямолинейного движения используют ряд передач и механизмов. К передачам относятся реечные и винтовые, рассмотренные ранее, а к механизмам — кривошипно-шатунные, кулисные, кулачковые (рис. 3.9) и другие.
|
|
