

Раздел 2. Механизмы станков
I. В механизмах станков для передачи движения от одного звена к другому служат (рис. 3.5) ременные, цепные, зубчатые, реечные, винтовые и другие передачи. Некоторые из них могут преобразовывать один вид движения в другой, например, вращательное движение в поступательное. По принципу действия механические передачи делят на передачи трения и зацепления. К передачам трения относятся ременные передачи с плоским (рис. 3.5.а), клиновым (рис. 3.5,б), поликлиновым (рис. 3.5,в) и круглым ремнем. К передачам зацепления — зубчато-ременные (рис. 3.5,г), цепные (рис. 3.5,д), зубчатые и другие передачи. Каждая передача содержит ведущее и ведомое звенья, а ременные и цепные передачи к тому же еще и гибкий элемент между ними — приводной ремень или приводную цепь.
Среди зубчатых передач наибольшее распространение имеют ци линдрические передачи с прямыми (рис. 3.5,е), косыми (рис. 3.5,ж) и шевронными (рис. 3.5,и) зубьями, конические передачи с прямыми (рис. 3.5,к) и дуговыми (рис. 3.5,л) зубьями, червячные передачи (рис. 3.5, м). Зубчатые, ременные и цепные передачи предназначены для передачи вращательного движения
Реечные и винтовые передачи образуют кинематическую пару, у которой одно звено вращательное, а сопряженное с ним поступательное. Поэтому эти передачи предназначены не только для передачи движении, но и для преобразования вращательного движения в поступательное.
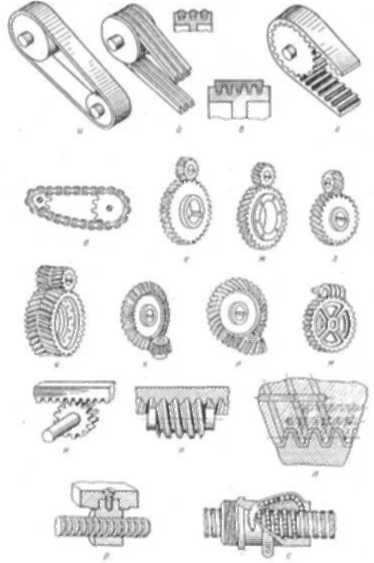
Рнс.3.5. Механические передачи движения: а - плоским ремнём; б— клиновидным ремнем; в-поликлиновая ремённая передача; г-зубчато-ремённая; д—цепная; е—цилиндрическая с прямыми зубьями; ж, з—цилиндрическая с косыми и винтовыми зубьями; и-цилиндрическая с шевронными зубьями; к—коническая с прямыми зубьями; л-
коническая с дуговыми зубьями; м—червячная;и—|реечная с цилиндрическимл колесом; о—реечная с цилиндрическим черняком; п—реечная гидростатическая; р—винтовая скольжения; с –винтовая качения.
Таблица 3.3
Среди
реечных передач находят применение
реечная с зубчатым цилиндрическим
колесом (рис. 3.5.и) и червяком двух типов
— скольжения (рис. 3.5,
о) - и
гидростатическим (рис. 3.5,н). Винтовую
передачу образует пара винт-гайка,
которая может быть трех типов — скольжения
(рис. 3.5,р) качения (рис. 3.5,с)и
гидростатической. 
Условные обозначения перечисленных выше передач на кинематических схемах в соответствии с ГОСТ 2.770-68 приведены в табл. 3.3.
Каждая из перечисленных передач характеризуется основным кинематическим параметром, определяющих соотношение движений между их звеньями. Для вращательных передач таким параметром является их передаточное число u, которое указывает на отношение частоты вращения ведущего звена к частоте вращения ведомого звена u=nвм/nвщ. Однако при расчете движений и составлении уравнений кинематического баланса кинематических цепей удобнее пользоваться передаточным отношением, т.е. величиной обратной передаточному числу i =1 /u = nвщ/nвм.Так как частоты вращения передач обратно пропорциональны диаметрам d колес и их числам зубьев z, то в соответствии с этим передаточные отношения вращающихся передач будут определяться как отношения диаметров ведущих dвщ звеньев к диаметрам ведомых dвм звеньев или их геометрических или конструктивных параметров. Для ременных передач i=dвщ/dвм (без учета проскальзывания ремня), для цепных и зубчатых цилиндрических и конических передач i=zвщ/zвм и для червячной передачи i= k/z, где к — число заходов червяка.
У вращательно-поступательных передач соотношение движений между их звеньями определяется величиной перемещения поступательно движущегося звена, соответствующей одному обороту вращающегося звена. Эта величина и принимается за кинематический параметр, характеризующий передачу. Для реечных передач таким параметром будет величина, равная πmz, где z— число зубьев, m — модуль реечного колеса, а для винтовых передач — величина, равная шагу Р резьбы.