

Lecsist2_1
.pdf53
Рис. 3.13
Кожний двійковий розряд цифрового коду керує своїм електронним ключем. Якщо у відповідному розряді вхідного коду нуль, то ключ замикається, якщо одиниця – ключ замикається, опорна напруга прикладається до резистора та по ньому протікає струм. Струми кожного резистора сумуються та вихідна напруга пропорційна загальному струму, та, відповідно, значенню цифрового коду.
Схема ЦАП типу R-2R показана на рис. 3.14.
Рис. 3.14
ЦАП типу R-2R містить по два резистора на розряд. Один ввімкнений послідовно з розрядним ключем, другий ввімкнений у сумуючу шину. Кожний із замкнених ключів вносить свій внесок в вихідну напругу, утворюючи результуючу сумарну напругу, яка відповідає цифровому коду.
Із-за обмежень, пов‟язаних з технологією виготовлення резистивної матриці, ЦАП з резистивною матрицею використовується у перетворювачах з малою роздільною здатністю (до 10 двійкових розрядів). Ланцюг R-2R порівняно простий у виготовленні, так як у ньому використовується лише 2 значення опорів, які можна легко узгодити.
Ключі у такому ЦАП повинні комутувати опорну напругу з великою точністю. Теоретично це означає, що вони повинні мати нульовий опір у замкненому стані та нескінчений у розімкненому.
3.5 СТРУКТУРНА СХЕМА ДЕКОДЕРА (ЦАП) СИСТЕМИ ІКМ-30.
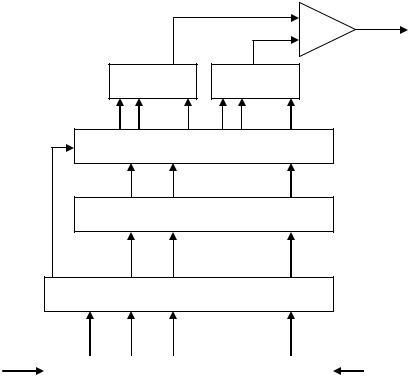
Розглянемо структуру декодера системи ІКМ-30. Амплітудна характеристика декодера (характеристика перетворення) визначається як зворотна функція по відношенню до характеристики кодера. Тому загальна характеристика тракту, яка включає кодер та декодер, лінійна ( з точністю до кроку квантування ). При нелінійному декодування здійснюється перетворення за допомогою цифрового експандера 7-символьного коду у 12-символьний. Комбінація символів на виході цифрового експандера використовується для керування ФЕС ( формувачів еталонних
54
сигналів – суматорів з вагою ). Відновлений однополярний сигнал інвертується або передається без змін на вихід декодера ( у залежності від знакового символу d1 кодового слова ).
Структурна схема декодера зображена на рис. 3.15.
|
|
|
|
|
а |
- |
АІМ |
|
|
|
|
|
в |
||
|
|
|
|
|
+ |
сигнал |
|
|
|
|
|
|
|
||
|
|
ФЕС-А |
|
ФЕС-В |
|
|
|
|
|
|
(ΣА) |
|
(ΣВ) |
|
|
|
1 |
2 … 12 |
1 |
2 … 12 |
|
|
|
|
|
|
Логіка вибору ФЕС |
|
|
||
|
h1 |
h2 |
… |
h12 |
|
|
|
|
|
Цифровий експандер |
|
|
|||
d1 |
d2 |
|
d3 |
… |
d8 |
|
|
|
Регістр з логікою керування |
|
|
||||
ІКМ |
d1 |
d2 |
d3 |
… |
d8 |
||
сигнал |
|||||||
|
|
|
|
|
fT |
||
Перетворювач парал. коду у послід. |
|||||||
|
|
||||||
|
|
|
|
|
|
|
|
Рис. 3.15
Аналогова частина декодера містить:
-два однакових формувача еталонних сигналів ФЕС-А та ФЕС-В, які по призначенню аналогічним пристроям кодера;
-диференційний підсилювач, який перетворює однополярні відліки сиг-
налу АІМ у біполярний сигнал.
Функціональними вузлами цифрової частини декодера є:
-перетворювач послідовного двійкового коду у паралельний;
-регістр з логікою керування, призначений для зберігання кодового слова на протязі інтервалу часу, необхідного для отримання заданої тривалості відліків вихідного АІМ сигналу;
-цифровий експандер, який виконує перетворення 7-символьного коду у 12-символьний;
-логічні елементи вибору ФЕС, які пропускають сигнали цифрового експандера на входи одного з ФЕС у залежності від значення символу у знаковому розряді.
55
3.6. УТВОРЕННЯ ГРУПОВОГО СИГНАЛУ В ЦСП З ІКМ
Формування групового сигналу в ЦСП може здійснюватись на основі часового РК.
|
|
|
|
КІ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
канали |
1 |
|
2 |
|
|
|
|
|
N |
1 |
|
|
|
2 |
|
|
|
|
N |
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1-й відлік |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2-й відлік |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 3.16
При цьому послідовно у часі передаються кодові групи, які відповідають відлікам квантованих АІМ сигналів різних каналів. Проміжок часу, який відводиться на передавання кодової групи одного каналу називається канальним інтервалом (КІ). Відповідні ЦСП називають системами ІКМчасовим РК.
Можливий інший спосіб формування групового сигналу, при якому поєднуються частотне розділення каналів та імпульсно-кодова модуляція. В цьому випадку методами ЧРК формується стандартна група каналів. Потім груповий сигнал піддається дискретизації за часом, квантуванню і кодуванню. В результаті відповідна група передається на протилежну кінцеву станцію у вигляді цифрової послідовності. Відповідні ЦСП називають системами ІКМчастотним РК. На приймальному кінці в таких ЦСП цифрова послідовність декодується, а потім методами ЧРК груповий сигнал розділяється на канальні сигнали.
Розглянемо структурну схему ЦСП з ІКМ - часовим РК (рис.3.17)
1 |
|
Код |
У лінію |
|
ЕК |
ПК |
|||
|
2 |
ЕК |
|
|
|
|
N |
ЕК |
ГО пер |
|
||
N |
|
|
|
ЕК |
ГО пр |
2 |
|
|
|
ЕК |
ПрСС |
1 |
ЕК |
Дек |
Р |
Із лінії |
|
|
Рис. 3.17
Первинний сигнал (наприклад, телефонний) подається на фільтр нижніх частот, який обмежує спектр сигналу до 3,4 кГц. За допомогою дискретизатора (електронного ключа ЕК) здійснюється дискретизація за часом з частотою Fд.
56
Електронні ключі різних каналів замикаються в моменти, які відрізняються один від одного на величину КІ
tк = Тд/Nк
де Тд =1/ Fд - період дискретизації Nк - число каналів.
На виході дискретизаторів відліки з‟єднуються, утворюючи груповий АІМ сигнал, який поступає на кодуючий пристрій КОД. На виході КОД утворюється груповий цифровий сигнал у вигляді імпульсної послідовності, тактова частота якої:
fт = Fд m Nк
де m - розрядність кодової групи.
На виході тракту СП з ІКМчасовим РК встановлюється перетворювач коду (ПК), який перетворює груповий цифровий сигнал так, щоб забезпечити його передавання по лінійному тракту з максимальною завадостійкістю і мінімальними спотвореннями.
В тракті приймання прийнятий цифровий сигнал декодується і методами часового розділення за допомогою електронних ключів розподіляється по каналам СП. Встановлений на вході приймального тракту регенератор (Р) відновлює форму імпульсів ІКМ сигналу, змінену внаслідок впливу завад та спотворень в лінійному тракті, а також здійснює зворотне перетворення імпульсної послідовності, зміненої в ПК. Фільтр нижніх частот на виході тракту приймання кожного каналу виділяє первинний безперервний сигнал із спектру канального АІМ сигналу.
Комутацією електронних ключів, роботою пристроїв кодера, декодера і регенератора керують сигнали, які виробляються генераторним обладнанням (ГО). Для правильного декодування і розділення сигналів на прийманні необхідно, щоб ГО передавальної і приймальної станцій працювали синхронно. Для цього в ІКМ сигнал, який передається в лінійний тракт, додається синхронізуючий сигнал у вигляді імпульсу або групи імпульсів, які несуть інформацію про частоту і моменти появи керуючих сигналів ГО. На приймальній станції синхросигнал виділяється приймачем ПрСС, поступає на ГО приймання і підстроює його під роботу ГО передавання протилежної станції.
3.7. СИНХРОНІЗАЦІЯ В СИСТЕМАХ З ІКМЧАСОВИМ РК.
В СП з КМчасовим РК розрізняють тактову і циклову синхронізацію. Тактова синхронізація забезпечує рівність частот прямування імпульсів в
пристроях обробки сигналів на передавальній і приймальній станціях, наприклад, в кодері і декодері. Відсутність тактової синхронізації може призвести, наприклад, до того, що декодер не закінчить декодування кодової комбінації попереднього каналу, коли на його вхід поступить кодова група наступного каналу.
57
Для здійснення тактової синхронізації ГО приймальної станції керується тактовою частотою, яка виділяється із прийнятого ІКМ сигналу. ІКМ сигнал можна представити у вигляді суми регулярної і випадкової складових.
G(ω) |
Gp (ω) |
Gc (ω) |
|
t |
|
t |
|
t |
ω |
|
|
0 |
ωт 2ωт 3ωт 4ωт 5ωт 6ωт |
Рис. 3.18
Спектр регулярної складової Gp( ) є дискретним і містить непарні гармоніки тактової частоти, в тому числі і першу. Цю гармоніку можна виділити вузькосмуговим фільтром.
Випадкова складова має безперервний спектр Gс( ). Повністю відділити гармоніку тактової частоти від усіх складових спектру ІКМ сигналу неможливо, оскільки у смугу перепускання вузькосмугового фільтру попадають складові неперервного спектра. Внаслідок цього форма сигналу виділеної тактової частоти відрізняється від синусоїдальної. Це може призвести до порушення тактового синхронізму і появи помилок при декодування.
Циклова синхронізація.
Циклом передавання називають сукупність сигналів, які передаються за час між двома сусідніми відліками сигналу одного каналу, тобто за період дискретизації. Таким чином, частота прямування циклів і частота дискретизації співпадають (Fд = fц). Для правильного розподілу декодованих АІМ сигналів по відповідним приймальним канальним трактам необхідно, щоб замикання електронних ключів даного каналу на приймальній і передавальній станціях відбувались одночасно. Для забезпечення синхронної і синфазної роботи ключів однойменних каналів в склад групового сигналу вводиться спеціальний синхросигнал. Цей сигнал володіє розпізнавальною ознакою, яка дозволяє відрізнити синхросигнал від інформаційних імпульсів. Такою ознакою може бути структура групи імпульсів, вибрана так, щоб вірогідність кодової комбінації такої ж структури була мала.
Додатковою розпізнавальною ознакою синхросигналу є частота проходження, яка звичайно вибирається постійною, тоді як поява інформаційних сигналів носить випадковий характер. Так в системі передавання ІКМ-30 кодова група СС містить сім розрядів і має вигляд 0011011. Ця група передається в перших канальних інтервалах кожного парного циклу. Таким чином, частота прямування циклового синхросигналу удвічі менше частоти дискретизації і дорівнює 4 кГц.
При включенні апаратури в роботу цикловий синхронізм встановлюється не одразу, а через певний проміжок часу, який має назву час входження у синхронізм. Цей час має бути достатньо малим (не більший ніж декілька мілісекунд). У протилежному випадку при випадковій втраті синхронізму може відбутися роз‟єднання абонентів приладами АТС.
58
Пошук стану синхронізму здійснюється послідовним контролем та порівнянням структури кодових груп групового сигналу з еталоном синхросигналу, який виробляється ГО приймальної станції. Якщо кодова група не відповідає еталону, приймач синхросигналу здійснює зсув послідовності керуючих імпульсів, які виробляються ГО приймальної станції, на один період тактової частоти. Такий зсув приймального ГО по відношенню до передаючого здійснюється, поки між кодовою групою та еталоном не встановиться однозначна відповідність, яка відповідає стану синхронізму у системі.
В якості приклада розглянемо реалізацію циклової синхронізації у системі ІКМ-30.
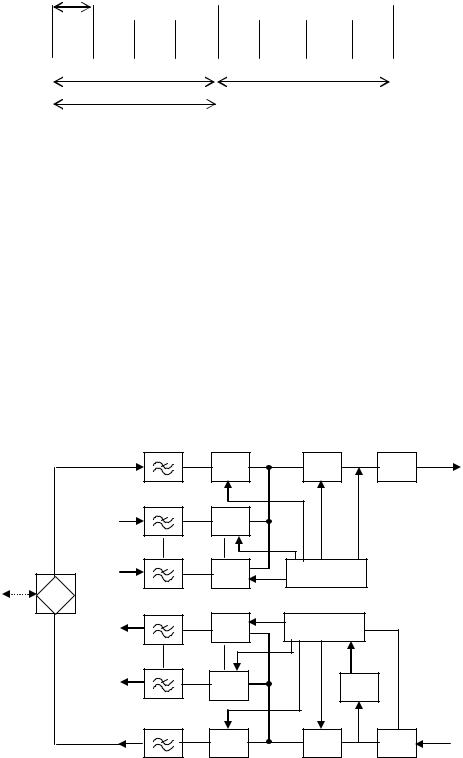
На рис. 3.19 представлена спрощена структура циклу цієї системи передавання.
Рис. 3.19
Цикл передавання відповідає рекомендації МККТТ G.732 та складається із 32 канальних інтервалів (КІ0 – КІ30). 30 канальних інтервалів призначені для передавання інформації, один – для передавання сигналу циклової синхронізації (ЦСС), один – для передавання сигналів керування та взаємодії (СКВ), які виробляються приладами АТС, та надциклового синхросигналу (НЦСС). Кожен КІ складається із восьми розрядів (Р1 – Р8). Частота прямування циклів дорівнює частоті дискретизації:
FЦ = FД = 8 кГц (TЦ = 125 мкс).
Частота прямування канальних інтервалів: |
|
FК = FЦ k = 8 кГц 32 = 256 кГц |
(TК ≈ 4 мкс); |
k – кількість канальних інтервалів. |
|
Тактова частота: |
|
FТ = FЦ k n = 8 кГц 32 8 = 2048 кГц |
(TТ ≈ 0.5 мкс); |
n – кількість розрядів у кодовій групі. |
|
Цикловий синхросигнал передається у КІ0 у парних циклах на позиціях Р2
– Р8 та має вигляд 0011011, а у непарних циклах на позиції Р2 передається 1. Позиція Р1 у КІ0 призначена для передавання дискретної інформації.
УКІ1 – КІ15, КІ17 – КІ31 передається інформація, яка відповідає 30 сигналам ТЧ. При цьому КІ8 може відводиться для передавання дискретної інформації.
Уканальному інтервалі КІ16 на позиціях Р1, Р2 та Р5, Р6 передається по два СКВ для кожного сигналу ТЧ. Передавання СКВ здійснюється почергово в 15 циклах – для 1- та 16-го, 2- та 17-го, 3- та 18-го, … , 15та 30-го сигналів ТЧ. Для правильного розподілу СКВ передбачено синхронізація роботи пристроїв СКВ. З цією метою 16 циклів об‟єднуються у надцикл. У 16-му циклі у КІ16 на позиціях Р1 – Р4 передається надцикловий синхросигнал. Частота прямування надциклів:
FНЦ = FЦ / 16 = 500 Гц.
З такою частотою передається кожний СКВ.
59
На позиціях Р3, Р6 КІ0 у непарних циклах та Р6 КІ16 Ц0 формуються сигнали про аварію приймальної частини ІКМ – 30, які передаються у приймальну частину апаратури.
Пошук стану синхронізму здійснюється у два етапи: спочатку встановлюється стан циклового, а потім надциклового синхронізму. Пошук циклового синхронізму здійснюється у зоні, яка дорівнює двом циклам передавання ( що відповідає періоду прямування синхросигналу) шляхом послідовного аналізу 7- розрядних кодових комбінацій на відповідність синхросигналу. Якщо група, яка аналізується, відрізняється від синхросигнала, здійснюється зсув на одну позицію, та наступною аналізується 7-розрядна кодова група, яка містить шість символів попередньої групи. Такий аналіз здійснюється, поки кодова комбінація не буде аналогічна синхросигналу. Наступною аналізується комбінація, яка розташована на таких саме позиціях циклу передавання, але зі зсувом на період прямування синхросигналу. Якщо формування кодової групи, аналогічної синхросигналу, викликано випадковим сполученням у груповому сигналі одиниць та нулів інформації ( ложна синхрогрупа ), у наступному періоді на позиціях, які аналізуються, з‟явиться кодова група, яка відрізняється від синхрогрупи, та відбудеться зсув. Такий процес послідовного аналізу буде продовжуватись, поки не буде знайдений істиний цикловий синхросигнал.
Для того, щоб при спотворенні символів циклового синхросигналу не почався процес пошуку синхронізму, вводиться накопичувач по виходу із синхронізму, який забезпечує перехід к пошуку синхронізму тільки після чотириразового підряд спотворення синхросигнала, імовірність чого достатньо мала.
У процесі пошуку синхросигналу, для того, щоб не збільшувати час пошуку, цей накопичувач відключається, та включається знов тільки після встановлення стану циклового синхронізму. Наявність циклового синхронізму фіксується накопичувачем по входу у синхронізм, який спрацьовує після дворазового підряд знаходження синхросигналу на одних та тих саме позиціях у циклі передавання. Імовірність помилкового спрацювання накопичувача по входу у синхронізм достатньо мала.
Після фіксації наявності циклового синхронізму починається процес пошуку надциклового синхросигналу, який передається комбінацією 0000 в нульовому циклі у КІ16 на позиціях Р1 – Р4. Ця комбінація може бути легко впізнана, поскільки в усіх циклах ( крім нульового ) у КІ16 на позиції Р4 передається 1.
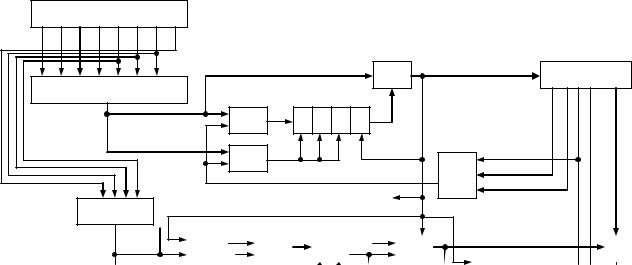
Розглянемо структурну схему циклової синхронізації приймальної частини системи ІКМ – 30 (рис 3.20).
|
|
|
|
Р3 |
|
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
І3 |
|
ГО1 |
|
|
|
ДШ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
НІ1 |
1 |
2 |
3 4 |
|
|
|
|
|
|
|
|
|
І2 |
|
|
|
|
Р8 |
|
|
|
|
|
|
|
|
|
|
|
КІ0 |
|
|
|
|
|
|
|
|
|
|
|
|
І1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
заборона |
|
парний |
|
|
|
|
ДШ2 |
|
|
|
|
кодера |
|
||
|
|
|
|
|
|
|
|
|
цикл |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
АБО1 |
|
|
НІ1 |
|
1 |
2 |
|
|
І5 |
|
|
заборона |
ГО2 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
60
Рис. 3.20
Приймач синхросигналу містить приймач циклового синхросигналу, приймач надциклового синхросигналу та розподільник СКВ.
У приймачі циклового синхросигналу груповий сигнал надходить на вхід регістра зсуву РЗ. Кожна комбінація символів, яка аналогічна цикловому синхросигналу, обумовлює наявність імпульсів на виході дешифратора ДШ1. Якщо передавальна та приймальна частини апаратури знаходяться у стані циклового синхронізму, сигнал з виходу дешифратора співпадає з часом з сигналом на виході елемента І1, який відповідає часовій позиції Р8 КІ0 у кожному парному циклі. При цьому на виході логічного елемента НІ1, який з‟єднаний з накопичувачем по виходу із синхронізму, сигнал відсутній. На виході І2, який виконує функції накопичувача по входу у синхронізм, з‟являється сигнал скидання у нульовий стан перших трьох комірок накопичувача по виходу із синхронізму. Остання (четверта) комірка скидається у нульовий стан безпосередньо з виходу ДШ1. В результаті накопичувач по виходу із синхронізму при роботі системи у режимі циклової синхронізації буде повністю розряджений.
Помилкові синхрогрупи, які містяться у груповому сигналі, не співпадають з часом з сигналом на виході логічного елемента І1, та тому не викликають появу сигналів помилки на вході накопичувача по входу у синхронізм. При одиночних спотвореннях синхрогруп сигнал з виходу логічного елементу І1 проходить через відкритий логічний елемент НІ1 на вхід накопичувача по виходу із синхронізму. Але при цьому накопичувач не встигає повністю зарядитися, та збою циклового синхронізму не відбувається. Сигнал з виходу ДШ1, який відповідає першій неспотвореній синхрогрупі, через логічний елемент І2 скине накопичувач у нульовий стан.
При відсутності синхронізму у чотирьох наступних підряд циклах (періодів прямування циклового синхросигналу 0.25 мс) накопичувач по виходу із синхронізму заповниться та здійснює заборону декодера та ввімкнення сигналу аварії циклової синхронізації, а також через логічний елемент АБО1 – заборону приймача СКВ та включення сигналів аварії системи надциклової синхронізації. Одночасно відкривається логічний елемент І3, та перший імпульс, обумовлений прийманням помилкової синхрогрупи, встановить у нульовий стан подільник частоти у ГО1 та останню комірку у накопичувачі по виходу із синхронізму. В результаті наступне впізнання групового синхросигналу буде проводитись на цих саме позиціях, але у наступному циклі (через 0.25 мс). Якщо повторно на цих позиціях помилкова синхрогрупа не сформується, сигнал з виходу логічного елементу І1 знов заповнить накопичувач по виходу із синхронізму, відкриється логічний елемент І3 та пошук синхрогрупи продовжиться. Якщо на позиціях, які аналізуються помил-
61
кова синхрогрупа з‟явиться два рази підряд, імпульс з виходу ДШ1 пройде через відкритий логічний елемент І2, який виконує функції накопичувача по входу у синхронізм, та скине накопичувач по виходу із синхронізму у нульовий стан. Пошук синхрогрупи у даному випадку буде продовжено тільки після чотириразової підряд появи на позиціях, які аналізуються, кодових груп, які відрізняються від синхросигналу. Однак імовірність помилкового заповнення накопичувача по входу у синхронізм достатньо мала. Після дворазового підряд знаходження істіної синхрогрупи сигнал з виходу логічного елемента І2 скине накопичувач по виходу із синхронізму в нульовий стан.
Приймач надциклового синхросигналу будується аналогічно приймачу циклового синхросигнала. Кожна комбінація символів, аналогічна надцикловому синхросигналу, викликає появу імпульсів на виході ДШ2. Контроль надциклового синхросигналу на відповідність часовому положенню сигналу, який формується логічним елементом І4, здійснюється тільки у режимі циклової синхронізації. Це забезпечується логічним елементом НІ2, на вхід якого подається сигнал з накопичувача по виходу із циклового синхронізму.
При наявності циклового та надциклового синхронізму на виході логічного елементу І5 сигнал відсутній, а з виходу логічного елемента І6, який виконує функцію накопичувача по входу у синхронізм, надходить сигнал скидання першої комірки накопичувача по виходу із надциклового синхронізму. При відсутності надциклового синхронізму у двох підряд надциклах на виході останньої комірки накопичувача виробляється сигнал заборони приймачів СКВ та аварії у системі надциклової синхронізації. Одночасно відкривається логічний елемент І5 та перший імпульс, який з‟явився на виході ДШ2, при наявності циклового синхронізму встановить подільник частоти у ГО2 та другу комірку накопичувача у нульовий стан. При повторному формуванні надциклового синхросигналу на цих же позиціях через логічний елемент І6 скидається у нульовий стан перша комірка накопичувача.
Крім вказаних функцій, у приймачі синхросигналу за допомогою логічних елементів І із групового сигналу виділяються СКВ.
62
3.8. ДЕЛЬТА-МОДУЛЯЦІЯ І ЇЇ ЗАСТОСУВАННЯ В ЦСП.
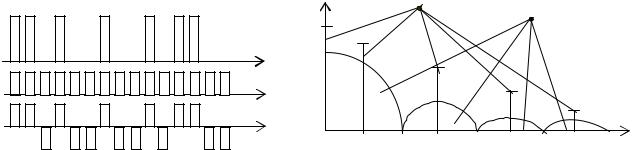
Для перетворення АІМ сигналів в цифрову форму може бути використана ДМ. При ДМ кодується не квантоване значення аналогового сигналу, а знак приросту даного відліку відносно попереднього. Інформація про знак передається за допомогою дворівневого (+1 або -1) однорозрядного коду. Безперервний сигнал S(t) в цьому випадку замінюється ступінчатою функцією, яка приблизно співпадає з сигналом. Приріст ступінчатої функції здійснюється в момент дискретизації за часом на величину кроку квантування .
S(t) |
V(t) |
|
Перенавантаження |
||
|
||
|
t |
Uі
 t
t
V(t)
t |
t |
|
Uвих |
Формування цифрового сигналу при ДМ
Декодування ДМ сигналу
t
Рис. 3.21
Цифровий сигнал v(t) являє собою послідовність імпульсів, полярність яких визначається знаком приросту відліків.
Декодування ДМ сигналу здійснюється інтегратором, який перетворює цифровий ДМ сигнал в ступінчатий. На виході інтегратора включається фільтр нижніх частот, який згладжує ступінчатий сигнал і приблизно відтворює вихідний сигнал. При ДМ, також як і при ІКМ виникають шуми квантування, які залежать від кроку квантування. Крок квантування доцільно вибирати як можна менше для зменшення помилки квантування. З іншого боку, при малому кроці квантування швидкість зміни ступінчатого сигналу на виході інтегратора виявляється невеликою. На інтервалах часу, де крутизна кодованого сигналу велика, різність між неперервним сигналом і ступінчатим сигналом виявляється великою і шуми квантування різко зростають. Це називається перенавантаженням кодера.
Для запобігання перенавантаження при ДМ необхідно підвищення частоти дискретизації. Як показують розрахунки, для передавання телефонних повідомлень необхідно, щоб Fд = 150...200 кГц. При восьмирозрядній ІКМ Fд = 64 кГц, тобто менше, ніж при ДМ, відповідно менша й смуга частот лінійного тракту.
Утворення групового сигналу при ДМ здійснюється посилкою імпульсів різних каналів по черзі і їх розподілом за часом.
Потрібну частоту дискретизації можна знизити, якщо ввести змінний крок квантування, який залежить від швидкості зміни сигналу - на ділянках з великою швидкістю крок квантування вибирається більшим. Така ДМ називається компан-