

Этапы развития устройств автоматики и телемеханики.
Автоматы издавна интересовали человечество. Автоматические приборы создавались в первую очередь для облегчения физического труда, а иногда и в других целях. Известен механик древности Герон Александрийский еще за 2 в. до н. э. Написал труд под названием «Театр автоматов». Однако автоматические приборы древних не получили дальнейшего развития. Эти приборы, основанные на основе принципа силы тяжести, были достаточно примитивные.
Дальнейшее развитие автоматических устройств приостановилось почти вплоть до 19 в. До этого периода можно отметить появление механических гиревых и затем пружинных часов и простейших приборов, облегчающих вычислительные операции.
Однако еще с 17 в. для поддержания заданного динамического режима таких процессов управления, которые невозможно было возложить на человека, начинают создаваться специальные устройства, получившие название регуляторов.
Первый автоматический регулятор, имевший практическое значение был изобретен и построен гениальным русским изобретателем Иванов Ивановичем Ползуновым в 1965 г. это был поплавковый регулятор уровня воды в котле его «огнедействующей машины». Машина Ползунова существовала недолго. Вскоре после смерти изобретателя она была разрушена. Великое изобретение на долгий период было забыто. 19 лет спустя, в 1784 году, автоматический регулятор был вторично «изобретен» английским механиком Джеймсом Уаттом.
Центробежный регулятор Уатта предназначался для поддержания постоянной скорости вращения вала паровой машины. В регуляторе Уатта объединены идея и конструкция конического маятника для уравнения хода водяных мельниц и принцип регулирования Ползунова.
Принцип Ползунова является основным принципом в большинстве современных регуляторов. Идея Ползунова заключается в том, что автоматическое регулирование осуществляется путем сравнения действительного режима с некоторым эталоном, с заданием, и что всякое воздействие на систему для восстановления режима должно осуществляться в зависимости от величины и знака отклонения действительного режима от эталона.
В 18 в. трудами русских инженеров, ученых и техников были предложены замечательные автоматические полуавтоматические устройства и установки.
Так М. В. Ломоносовым была высказана идея об автоматических самопишущих метеоприборах, им же были предложены и первые приборы для зондирования атмосферы. Совместно с Рихманом им был разработан и первый электрометр.
К. Д. Фролов на Алтае построил завод с рядом механических полуавтоматических и автоматических станков. Современником Ломоносова, талантливым механиком-самоучкой И. П. Кулибиным был изобретен и изготовлен ряд физических приборов, а также известные часы-уникум с целой группой автоматически действующих фигур.
В 19 в. развитие электротехники вызвало дальнейший прогресс в области автоматики и переход от механических методов к электрическим.
К. И. Константинов предложил электромагнитный регулятор скорости вращения, в котором изменение центробежной силы приводило к изменению уровня ртути в сообщающихся сосудах и к замыканию одного из ртутных контактов.
В это же время П. Л. Шиллингом было разработано первое электрическое реле. Разработаны и первые реально действующие системы телеграфных аппаратов, являющихся в то же время и первыми телемеханическими устройствами, использующими электроток.
В 1869 г. В.Н.Чикилев создает дифференциальный регулятор горения дуги внедрение которого позволило перейти к широкому использованию дуговых ламп в практике.
В 1871 г. под руководством П.Н.Яблочкова Чикилев разработал новый регулятор для дуговых ламп с электрическим сервомотором – первое устройство электромашинной автоматики.
В 1880 г. М.Н. Карланов разрабатывает первый электрический вибрационный регулятор.
В 1898 г. К.Э.Циолковский изобретает первый в мире электрический прибор для продольной стабилизации дирижабля.
Первые попытки в области разработки теории автоматических регуляторов начали появляться в середине 19 века. Одной из первых была разработка Маковелла «О регуляторах» .
Основоположником теории автоматического регулирования считается проф. Петербургского технологического института Иван Алексеевич Вышнеградский.
В1876 г. был опубликован реферат его классической работы «О регуляторах прямого действия» , где излагались основы теории прямого регулирования паровой машины.
Дальнейшее развитие идеи Вышнеградского получили в работах словацкого ученого Ауреля Стадола, исследовавшего устойчивость ряда типовых схем автоматического регулирования на примерах паровых и гидротурбин.
Теоретическое обоснование проблемы устойчивости дал А.М.Ляпунов в работе, вышедшей в 1892 г.
Большой вклад в развитие теории автоматического управления и регулирования внесли И.Н.Вознесенский, А.А.Андронов, разработавшие аппарат для исследования нелинейных систем; А.В.Михайлов, В.В. Солодовников, развившие частотные методы исслдования.
Появление в начале 19в. железных дорог послужило большим толчком для развития АиТ. Появилась необходимость в передаче распоряжений и получении извещений на большие расстояния по линиям ж.д. Для этих целей служил вначале оптический телеграф , а позднее электромагнитный телеграф, изобретенный А.С.Поповым в 1895 г.
Первые радиотелеграфные установки являлись, посуществу, и первыми радиотелемеханическими системами, в которых приемное реле управляло цепью телеграфного аппарата.
В 20 в. темп развития А и Т значительно ускорился. Создание электронных ламп, а впоследствии полупроводниковых приборов, значительно расширило границы применения А и Т. разрабатывается автоматизация электроприводов, цеха, целого завода создаются поточные автоматические линии; проводится телемеханизация в различных областях народного хозяйства, как например, в управлении электростанциями, ирригационными сооружениями, нефте- и газопроводами.
С 1936 г. на отечественных жд начинает применятся ДУ, при котором из оного пункта по двум проводам производится управление и контроль стрелками и участками.
С 1944 г. широко внедряется автоматическая локомотивная сигнализация с автостопом, значительно повышающая БДД. Автостоп – автоматический прибор, воздействующий на тормозную систему поезда, если машинист не принимает в соответствующих случаях мер к остановке поезда.
Развитие электроники содействовало новому развитию А и Т и позволило осуществить то, что еще недавно представлялось фантазией. Создание искусственных спутников Земли, запуск космических ракет и связь с ними на расстоянии до нескольких сот тысяч километров не возможны без соответствующего прогресса в электроники, А и Т.
Появившаяся после ВОВ 19412-1945гг. вычислительные управляющие машины явились новым видом автоматов, которые выполнят с чрезвычайной быстротой весьма сложные и разнообразные функции. В области вычислительных машин А и Т соприкасаются с новой наукой – кибернетикой.
Современные системы А и Т представляют собой автоматизированные комплексы, работой которых управляют ЭВМ. При этом участие человека в работе таких комплексов практически не требуется. Примеры таких комплексов – это системы управления ядерными энергетическими установками, химическими производствами, выпуском техники, управления движением, космическими полетами.
Элементы систем А и Т.
Общие свойства систем А и Т.
Автоматика – отрасль техники, которая изучает теорию автоматического управления, принципы построения автоматических систем и образующих их технических средств.
Основными видами автоматических систем является система автоматического регулирования, автоматического управления и автоматического контроля.
Целью автоматического регулирования является автоматическое поддержание регулируемой величины или режима работы регулируемого механизма по заданному закону. Типичным примером первого случая является автоматическое поддержание постоянства температуры в каком-либо помещении или печи. Повышение температуры сверх заданного значения автоматически вызывает снижение подачи теплоисточника, при понижении температуры подача теплоисточника автоматически возрастает. В результате устанавливается температура близкая к постоянной.
В приведенном примере регулируемая величина – температура оказывает действие на регулирующий орган, подающий тепло. Этот способ называют обратной связью, являющейся обязательным элементом автоматического регулирования. В данном случае имеет место отрицательная обратная связь, т. к. она действует в направлении обратном действию регулирующего органа.
Автоматическое регулирование можно охарактеризовать как замкнутый процесс, в котором регулирующий орган через сравнивающее устройство воздействует на регулируемую величину, в свою очередь влияющую на регулирующий орган.
Системы автоматического управления разнообразны по своим функциям и сложности. В промышленности автоматизируется как отдельные приводы, так отдельные цехи даже полностью заводы.
Современные металлообрабатывающие станки имеют от одного до нескольких десятков электродвигателей, которые должны работать в определенном порядке и ритме. Автоматизация работы такого станка требует выполнения ряда зависимостей между электродвигателями, соблюдение очередности их включения и выключения и тому подобное. Еще сложнее автоматизация управления комплекса станков цеха и организация поточного производства. В последнем случае необходимо автоматизировать не только все станки, участвующие в производстве изделий, но и транспортные средства для перемещения обрабатываемых деталей с соблюдением заданного ритма производства. В этих условиях неизбежно возникает необходимость в автоматическом контроле и автоматической защите при неполадках.
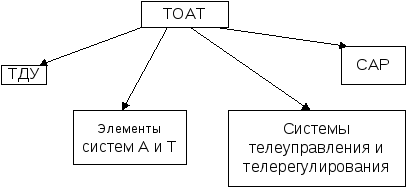
Структура систем управления, контроля и сигнализации примерно одинаковы и состоят из 3 основных звеньев (см. рис. 1): приемного, называемого обычно датчиком; промежуточного (преобразователя), преобразующего количественно или качественно энергию и передающего ее в третье звено – исполнительное.
![]() Рисунок
1
Рисунок
1
Датчик воспринимает внешнее воздействие и передает его в преобразованном виде на промежуточное звено. При автоматическом управлении на датчик оказывают воздействие внешние факторы. При контроле и сигнализации на датчик могут воздействовать как электрические, так и неэлектрические факторы, например: механические перемещения, их скорость, давление и температура и пр.
При управлении могут действовать автоматически те же факторы или может подаваться вручную начальный пусковой толчок. Передачи от звена к звену могут осуществляться различными видами энергии, но в настоящее время они производятся преимущественно электричеством. В дальнейшем мы будем рассматривать приборы и устройства преобразующие и передающие этот вид энергии.
Телемеханические системы по своим функциям аналогичны автоматическим, но всегда включают канал связи, по которому передаются воздействия.
Термин «телемеханика» происходит от 2 греческих слов: tele – расстояние, mechanica – механика. Термин был введен в 1905 году франц. ученым Бранли. Первоначально этот термин использовался для обозначения области науки и техники управления на расстоянии машинами и механизмами.
Телемеханика изучает процессы и методы автоматической передачи на расстояние команд управления и сообщений о состоянии объектов.
Применительно к авиации, ракетной технике и космическим кораблям телемеханика получила название телеметрия и радиоуправление.
Телемеханика применяется в первую очередь в тех отраслях, где нужно объединить территориально разобщенные объекты в единый производственный комплекс с централизованным управлением. Такие задачи возникают в энергосистемах, на нефтепромыслах, трубопроводах, крупных заводах, шахтах, транспорте, в ирригации и т.д.
Системы телемеханики совестно со средствами автоматики позволяют управлять на расстоянии машинами и установками без дежурного персонала на местных объектах и объединить их в единые производственные комплексы с централизованным управлением.
Частным случаем системы телемеханики является система телеконтроля, называемая также системой телеметрии, передающая информацию ТС и ТИ или только ТИ с объектов
управления. Функции управления на расстоянии в телеавтоматической системе выполняются частично или полностью управляющими устройствами.
Автоматическим управлением называется управление техническим объектом, осуществляемое без непосредственного участия человека. Роль человека при этом сводится к наблюдению за работай систем автоматического управления (САУ). К их включению или выключению. Если функции управления частично выполняет человек , то такие системы называются автоматизированными.
САУ состоит из управляемого (УО) и автоматического управляющего устройства (АУУ), взаимодействующих между собой. Управляемым объектом является устройство, осуществляющее некоторый технический процесс. Правильное выполнение этого процесса определяется совокупностью предписаний, называемой алгоритмом функционирования. Для выполнения алгоритма функционирования УО необходимо наличие специально организованных воздействий извне со стороны АУУ. Характер этих воздействий определяется совокупностью предписаний, которая называется алгоритмом управления.
Примером САУ служит система автоведения поезда, используемая в метрополитене. Управляемым объектом является поезд, который перевозит пассажиров и грузы. Алгоритм функционирования определяет движение поезда с данной скоростью, остановку его в определенных точках пути (на станциях) и обеспечение безопасности движения. Управление поездом для правильного выполнения им перевозочного процесса осуществляет устройство – «Автомашинист».
Каждая система АиТ состоит из отдельных элементов. Свойства системы, ее надежность и работоспособность, принципы построения и методы обслуживания зависят как от ее структуры, так и от изучения элементов, из которых состоят системы АтиС.
Элементом автоматики называется простейшее автоматическое устройство, которое преобразует входной сигнал в выходной сигнал.
Преобразование сигналов может быть количественным, качественным либо информационным.
При количественном преобразовании сигналы x и y имеют одинаковую размерность, но различаются по параметрам амплитуды, частоты, фазы и т.д. (усилители, трансформаторы, стабилизаторы и т.д.).
При качественном преобразовании меняется род энергии и сигналы x и y имеют отличную размерность (датчики, двигатели, генератор и т.д.). Информационное преобразование происходит тогда, когда на выходе элемента отражается некоторая информация о состоянии его выходов (логические элементы).
В зависимости от выполняемых функций элементы АиТ делят на измерительные, управляющие и исполнительные.
Независимо от принципа действия конструкции и природы физических процессов все элементы АиТ имеют общие характеристики, позволяющие сравнивать их друг с другом. К таким характеристикам относятся абсолютная и относительная погрешность.
Под абсолютной погрешностью понимается разность между фактической входной величиной и ее расчетным значением, т.е.. Абсолютная погрешность имеет размерность выходной величины.
Под относительной погрешностью понимают отношение абсолютной погрешности к рассчитанному значению выходной величины
Относительная погрешность – величина безразмерная и удобна для сравнения точности работы различных элементов.
Общей характеристикой элементов является их чувствительность (передаточный коэффициент).
В статическом режиме она определяется как отношение выходной величины к входной:
В динамическом режиме (дифференциальная чувствительность) ее определяют как отношение приращений входной и выходной величины:
Применительно к конкретным элементам, чувствительность часто имеет специальное название, например, коэффициент усиления, коэффициент трансформации.
Элементы,
имеющие обратные связи, характеризуются
также коэффициентом обратной связи
![]() ,
который показывает, какая часть выходной
величиныy
подается на вход элемента.
,
который показывает, какая часть выходной
величиныy
подается на вход элемента.
![]() Обратная
связь может быть положительной или
комплексной. Положительно обратная
связь обеспечивает увеличение общего
коэффициента передачи.
Обратная
связь может быть положительной или
комплексной. Положительно обратная
связь обеспечивает увеличение общего
коэффициента передачи.
Отрицательно
обратная связь позволяет стабилизировать
общий коэффициент передачи, т.е. ослабить
его зависимость от колебаний коэффициента
![]() основного элемента.
основного элемента.
Датчики (измерительные преобразователи).
Датчики являются приемными элементами систем АиТ и служат для преобразования управляющей физической величины, подаваемой на вход системы, в другую физическую величину иного или того же вида энергии, удобную для воздействия на последующие элементы системы.
В общем случае датчик состоит из трех основных частей: воспринимающей, промежуточной и исполнительной.
Воспринимающая часть реагирует на изменение определенной физической величины, поступающей на вход датчика, и передает ее в преобразованном виде на промежуточную часть. В промежуточной части преобразованная физическая величина сравнивается с аналогичным по роду физическим параметром, значение которого является эталоном для измерения воздействия на исполнительную часть датчика.
Датчики, которые содержат промежуточную часть, называются датчиками с промежуточным преобразованием. Такие датчики применяются в тех случаях, когда по физическим или техническим причинам управляющий параметр, подаваемый на вход, затруднительно или невозможно непосредственно преобразовать в требуемую физическую величину на выходе.
Эти датчики состоят из нескольких датчиков с непосредственным преобразованием, которые работают последовательно. При этом выходная величина одного датчика является выходной величиной следующего.
У датчиков с непосредственным преобразованием отсутствует промежуточная часть, а воспринимающая и исполнительная части составляют одно целое.
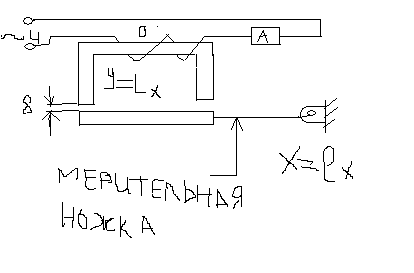
Так,
например, в датчике, измеряющем длину
детали, при изменении длины контролируемой
детали на величину x мерительная ножка
перемещается на величину
![]() ,
что изменяет воздушный зазор,
и индуктивность L
магнитной цепи. В Соответствии с этим
меняется величина тока в следующем
элементе А.
,
что изменяет воздушный зазор,
и индуктивность L
магнитной цепи. В Соответствии с этим
меняется величина тока в следующем
элементе А.
 Этот
датчик с непосредственным преобразованием
Этот
датчик с непосредственным преобразованием
Для преобразования напряжения в частоту может быть использован датчик с промежуточным преобразованием следующей структуры:

Напряжение U измеряется вольтметром V, стрелка которого связана с конденсатором переменной емкости. Конденсатор С включен в задающий контур генератора G, частота f на выходе которого зависит от емкости С. Таким образов происходит преобразование U Cf.
В зависимости от типа измеряемой величины датчики классифицируются следующим образом:
датчики электрических величин
тепловых величин
параметров измерений
давления
скоростей и ускорения
расходов
ориентации
угловых координат
звукового давления, звуковых колебаний
 Датчики 1 типа
фиксируют напряжение, силу тока, активные
сопротивления, индуктивности, емкости,
частоты, фазы, параметры диэлектрических
и ферромагнитных материалов, величины
магнитного потока.
Датчики 1 типа
фиксируют напряжение, силу тока, активные
сопротивления, индуктивности, емкости,
частоты, фазы, параметры диэлектрических
и ферромагнитных материалов, величины
магнитного потока.
Датчики 2 типа используются для определения температур
низких (термометры)
средних (термисторы, термопары)
высоких (спец термометры, оптические пирометры, радиолокационные пирометры, цветовые пирометры)
Датчики 3 типа используются для определения параметров потоков пучков заряженных частиц, плотности нейтронного потока, уровня - излучения, уровня напряженности магнитного поля .
Датчики 4 типа применяют при измерениях перемещения, нахождении линейных или угловых размеров, изготовлении или разбраковке деталей, определении скоростей и ускорений, уровней жидкости.
Датчики 5 типа строятся на основе применения мембран, тензометров, магнитоупругих элементов и используется при вычислении величин давления.
Датчики 6 типа подразделяются на объёмные и массовые.
К объёмным относятся тахометрические, ультразвуковые, индукционные и оптические датчики.
К массовым относятся те, в которых измеряемому веществу сообщается дополнительное движение. В них измеряется усилие от действия ускорения свободного падения или гироскопический эффект.
Датчики 7 типа измеряют углы и угловые скорости объектов в пространстве. Чувствительными элементами в таких датчиках являются разного рода гироскопы (с вращающимся ротором, камертопом, электровибраторами).
Датчики 8 типа позволяют определять узловые координаты и дальности движущихся объектов. Строятся они с применением радиолокационного, лазерного и оптоэлектронного преобразований.
В датчиках 9 типа для регистрации звуковых давлений и колебаний используются механические, электродинамические, пьезорезисторные элементы.
По форме выходного сигнала датчики бывают аналоговыми и дискретными.
В аналоговых датчиках, непрерывному изменению измеряемой координаты или процесса соответствует непрерывное изменение выходного сигнала датчика.
В дискретных датчиках выходной сигнал изменяется при превышении входной величины определенных пределов.
Простейшие датчики с непосредственным преобразованием входной величины в активное сопротивление R на выходе основаны на зависимости :
![]()
Существуют датчики, у которых под действием входной величины значение R на выходе изменяется за счет изменения трех физических величин правой части выражения.
Реостатные датчики.
Широко распространены реостатные датчики, которые преобразуют механические величины, в частности перемещения и удлинения, в изменении активных сопротивлений.
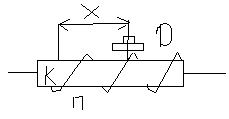
 В
датчике линейных перемещений с обмоткой
из однородной проволоки П одинакового
сечения, равномерно намотанной на
цилиндрический каркас К при перемещении
ползунка D
реостата на величину х пропорционально
перемещению задающего элемента (входной
величины) изменяется сопротивление R
реостата (выходная величина датчика),
которое включается во входную цепь
следующего элемента системы.
В
датчике линейных перемещений с обмоткой
из однородной проволоки П одинакового
сечения, равномерно намотанной на
цилиндрический каркас К при перемещении
ползунка D
реостата на величину х пропорционально
перемещению задающего элемента (входной
величины) изменяется сопротивление R
реостата (выходная величина датчика),
которое включается во входную цепь
следующего элемента системы.
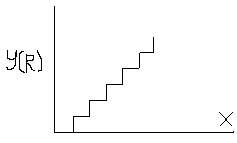
![]() Особенность
реостатного датчика – это дискретность
изменения выходной величиныR
в функции от перемещения ползунка х
или, иначе говоря, от входной величины
Особенность
реостатного датчика – это дискретность
изменения выходной величиныR
в функции от перемещения ползунка х
или, иначе говоря, от входной величины
![]() .
При перемещении ползунка реостата
значениеR
изменяется последовательными скачками
на величину сопротивления полного
витка.
.
При перемещении ползунка реостата
значениеR
изменяется последовательными скачками
на величину сопротивления полного
витка.
Скачкообразное изменение сопротивления датчика вызывает появление погрешности ступенчатости, которая определяется по формуле :
В%= 100/n, где n – число витков реостата в пределах всего расчетного диапазона изменения выходной величины.
Для снижения погрешности n берут равным нескольким сотням и даже тысячам.
При необходимости получить сложный закон изменения R в функции x применяют фигурные каркасы, сечения и материалы проводов на различных участках каркаса.
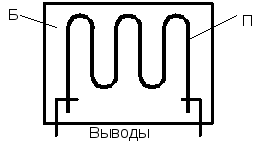
Для преобразования изменения удлинений и механических напряжнений в изменения активного сопротивления широкое применение находят проволочные датчики или иначе тензодатчики.
Тензодатчик состоит из проволоки П с высоким удельным сопротивлением, диаметром 0,02-0,05 мм, наклеенной на плотную бумагу Б в виде ряда петель длинной 10-25мм.
Д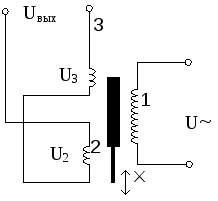 атчик
прочно наклеивается на деталь в
направлении ее удлинения. При деформации
испытуемой в месте и вдоль наклеенного
датчика одновременно меняется значенияL,
S
и
проволоки датчика, а следовательно,
будет изменяться и R.
При этом величина R/R
пропорциональна деформации на поверхности
детали.
атчик
прочно наклеивается на деталь в
направлении ее удлинения. При деформации
испытуемой в месте и вдоль наклеенного
датчика одновременно меняется значенияL,
S
и
проволоки датчика, а следовательно,
будет изменяться и R.
При этом величина R/R
пропорциональна деформации на поверхности
детали.
Ориентируя тензодатчики на поверхности детали различным образом можно определить не только величину деформации, но и ее направление.
Для преобразования световой энергии в активное сопротивление широко используются фотосопротивления. Освещение таких элементов как селен, сернистый свинец и фазонами лучистой энергии приводит к освобождению электронов из кристаллической решетки диэлектриков и полупроводников, что повышает их электропроводность.
Для непосредственного преобразования изменения температуры в изменение активного сопротивления применяются термодатчики с использованием зависимости сопротивления проводников и полупроводников от температуры. Наибольшее распространение получили термические датчики из полупроводников часто называемые термисторами. Термисторы отрицательным температурным коэффициентом, который по абсолютному значению в 10-20 раз больше аналогичного коэффициента чистых металлов. Эти датчики изготавливаются методом спекания порошковых металлов в твердую массу из закиси никеля в соединение с окислами марганца, смеси окислов марганца, никеля и кобальте.
Зависимость сопротивления термисторов RT от температуры в ее рабочем диапазоне выражается экспоненциальным законом:
где
![]() -удельное
сопротивление термистора,
-удельное
сопротивление термистора,
и В – постоянные, зависящие от физических свойств материала термистора,
Т- температура в градусах абсолютной шкалы.
Термисторы также используются в качестве датчиков скорости течения жидкостей и газов, лучистой энергии и др.
Датчики
с изменяющейся на выходе величиной
индуктивности могут применяться лишь
с питанием от переменного тока. В этой
группе датчиков изменяющимся параметром
на выходе является индуктивное
сопротивление
![]() .
.
Индуктивные датчики широко используются для преобразования небольших изменения линейных размеров, медленных перемещений, деформаций и усилий. Простейший датчик этой группы рассматривался нами ранее (первый рисунок). Этот датчик не получил распространения ввиду действия на якорь силы притяжения при протекании тока по обмотке датчика. Кроме того, на его работу оказывает сильное влияние колебания величины и частоты напряжения.
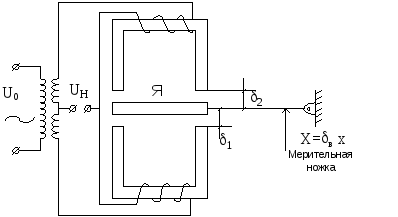
Чаще применяется индуктивный датчик с двумя дросселями, включаемыми по мостовой или дифференциальной схеме(см. рисунок ниже).
При
среднем положении якоря, когда 1=2,
выходное напряжение Uн
=0. Если якорь Я отклоняется от среднего
положения вниз, то 1<2,
а
![]() >
>![]() и появится выходное напряжениеUн
тем большее, чем большее отклонение
якоря от среднего положения.
и появится выходное напряжениеUн
тем большее, чем большее отклонение
якоря от среднего положения.
Дифференциальный датчик имеет вдвое большую чувствительность и значительно меньшую погрешность, чем простой индуктивный датчик.
Индуктивные датчики применяются также для преобразования усилий. У таких датчиков используется зависимость магнитной проницаемости ферромагнитных материалов от величины механических напряжений в них (магнитоупругий эффект).
Конструктивно датчики м.б. выполнены с поворотным якорем, с прямоходовым якорем и соленоидного типа.
Датчик соленоидного типа.
При необходимости фиксация значительных прямоугольных перемещений применяются датчики соленоидного типа, соединенные по дифференциальной схеме.
Дифференциальная схема
соленоидного датчика.
Дифференциальная система включения датчика уменьшает действующее на якорь усилие и устраняет влияние температуры вследствие того, что одновременное изменение сопротивления обмоток, расположенных в двух соседних плечах схемы, не вызывает его дисбаланса.
Величины, связывающие выходное напряжение с параметрами мостовой схемы, связаны между собой следующим соотношением:
![]()
где -изменение полного сопротивления одной половины обмотки при перемещении сердечника от среднего положения;
Z - полное сопротивление обмотки датчика.
![]()
Датчик позволяет фиксировать правостороннее перемещение сердечника по отношению к среднему положению.
Ток, протекающий по сопротивлению нагрузки будет:

При
выборе параметров датчика и сопротивления
нагрузки следует стремиться к выполнению
условия
![]() ZHZ
по крайней мере в 5 раз.
ZHZ
по крайней мере в 5 раз.
Конструктивной разновидностью индуктивных датчиков, являются трансформаторные датчики, широко применяемые в устройствах промышленной автоматики.
Трансформаторный датчик имеет три обмотки. Одна из них – первичная, получает питание от источника тока. Две другие 2-я и 3-я обмотки соединены встречно и имеют одинаковые параметры и на их выходных клеммах измеряется напряжение, пропорциональное перемещению сердечника Х.
При среднем положении сердечника наводимые в катушках 2 и 3 ЭДС равны, 2 т.к. они направлены встречно, то Uвых = 0.
Напряжение на выходе появляется лишь при отклонении сердечника от среднего положения и определяется разностью между ЭДС 2-й и 3-й обмоток.
U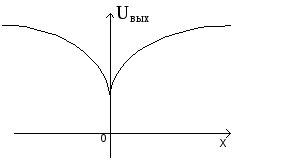 вых=U2-U3
вых=U2-U3
Линейность характеристики индуктивного датчика сохраняется только на некотором участке и нарушается в том случае, когда активное сопротивление становится соизмеримым по величине с индуктивным.
Преимущества индуктивных датчиков:
отсутствие контактных соединений;
высокая чувствительность;
незначительная погрешность от изменения температуры и амплитуды питающего напряжения.
Недостатки:
сравнительно большие массогабаритные показатели;
зависимость характеристики от частоты питающего напряжения f=50 Гц5кГц.
Практическая точность индуктивных датчиков может достигать пределов от 0,1 до 1,5%.
В настоящее время разработчики занимаются лишь выбором необходимых датчиков.
При проектировании систем автоматики выбор датчиков осуществляется по следующим параметрам:
-величина перемещения сердечника;
-усилие, действующее на сердечник;
-требуемая чувствительность;
-характер и величина нагрузки;
-параметры питающего и выходного напряжения.
Емкостные датчики.
У емкостных датчиков входной величиной является линейное или угловое перемещение, а выходной – изменение электрической емкости под действием этого перемещения.
Для датчиков линейного перемещения входной величиной является перемещение Х.
![]()
Для датчиков углового перемещения – входной величиной является угол поворота.
![]()
Выходной величиной для обоих типов датчиков является изменение эл. емкости.
Находят также применение емкостные датчики цилиндрической формы ( соленоидного типа).
Для датчиков с прямоугольными пластинами конденсатора, регистрирующими линейные перемещения, выражение для чувствительности можно получить из формулы для емкости плоского конденсатора:
![]() где
где
![]() -
диэлектрическая проницаемость среды,
-
диэлектрическая проницаемость среды,
S – активная площадь конденсатора (площадь пластин).
При этом чувствительность равна:
![]()
Выражение для чувствительности емкостного датчика с угловым перемещением можно получить на основе формулы:
![]() где
S
- активная площадь конденсатора при
=0
где
S
- активная площадь конденсатора при
=0
d – расстояние между подвижными и неподвижными пластинами.
Тогда чувствительность:
![]()
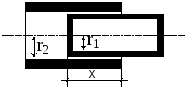
Емкость датчика соленоидного типа:
 где
х – величина перекрытия внутреннего
цилиндра наружным;
где
х – величина перекрытия внутреннего
цилиндра наружным;
r1 – радиус внутреннего цилиндра;
r2 – радиус внешнего цилиндра.
Чувствительность:
Использование емкостных датчиков при частоте питающего напряжения 50Гц и менее невозможно без применения специальных усилителей, т.к. они в этом случае представляют большое сопротивление.
Поэтому такие датчики используются на высоких частотах – 2, 14, 120 кГц.
Недостатки емкостных датчиков:
1. Необходимость усиления выходного сигнала;
2. Большое влияние паразитных емкостей соединительных проводов и монтажа;
3. Потребность в источнике питания специальной формы.
Применение.
Кроме фиксации линейных и угловых перемещений емкостные датчики применяются для контроля местонахождения объектов, охраны помещений, определения линейных размеров при контроле деталей.
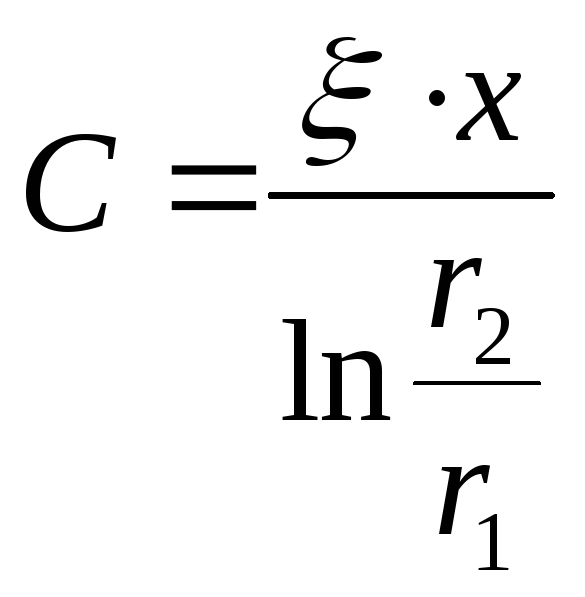
Одним из емкостных принципов преобразования является также пьезоэлектрический эффект, при котором изменение измеряемой величины превращается в изменение электростатического заряда или напряжения, возникающих в некоторых материалах при их механическом напряжении. Напряжение образуется под действием сил сжатия, растяжения или изгиба, которые являются измеряемой, величиной и воздействует на чувствительный элемент.
В качестве пьезоэлектрического материала, применяемого в конструкции такого преобразователя:
1.природные кристаллы, такие как кварц.
2.синтетические кристаллы (сульфат натрия).
3.поляризованная ферромагнитная керамика.
Ионизационные преобразователи.
Ионизационные датчики превращают изменения измеряемой
величины в измерения тока ионизации, который протекает между двумя электродами.

Типичный пример использования, ионизационного принципа -
прибор для измерения кислотности раствора определяется
концентрацией в нем положительно заряженных ионов водорода,
называемой водородным потенциалом pH.
Причем pH= - log10[H]
где [H] - концентрация ионов водорода в граммах на литр.
Значение pH=0 для кислотного раствора.
pH=7 для нейтрального раствора (чистой воды).
pH=14 для чистого щелочного раствора.
Фотоэлектрические датчики.
Реагируют на электромагнитное излучения, падающее на поверхность
преобразующего элемента.

Фотопроводящее Солнечный
преобразование. элемент.
У ФОТОСОПРОТИВЛЕНИЙ сопротивление является обратной функцией интенсивности облучения. Значение сопротивления при полном облучении = 100-200 Ом, и в полной темноте десятки Ом.
Для изготовления фоторезисторов используется сульфид калия или
селенит калия.
СОЛНЕЧНЫЕ ЭЛЕМЕНТЫ превращают излучаемую эл. маг. ЭНЕРГИЮ
В ЭЛЕКТРИЧЕСКУЮ, Т.Е. В ИЗМЕНЕНИЕ НАПРЯЖЕНИЯ.
Конструкция преобразователя включает в себя слой фоточувствительного высокоомного материала, размещенного между двумя проводящими электродами. Один из электродов выполнен из прозрачного материала, через который проходит излучения и попадает на фоточувствительный материала. При полном освещении один элемент вырабатывает выходное напряжение между электродами =0.5 В.
ФОТОДЕКТОРЫ.
Предназначены для фиксации изменений параметров светового излучения (фотодиоды, фототранзисторы, PIN-диоды)
В фотодиодах используется эффект облучения p-n перехода с отрицательным смещением. При наличии облучения изменяется ток, протекающий через переход. Реакция=1-5 нС.
PIN-диоды – фотодиоды в которых между слоями p-n.
n-типа имеется слой беспримесных полупроводника что повышает чувствительность к световому излучению и уменьшает емкость перехода, следовательно более быстрая реакция на изменения уровня облучения.
В ФОТОТРАНЗИСТАРАХ – свет, падающий на переход коллектор - базы, вызывает в базе фототок, который усиливается с коэффициентом усиления.
Транзистора, что ведет к большому току эмиттера.
При этом ток эмиттера
IE = (1+hFE) IF
где hEF –коэффициент усиления транзистора по постоянному току.
IF - фототок базы.
Для достижения более высокого усиления используют фотодетекторы Дарлингтона, содержащие в себе фототранзистор и транзистор с высоким коэффициентом усиления.
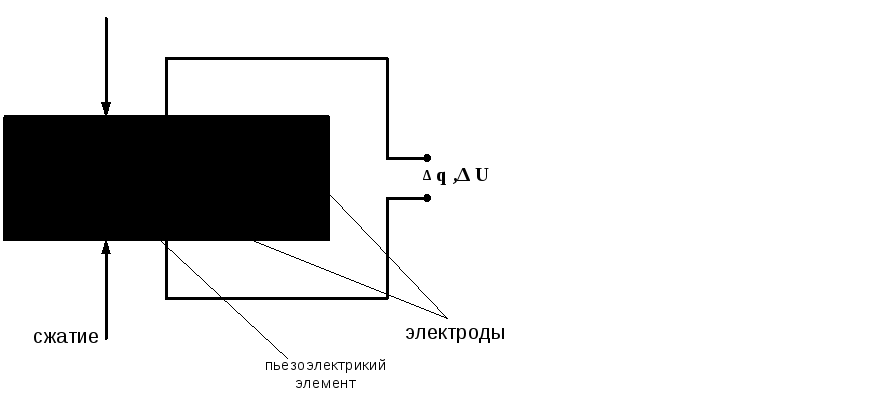
ДАТЧИК ХОЛЛА.
Когда проводник с протекающим по нему током помещается в магнитное поле так, что направление тока оказывается перпендикулярным магнитным силовым линиям, то образуется поперечное электрическое поле, пропорциональное произведению плотности магнитного потока и силы электрического тока.
Величина этого электрического поля.
E= - RH ( I B ) ,
где RH = 1/ne –коэффициент Холла
n e –число зарядов, протекающих через единицу объема и образующих электроток в проводнике или полупроводника;
e – заряд носителя зарядов.
Датчики Холла используются для измерения магнитного поля, и также в бесконтактных переключающих приборах.
ТЕРМОЭЛЕКТРИЧЕСКИЕ ПРЕОБРОЗОВАТЕЛИ
(ТЕРМОПАРЫ).
Превращают измерения температуры в изменение тока, возникающего вследствие разности температуры на спае двух разнородных материалов в которых возникает эффект Зеебека
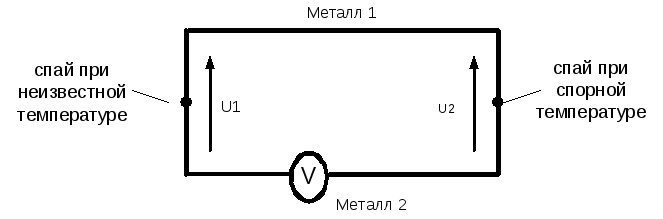
Принцип действия
термопары.
Разность потенциалов U = U1 – U2, которая образуется на двух спаях (контактные потенциалы), зависят от температуры спая, и измеряется вольтметром. Таким образом, показания вольтметра отображают разность температур между спаями.
Спай, температуру которого надо изменять, называется чувствительным.
Другой спай (опорный) обычно находится при заранее известной температуре (H – p, 0 C) .
Термопары изготовляются обычно виде зонта, в котором чувствительный элемент содержит две проволочки из термопарных материалов, спаянных вместе на тонком кончике спаянных проволочек м. б. помещают в среду, температура которой измеряется.
РАДИАЦИОННЫЕ ПИРОМЕТРЫ.
Радиационная пирометрия – изменение температуры тела без непосредственного контакта с ним, т. е. с использованием энергии излучения нагретого тела.
В общем случае пирометр состоит из:
1.совокупности оптических линз для фокусировки энергии излучения на преобразующем элементе;
2.преобразующего элемента для восприятия энергии излучения;
3.электронных схем для сопряжения преобразующего элемента с последующими блоками.
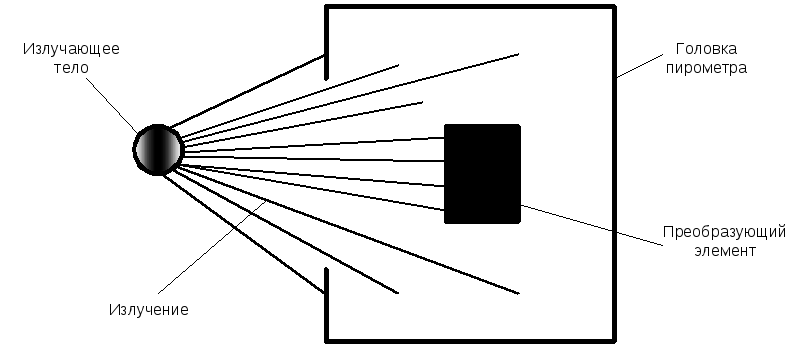
Принцип действия пирометра.
Преобразующий элемент пирометр выполнен в виде термопар на основе резистивных чувствительных элементов – болометров.
Пирометры могут также использоваться для обнаружения разных тел.
ДИСКРЕТННЫЕ ПРЕБРОЗОВАТЕЛИ ПЕРЕМЕЩЕНИЙ.
Линейные перемещения воспринимаются линейным, а угловые – угловым или поворотным кодирующим устройством.
Основные типы преобразователей имеют в своем составе движущийся диск или полоску определенного рода с большим количеством дорожек, которые сканируются
– щеткой.
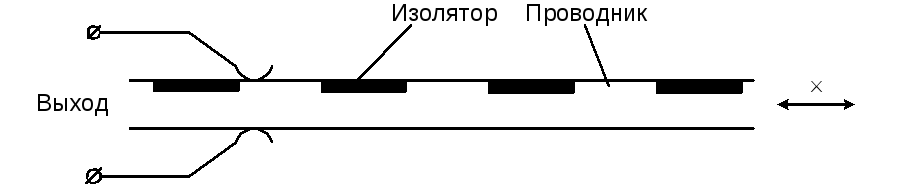
- световым лучом.
-магнитной катушкой
![]()
Щеточные кодеры не нашли широкого применения, из-за ограниченного срока службы (тренье, загрязнения).
В магнитном кодере зондирующий сигнал (обычно импульсный f = 200 кГц или ’’1’’) прикладывается к входной катушке. Поэтому, когда головка проходит над участком с основным материалом (немагнитным), на выходной катушке появляется импульсный сигнал.
Если головка находится на намагниченном участке – сигнал не образуется.
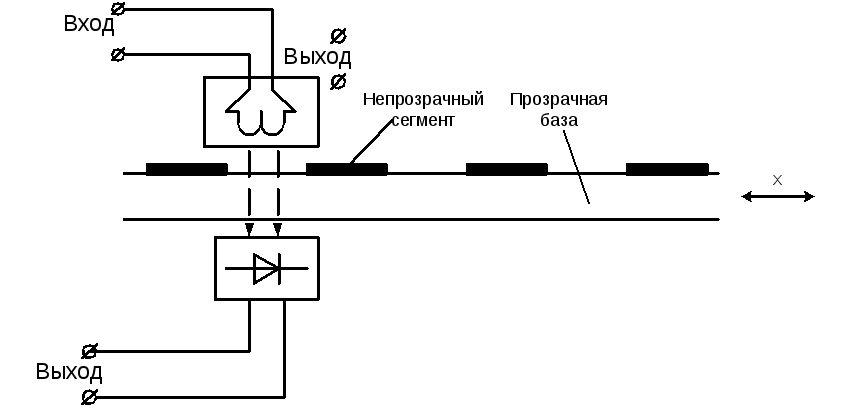
На практике используются 2 типа кодеров: шифраторы приращения и абсолютные шифраторы.
Шифраторы приращения генерируют выходные импульсы, которые подсчитываются реверсивным счетчиком, поэтому его показания соответствуют тому, как далеко диск или полоска продвинулись с начала счета.
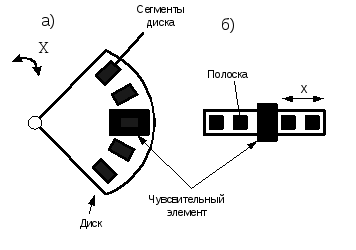
а) угловой шифратор б) линейный шифратор
Здесь в основном применяются 2 чувствительных элемента, расположенных в датчике так, что их выходы сдвинуты относительно друг друга на 90 градусов по фазе.
Разрешающая способность такого шифратора зависит от количества чувствительных сегментов на диске или полоске преобразователя. Поэтому существует механический предел их чувствительности.
ИЗМЕРЕНИЯ ЗВУКА.
Основной измеряемой величиной в акустике является звук, и звуковое давление.
В воздухе звук представляет собой простое скопление волн давления, перемещающихся со скоростью = 322 м/c (над уровнем моря). Эти волны действуют в любой точке пространства как колебания давления воздуха.
Воздух – это упругая среда. Звук может распространяться в любой другой упругой среде, но в этих случаях он будет представлять собой не колебания давления, а колебания отдельных частиц напряжения или плотности. Они имеют различную скорость прохождения в различных средах.
Измерения звука в воздухе выполняются с использованием преобразователей давления с частотными характеристиками, подобными характеристике человеческого уха. Такие приборы называют микрофонами.
Уровень звукового давления определяется
Р зд =20 log10 Дэф / Доп
где Дэф – эффективное давление звука.
Доп – опорное давление звука.
Измерения уровня звукового давления включают в себя непосредственно определение давления на всех частотах звука, поэтому указанные уровни давления точно известны на этих частотах.
Измерители громкости звука и звукового давления выполняется в виде единого переносного блока, содержащего в себе схему, предусилитель и дисплей.
Наиболее распространенными типами микрофонов, используемых при звуковых измерениях, являются кристаллические (работающие на пьезоэлектрическом эффекте) и конденсаторные (работающие на емкостном эффекте) микрофоны.
ДАТЧИКИ, ИСПОЛЬЗУЕМЫЕ В УСТРОЙСТВАХ ЖАТС.
Широко распространены в системах ЖАТС датчики проследования подвижного состава, называемые рельсовыми педалями.
Воздушно–мембранную педаль устанавливают под рельсом. Эта педаль реагирует на изгиб рельса при прохождении подвижного состава.
Для переключения контакта педали достаточен прогиб рельса 0,015 мм.
Через контакт педали включают педальное реле.
Просадочная саморегулирующая педаль ПСП реагирует на просадку рельса при прохождении подвижного составе.
Воздушно–мембранная и рельсовая просадочная педали не используются в новых СЖАТ.
Бесконтактная магнитная педали ПБМ–56 по принципу действия является бесконтактным индуктивным датчиком и содержит сердечник из постоянного магнита с разомкнутой цепью и обмотку, насаженную на сердечник.
![]()
Педаль прикрепляется к рельсе с внутренней стороны коли на 15 мм ниже уровня головки рельсы.
При приближении подвижной единицы (колеса) в педали уменьшается (шунтируется) воздушный зазор магнитной цепи, вследствие чего изменяется (возрастает) магнитный поток в сердечнике. При этом в обмотке индуцируется Э.Д.С., амплитуда и длительность которой зависит от расстояния между колесами и датчиком и скорости прохождения колеса над датчиком.
Когда колесо вагона удаляется от педали, снова изменяется магнитный поток
( уменьшается) и в обмотке появляется импульс Э.Д.С. другой полярности. Импульсы Э.Д.С. получающиеся на выходе ПБМ-56, могут непосредственно управлять работой чувствительного быстродействующего поляризованного реле РП типа РП17. Однако реле реагирует лишь на импульсы, получающиеся при скоростях 1-30 км/ч, т.к. при скоростях <1 км/ч амплитуда импульса мала для срабатывания реле, а при скоростях > 30 км/ч длительность импульса дольше времени срабатывания реле.
Для обеспечения надежной фиксации проследования подвижного состава при скоростях до 200 км/ч на выходе датчика ПБМ-56 включают усилительную полупроводниковую приставку.
Трансформаторно-компенсационная педаль ТКП предназначена для работы на сортировочных горках.
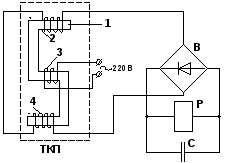
Основным элементом КТП является дифференциальный измерительный трансформатор с S-образным сердечником 1, на котором закреплена питающая обмотка 3 , соединенная с источником ~ тока 220В 50 Гц, сигнальная обмотка 2 и компенсационная обмотка 4, включенная встречно сигнальной.
Педаль ТКП устанавливают внутри колеи так, чтобы стержень магнитопровода с сигнальной обмоткой 2 был обращен к рельсу.
При отсутствии колеса в зоне действия педали переменный магнитный поток, создаваемым питающей обмоткой 3, индуцирует в сигнальной и компенсационной обмотках одинаковые ЭДС.
На выходе педали ЭДС отсутствует, т. к. эти обмотки включены встречно.
При прохождении колеса около педали возрастает магнитный поток и ЭДС у сигнальной обмотки вследствие уменьшения воздушного зазора, а у компенсационной обмотки магнитный поток и ЭДС несколько уменьшатся. На выходе педали появляется напряжение, от которого срабатывает приемное устройство.
В большинстве случаев в кач-ве приемника используют реле Р с выпрямителем В и сглаживающим конд-м С.
Педаль ТКП может работать в сочетании с электронно-релейным приёмником.
Для контроля свободности участков пути от подвижного состава используются рельсовые цепи РЦ образуются путем электрической изоляции контролируемого участка с помощью изолирующих стыков ИС. На одном конце РЦ к рельсам подключается питание, а на другом – контролируемый прибор КП (реле), реагирующий на ток в рельсах, которые используются как проводники.
![]()
Если участок свободен, то через КП протекает ток большого значения (якорь реле притянут ). При занятии участка хотя бы одной колесной парой, сопротивление которой (<= 0.06 Ом) во много раз меняется сопротивление КП, ток в последнем резко уменьшается (реле отпускает якорь) . Т.е. по состоянию КП можно судить о свободности или занятости участка пути.
В радиолокационном измерителе скорости, применяемом в системе АРС на сортировочных горках, действие датчика скорости основано на использовании эффекта Доплера. Этот эффект заключается в том, что сигнал в виде электромагнитной волны, отраженный от движущегося объекта, изменяет свою частоту пропорционально скорости движения объекта. Таким образом, механическая величина перемещения преобразуется в изменение частоты электрического сигнала.
Для определения скорости отцепа на сортировочной горке устанавливают передатчик высокочастотных колебаний (с длиной волны несколько миллиметров или сантиметров). С помощью специальной антенны эти электромагнитные колебания направляют острым пучком вслед движущемуся отцепу. Отраженный луч воспринимается приемной антенной. Частота отраженного сигнала отличается от передаваемого на значение Δf , пропорциональное скорости движения отцепа.