

Распределители: назначение и классификация.
Распределители преобразуют параллельные во времени импульсы тока в последовательные (рис. 13.5,а) и наоборот. В последнем случае временную последовательность импульсов можно преобразовать в пространственную (рис. 13.5,6) или пространственно-временную (рис. 13.5,в).
В зависимости от времени перехода распределителя с одной позиции в другую различают распределители с прямым, обратным и двойным ходом. В распределителях с прямым ходом переход с одной позиции в другую происходит при поступлении импульсов, в распределителях с обратным ходом — при интервалах, в распределителях с двойным ходом — при поступлении импульсов и в интервалах.
По характеру работы распределители разделяют на непрерывные и стартстопные. Непрерывные распределители работают независимо от наличия или отсутствия передачи. Стартстопные распределители работают при возникновении передачи и останавливаются по ее прекращении.

Распределительная селекция.
Для уменьшения числа каналов связи в железнодорожных системах телемеханики широко применяют временное разделение сигналов (импульсов). При этом используют следующие виды селекции (из-бирания): распределительную, кодовую (комбинаторную) и кодово-распределительную (смешанную).
При распределительной селекции на распределительном (РП) и исполнительном (ИП) пунктах устанавливают синхронно и синфазно работающие распределители (рис. 11.10). Это позволяет один и тот же канал связи использовать для последовательной во времени передачи приказов нескольким объектам. За полный цикл работы распределителей в канал связи поочередно посылают приказы каждому управляемому объекту, содержание которых определяет положение соответствующих управляющих рукояток.
Так, если при нахождении щеток распределителей РП и ИП на первой ламели управляющая рукоятка Р1 повернута вправо (замкнут ее правый контакт), то через обмотку исполнительного реле И1 в этот момент протекает ток прямого направления. Реле И1 срабатывает и своим контактом замыкает левую исполнительную цепь первого объекта. Если при нахождении щеток распределителя на первой ламели управляющая рукоятка Р1 повернута влево (замкнут ее левый контакт), то через обмотку
исполнительного реле И1 протекает ток противоположного направления. Контакт этого реле замыкает правую исполнительную цепь первого объекта.
При нахождении щеток распределителей на второй ламели в канале связи посылается импульс тока, характер которого определяет положение управляющей рукоятки Р2. На исполнительном пункте импульс воспринимает реле И2 и обеспечивает передачу приказа второму объекту. При нахождении щеток обоих распределителей на третьей ламели осуществляется передача приказа третьему объекту и т. д. За полный цикл переключения щеток распределителей каждый управляемый объект получает приказ, содержание которого определяет положение соответствующей ему управляющей рукоятки. Таким образом, при распределительной селекции имеет место циркулярная передача приказов всем управляемым объектам, которая происходит следовательно во времени.

Рис. 11.10. Схема распределительной селекции
Режимы работы контактов реле
Условия работы контактов в режиме замыкания и размыкания электрической цепи различны.
При замкнутых контактах поверхности соприкосновения прижимаются друг к другу с усилием Р„, называемым контактным нажатием. Поверхность соприкосновения состоит из выступов и впадин, поэтому касание происходит лишь в отдельных точках (рис. 2.8, в поз. 5). Под действием сил Рк происходит смятие материала. При увеличении нажатия число точек касания увеличивается, а переходное сопротивление контакта /?„ уменьшается.
Наличие пыли, посторонних частиц, пленок окисей увеличивает сопротивление Ro. Для создания надежного контакта необходимо окислы, поэтому контакт тем лучше, чем больше давление Рк и чище поверхность.
Процессы з а м ы к а ни я контактов, если они происходят без дребезга, характеризуются наличием автоэлектронной эмиссии электрона с поверхности катода, возникающей от большого градиента напряжение в момент приближения контактов друг к другу на расстояние порядка 10~5 см. Эмиссия вызывает искру, которая в другие формы газового разряда не развивается, так как в следующий момент времени контакты замыкаются. При наличии вибрации после первого замыкания возникает дуга. При больших токах и малых расстояниях разрушение дугой в момент включения может быть больше, чем при размыкании контактов. Наибольшее разрушение контакта возникает в процессе размыкания тока от эрозии под действием искры (самопогасающей дуги).
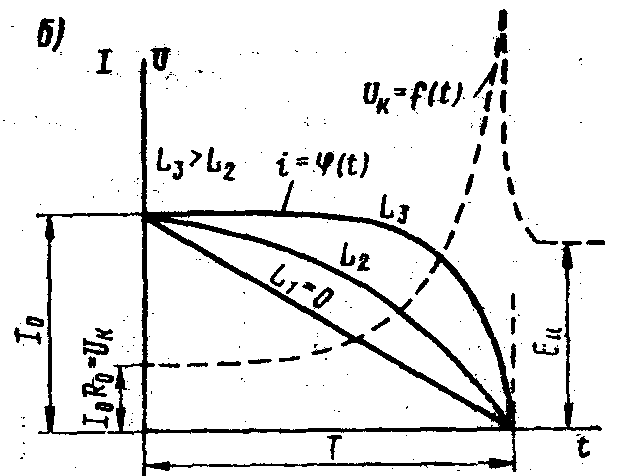
Режим размыкания цепи характеризуется изменением переходного сопротивления контакта от R0 до R0.=∞. При равномерном движении контактных пружин площадь соприкосновения поверхностей s меняется по закону
s = S0 (1-t/T)
Т — время полного размыкания контактов; t — текущая координата времени; So — полная начальная площадь соприкосновения (рис.2.9. а).
Переходное сопротивление в месте соприкосновения контактов меняется так же, как функция от времени t, по закону
Rk = R0 / (1 – t/T) →∞
R0 – переходное сопротивление замкнутых контактов.
Определим условие надежного размыкания цепи с индуктивностью и сопротивлением. В такой цепи имеют место уравнительные токи, создаваемые магнитной энергией I2L/2. Поэтому на контактах возникает напряжение Uk превышающее напряжение источника тока Ец тем больше, чем больше L (рис. 2.9, б).
Под действием высокого напряжения UK слой воздуха пробивается, и в нем устанавливается искровой разряд или дуга, при этом время выключения управляемой цепи возрастает, так как дуга поддерживает токопрохождение и после размыкания контакта. Особенно опасна устойчивая дуга, при которой развивается большая температура 3000—5000 °С. Поэтому контакты надежно работают, если выполняется условие погасания дуги.


Реле переменного тока. Индукционные двухэлементные реле.
Реле переменного тока непосредственного действия имеют П-образный магнитопровод, который для уменьшения потерь на гистерезис и вихревые токи собирают из листовой трансформаторной стали. На одном стержне магнитной цепи помещается обмотка реле 3 (рис. 6.2, а и б). Якорь реле 4 утяжелен, а сердечник / разделен на две части. На одну часть сердечника надевается небольшое медное кольцо 2, которое надежно устраняет вибрацию якоря.
К реле этого типа относится реле API (аварийное реле), используемое в устройствах автоблокировки и электрической централизации.
При расчете реле переменного тока необходимо учитывать потери на вихревые токи и гистерезис, так как часть намагничивающего тока идет на покрытие этих потерь.
Другой особенностью реле переменного тока является зависимость намагничивающего тока от индуктивности, которая в свою очередь меняется с изменением зазора δ, т. е.
![]()
![]()
У реле постоянного тока при заданном напряжении U намагничивающий ток.в обмотке определяется как I = U/R. В силу, этого тяговые характеристики реле переменного и постоянного тока значительно отличаются одна от другой.

Рис. 6.2. Реле переменного тока с раздвоенным полюсом
Индукционные двухэлементные реле переменного тока применяют в качестве путевых реле в рельсовых цепях переменного тока на электрифицированных участках железных дорог, в метрополитенах и на дорогах с автономной тягой.
Принцип действия двухэлементных индукционных реле основан на взаимодействии переменного магнитного потока Ф1 одной магнитной цепи с током, индуктированным в проводнике переменным потоком Фг Другой цепи.
Проводник, в котором индуктируется ток, может иметь форму рамки, диска, сектора или цилиндра.
На
транспорте применяют реле типов ДСШ и
ДСР (двухэлементные секторы
реле) с двумя электромагнитами. Обмотки,
создающие потоки Ф1
и Ф2,
питаются переменным током от двух
напряжений, сдвинутых
по фазе на угол ф. В соответствии с этим
![]()
![]()
Каждый
поток создает в екторе э. д. с. и вихревые
токи:![]()
![]()
Сельсины и СКВТ.
 В
индукционных системах синхронной связи
используют взаимно связанные асинхронные
машины переменного тока. Применение
последних
для целей синхронной связи позволило
получить в этих системах
весьма ценное свойство — способность
к самосинхронизации, т.
е. способность их самостоятельно
устанавливаться синфазно. По этой
причине индукционные машины, используемые
в синхронной связи,
носят название сельсинов.
Как и другие системы синхронной
связи, индукционные системы имеют датчик
и приемник, причем конструкция
их выполняется одинаково.
В
индукционных системах синхронной связи
используют взаимно связанные асинхронные
машины переменного тока. Применение
последних
для целей синхронной связи позволило
получить в этих системах
весьма ценное свойство — способность
к самосинхронизации, т.
е. способность их самостоятельно
устанавливаться синфазно. По этой
причине индукционные машины, используемые
в синхронной связи,
носят название сельсинов.
Как и другие системы синхронной
связи, индукционные системы имеют датчик
и приемник, причем конструкция
их выполняется одинаково.
Индукционные системы выполняют: 1) с однофазными обмотками ротора и статора; 2) с трехфазными обмотками ротора и статора; 3) с одной однофазной и одной трехфазной обмотками.
![]()
![]()

Рисунок1-Сельсины.
СКВТ-синусо-косинусный вращающийся трансформатор.
![]()
![]()

Рисунок2- СКВТ.
Сменно-качественый код.
Сменно-качественные коды. Как уже отмечалось, наличие в коде разделительных интервалов увеличивает время передачи приказов. Для уменьшения этого времени применяют сменно-качественные коды, у которых все соседние импульсы имеют качественные отличия. В системе с полярными качествами при таком построении кода за каждым положительным импульсом следует отрицательный или наоборот. В качестве третьего признака при этом используют бестоковые импульсы (разделительные интервалы). При частотных признаках за импульсом одной частоты следует импульс другой частоты и т. д. При сменно-качественных кодах интервалы между импульсами можно резко уменьшить и сократить этим время передачи приказов.
При сменно-качественных кодах k признаков может принимать только первый импульс. Все последующие п — 1 импульсы могут иметь лишь k — 1 признаков. Поэтому общее число приказов при сменно-качественных кодах
N=k(k—1)(k—1)... (k-1)=k(k-1)n-y.
(n — 1) раз
Применение сменно-качественных кодов возможно лишь при k > 2, т. е. эти коды не относятся к двоичным кодам. Если принять, что k = 2, то N = k (k-1)n-1 = 2 • 1n-1 = 2, т. е. построение системы становится невозможным. В сменно-качественных кодах обнаруживаются лишь те ошибки, при наличии которых соседние импульсы кодовой комбинации получают одинаковое значение.
Тяговая и механическая характеристики реле.
Механическая характеристика – это зависимость механических усилий, преодолеваемых при перемещении якоря от значения входа якоря.
Рис. 1, Механические характеристики реле
fm = φ(δ)
Механическая характеристика может быть измерена усилием fm на якорь в различном его положении.
Механическая
характеристика необходима для расчётов
параметров самого реле. Тяговое усилие
- fЭ.
![]()
IW – магнитодвижущая сила [A],
δ,S – зазор и площадь сечения возд. зазора.
Тяговой характеристикой называют зависимость электромагнитного усиления от воздушного зазора между якорем и сердечником.
Условие притяжения: fЭ > fm.
Условные обозначения реле и их контактов на схемах. Маркировка реле.
Для краткости обозначения типов реле железнодорожной автоматики приняты следующие условные обозначения (шифр) типов реле. Это обозначение состоит из нескольких букв и цифр, означающих (первая буква шифра): Н — нейтральное реле нормального действия; И — импульсное; К — комбинированное; П — поляризованное; О — огневое; Т — трансмиттерное; ДС — двухэлементное секторное; АН — автоблокировочное нейтральное и т. д. Буква на втором месте шифра: М — малогабаритное; третья и следующие буквы: Ш — штепсельное; В—с выпрямительным элементом; МТ — медленнодействующее с термическим (биметаллическим) элементом и т. д. Повторяющиеся буквы означают: П — пусковое; М — медленнодействующее.
Цифра после букв у нейтральных реле характеризует постоянный набор контактных групп: 1 — восемь переключающих контактов (8 фт); 2 — четыре переключающих контакта (4 фт); 3 — два переключающих и два замыкающих (2 фт, 2 ф); 4 — четыре переключающих и 4 замыкающих (4фт, 4 ф); 5 — два переключающих и два размыкающих (2 фт, 2 т).
Следующие цифры после тире обозначают значения сопротивления обмоток в омах. Если реле имеет две обмотки с разным сопротивлением, то цифры стоят в виде дроби.


Характеристики систем автоматического управления и регулирования.
Передаточная функция записывается в операторном виде W(p) = Y(p)/X(p)
Преобразование Лапласа
![]() jω→p
jω→p

Весовая функция – реакция звена или системы на единичный импульс, является производной от единичной ступенчатой функции. x(t) = δ(t) = (1(t))’

Частотными характеристиками наз. Формулы и графики, характеризующие реакцию системы на синусоидальное входное воздействие. x(t) = sin ωt, то на выходе системы в установившемся режиме получим y(t) = A(ω) sin (ωt+φ(ω))
A(ω) = [W(jω)] – амплитудо-частотная хар-ка
φ(ω) = arg[W(jω)] –фазо-частотная хар-ка

Частотные и фазовые импульсные признаки телемеханических сигналов.
Частотные признаки (рис. 11.3, в). Импульсы при частотных признаках различаются частотой синусоидальных колебаний. Генерирование частотных импульсов осуществляют генераторами частоты, дешифрацию — реле и схемами с использованием электромеханического или электрического резонанса.
В частотных каналах связи несущую частоту модулируют частотой, определяющей характер передаваемого приказа. Частотные признаки дают возможность использовать большое число признаков (частот) и допускать одновременную передачу нескольких частот и, следовательно, нескольких приказов. Частотные признаки относят к неперекрываемым признакам, у которых возможность искажения приказов при их передаче маловероятна.
![]()
Фазовые признаки (рис. 11.3, г). Импульсы при фазовых при-'J знаках различают фазами тока. Чтобы не усложнять аппаратуру и? обеспечить достаточную надежность действия, используют чаще все два фазовых признака (в качестве второго признака используют сдвиг фаз на 180°. Фазовые признаки можно использовать при различных методах селекции: и любых каналах связи. Они мало подвержены искажениям, и их относят к неперекрываемым признакам.
![]()
Числовые и полярные импульсные признаки телемеханических сигналов.
Полярные признаки (рис. 11.3, д я е). При полярных призна-| ках импульсы различаются направлением тока. Для получения по--лярных признаков можно использовать две полярности тока импульсов :1 постоянного тока и две полуволны синусоидальных колебаний пере- § менного тока. На практике применяют преимущественно импульсы постоянного тока. Генерируют полярные признаки переключением: полюсов линейной батареи, а дешифрируют ■— поляризованными реле § или специальными схемами. Полярные признаки можно применять при различных видах селекции. Они мало подвержены искажениям и относятся к неперекрываемым признакам. Однако использование полярных признаков возможно лишь в проводных каналах связи. Для изменения направления тока в линейной цепи необходимо включать линейные батареи на всех пунктах, из которых ведут передачу приказов.
![]()
Эксплуатационно-технические требования к реле.
К 1-му и 2-му классам относятся реле, удовлетворяющие следующим дополнительным требованиям:
отпадание якоря обеспечивается с максимальной гарантией и происходит под действием собственной массы якоря и противовеса;
несвариваемость контактов, через которые замыкаются ответственные цепи, обеспечивается тем, что контакты изготавливаются из разнородных материалов: один контакт - из графита с примесью серебра, другой - из серебра;
исключение залипания якоря к сердечнику после выключения питания реле обеспечивается созданием минимального зазора между якорем и сердечником с помощью антимагнитного штифта (пластины), закрепленного на якоре;
контактное давление должно быть не менее 30 г на контакт для надежного замыкания цепи.
К 2-му и 3-му классам надежности относятся реле, у которых отпадание якоря гарантируется в меньшей степени и происходит главным образом под действием упругости контактных пластин и возвратных пружин.
Датчики магнитного поля на основе эффекта Холла.
UH=RHIB/d , где RH-коэф. Холла для данного материала, RH=1/nl
n-число зарядов протек. Через объем в ед. времени.
l-величина носителя заряда
I- ток, протек.по данному кристаллу.
B- вектор магн. Индукции
d- толщина кристалла полупров., материалы, примен-ся для изготовл.: арамид-индий.
График зависит от наконечников магнитопровода , при нахождении магнита посередине они комплекс. друг другу, а при поднесении их к концу- намагниченность возрастает. Применяют эти датчики в системах зажигания автомобиля.
Маркировки ДНИ-1, ДНИ-2. ДНИ-1 без инвертирующего усилителя, а ДНИ-2 сод. его и коммутирует ток до 0,5.\

Магнито-контактные извещатели.
Состоит из геркона и постоянного магнита. Геркон - стеклянная трубка, герметичная, имеющ. внутри управляемые магн. контакты.
Достоинства:
- большой срок службы при большой надежности
- высокое быстродействие
- малое статист. сопротивление
- малая мощность управления
- высокая степень изоляции
- высокая степень устойчивости
- большой диапазон рабочих температур
- способен выполнять логические операции
- низкая стоимость
- высокая радиационная устойчивость
- высокая устойчивость при перегрузках по току и напряжению
- малая емкость контактов
Недостатки:
- малые коммутаторные токи
-большой уровень наводимых помех связанных с контактами
- небольшое противное напряжение между контактами
- небольшое число конт. пар( групп) в балоне
FH=Ф/S*а* в, где
Ф- величина магнитного потока в зазоре,
в- ширина пластины
а- длина уч-ка перекрытия пл-ти.
Упругая сила пружины направлена противоположно магн. силе. Fу= S(x-α)/2
S- жесткость каждой пружины
х- величина зазора между пружинами
α- случай недеформ. пружины.

Коды обнаруживающие ошибки. Код Бергера.
По коду Бергера подсч-ся число нулей в данном коде и сраавн-ся с числом, записан. в контр. разрядах. Декодер состоит из декодера обычного кода , на выходе которого подкл-ся реле(А) и декодера контрольного разряда.
Для включения объектов примен-ся схема сравнения, где А1 В4, А2 В3, А3 В3, А4 В2-реле.
На приемной стороне расшифр-ся первые три импульса, затем два проверочных.
Элемент релейного действия на туннельном диоде.
При повышении напряжения на входе ключа будет уменьш-ся число электронов, соверш. туннельный переход. А-сам туннельный эффект, В-обл-ть отрицат.дифф.сопротивления, при напряжении минимальном туннельный ток исчезает, а в обл-ти С повыш-ся обычный и диффуз.ток диода. В исходном состоянии (1=0) туннельный диод открыт(т.1), по нагрузке протекает iнагр. Если подать на вход полож.импульс , напряжение на диоде возр-ет до значения большего чем Uмах, при этом ток нагрузки резко уменьш-ся и туннельный диод закр-ся.
Достоинства: высокая раб.частота.
Ключевые схемы на тиристорах.
Тиристор может коммутировать очень большие мощности.
Недостатки: время срабатывания очень велико.
чтобы тиристор откр-ть в прямом направле нии, нужно приложить некоторое напряжение. Если оно будет слишком большое, то он откр-ся самопроизвольно.
Чтобы откр-ть тиристор достаточно небольшого импульса напр.короткой длительности.
Чтобы закрыть тиристор необходимо падать Imin, при котором он закр-ся. Либо подать обр-ое напряжение.
Тиристорный ключ.
Если присутствует акт. индукт. нагрузка
ty=Iвыкл* τ /Iвкл
τ=L/R-длительность переходного процесса, за который сигнал изм-ся в Е раз.
τ=L(Rн+ Rд)/Rн Rд
для случая с одним резистором Rд<(1-Uост)/Iвыкл
если сопр+конденсатор
Lн>( Rд+ Rн)2Cд/I4
В схеме возможно возникновение колебательных процессов.если наблюдается резонанс токов, то тиристор не откроется. Чтобы выкл.тиристор, работающий на перем.токе нужно регулировать нагрузку.
При пост.токе мы можем уменьшить ток для выключения тиристора.
Время включения более длительное и за него мы должны пропустить почти весь ток.
 Терристорный
ключ
Терристорный
ключ
Термоэлектрические преобразователи. Термисторы..
Достоинства-небольшие размеры, малое время отклика(инертность), высокая чувствительность.
Недостатки-нелинейность хар-ки, низкая раб.температура.
Кремниевый:

Для остальных:
![]()

Термоэлектрические преобразователи. Термопары.
Термопара с опорным спаем нах-ся в изотерм.блоке. датчик темпер-ры измеряет температуру оперного спая и сигнал с данного датчика исп-ся для введения дополн. Напряжения в измерит.цепь термопара.
З-н промеж.металлов: если два термопая нах-ся при один.темпер-ре, то они не вносят погрешность в измер.цепь.
Амплитудные и временные импульсные признаки телемеханических сигналов
Амплитудные признаки (рис. 11.3, а). Отличие импульсов при амплитудных признаках заключается в различных амплитудах. тока (напряжения), посылаемых в линейную цепь. Требуемое значение амплитуды тока устанавливают изменением добавочного сопротивления, включаемого в линейную цепь, или изменением напряжения источника тока, питающего эту цепь. Дешифрирование амплитудных признаков осуществляют реле, обладающие различной чувствительностью. Надежное восприятие амплитудных импульсов будет при условии, если коэффициент амплитудного качества
ka=I2/I1=I3/I2=... =4÷6.
Амплитудные признаки можно применять при любом виде селекции и любых каналах связи (проводных и беспроводных). Существенный недостаток, затрудняющий их применение, — это возможность искажений вследствие изменений параметров линейной цепи, действий внешних влияний или неисправностей приемных реле.

Временные признаки (рис. 11.3, б). Различие между импульсами (интервалами) заключается в различной их продолжительности. Чтобы не усложнять приемно-передающие устройства и не снижать надежность фиксации приказов, используют только два временных признака: короткие и удлиненные импульсы (интервалы). Генерирование импульсов (интервалов) различной продолжительности осуществляют с помощью генераторов импульсов (передатчиков), а их дешифрацию — путем сравнения продолжительности принятого импульса (интервала) с фиксированным временем на отпускание якоря приемного реле.
В реальных системах коэффициент удлинения импульса ka=t2/t1=t3/t2=... =3÷4.
Временные признаки можно использовать при всех методах селекции и любых каналах связи. В системах телеуправления с временными признаками импульсов применяют центральное питание линейной цепи. Передачу приказов при временных признаках ведут с использованием как токовых, так и бестоковых импульсов, что сокращает время передачи всего кода примерно в два раза. Недостатком временных признаков является их легкая обратимость из-за влияний и помех в линейной цепи или в приемных устройствах.

АЦП последовательного счета с ЦАП в цепи обратной связи.
Схема АЦП последовательного счета с ЦАП в цепи обратной связи показана на рис 7. По сигналу "Пуск" на вход счетчика начинают подаваться импульсы от генератора тактовой частоты. По мере поступления этих импульсов растет входной код ЦАП и повышается напряжение на его выходе (Uuan). Оно подается на компаратор СС вместе с UBX. В момент, когда указанные напряжения сравниваются, компаратор срабатывает и прекращает работу счетчика. На выходах счетчика устанавливается код, являющийся цифровым эквивалентом входного сигнала. Погрешность преобразования зависит от значения ступеней ицап, погрешности в их формировании и ошибки компаратора в определении равенства UBX и ицап. Время преобразования непостоянно и зависит от UBX.

АЦП двойного интегрирования.
Одной из разновидностей АЦП последовательного счета, характеризующейся повышенной точностью, является преобразователь с промежуточным преобразованием во временной интервал с двойным интегрированием.
Поясним принцип действия такого преобразователя, схема которого приведена на рис. 8, а временные диаграммы работы показаны на рие. ,9. Импульс запуска через триггер Т1 открывает ключ К1, и UBX подается нэ вход интегратора Ин. Напряжение интегратора вместе с постоянным напряжением Uo подаются на входы компаратора СС. В момент времени ti, когда иин становится равным Uo, с СС подается сигнал на триггер ТЗ, он переключается и открывает элемент совпадения, через который на счетчик СТ2 начинают поступать импульсы тактовой частоты от генератора G. Интегрирование ведется до момента t2, когда счетчик переполняется, сбрасывается в исходное состояние и выдает сигнал на триггеры Т1 и Т2. При этом ключ К1 закрывается, а К2 открывается, и на вход интегратора подается напряжение 1)оп, имеющее полярность, обратную UBX Напряжение на выходе интегратора начинает падать. В момент t3, когда иин станет равным UOl с компаратора поступает сигнал, который приводит Т2 и ТЗ в исходное состояние. При этом Uon отключается от входа интегратора, и работа счетчика прекращается.!На нем будет записан код:
![]() где
Т-
период
тактовой частоты; п
- число
разрядов в счетчике.
где
Т-
период
тактовой частоты; п
- число
разрядов в счетчике.

Апериодическое звено САР.
Инерционное (апериодическое) звено. Уравнение звена
![]() Т-
постоянная времени
Т-
постоянная времени
к - коэффициент усиления.
![]()
ЛАХ
звена![]()
Асимптотическая ЛАХ описывается двумя уравнениями
![]()
Первое уравнение отображает горизонтальную прямую, второе - прямую с наклоном — 20 дБ/дек, т.е. при изменении частоты в 10 раз ордината уменьшается на 20 дБ. Пересекаются прямые в точке ω = 1/Т, которая называется частотой сопряжения.
Разность между точной L(ω) и асимптотической La(ω) характеристиками представляет собой поправку к асимптотической характеристике Δ(ω) = L(ω) - La(ω)
Наибольшее значение будет при ω= 1/N, в этой точке Δ= 3 дБ. ЛФХ инерционного звена φ(ω)= - arctg ωТ
Переходная функция
![]()

Виды реле. Комбинированное реле.
Для краткости обозначения типов реле железнодорожной автоматики приняты следующие условные обозначения (шифр) типов реле. Это обозначение состоит из нескольких букв и цифр, означающих (первая буква шифра): Н — нейтральное реле нормального действия; И — импульсное; К — комбинированное; П — поляризованное; О — огневое; Т — трансмиттерное; ДС — двухэлементное секторное; АН — автоблокировочное нейтральное и т. д. Буква на втором месте шифра: М — малогабаритное; третья и следующие буквы: Ш — штепсельное; В—с выпрямительным элементом; МТ — медленнодействующее с термическим (биметаллическим) элементом и т. д. Повторяющиеся буквы означают: П — пусковое; М — медленнодействующее.
Нейтрально-поляризованные (комбинированные) реле типа КР-1 (рис. 5.3, а) и малогабаритные КМШ-450, КМШ-750, КМШ-3000 (рис. 5.3, б) сочетают в одной конструкции нейтральное и поляризованное реле. Основными деталями реле являются постоянный магнит 1, электромагнит 2, обмотка 3, поляризованный якорь 4 и нейтральный якорь 5. Комбинированные реле в отличие от нейтральных имеют три позиции. При выключении и включении тока без перемены полярности работает нейтральный якорь; поляризованный остается у полюса, к которому был притянут. При включении тока противоположной полярности перебрасывается поляризованный и притягивается, нейтральный якорь,- При. быстрой • перемене полярности' тока нейтральный якорь отпадает, поляризованный перебрасывается, затем нейтральный якорь вновь притягивается. В первой конструкции реле КМШ якорь крепится на цапфах. Они изнашиваются, якорь падает и заклинивается. У модернизированного реле поляризованный якорь устанавливается на ноже и крепится винтами, реле обеспечивает 10й срабатываний. При расчете реле КМШ необходимо использовать уравнения, определяющие параметры и характеристики нейтральных реле (магнитная цепь нейтраль) и уравнения для расчета поляризованного якоря. Своеобразной особенностью всех полного якоряяризованных реле является чувствительность к влиянию соседних магнитных .полей. Поэтому не рекомендуется размещать поляризованные реле близко друг к другу, например путевые реле типов ИМШ и ИМШВ следует устанавливать в шкафах на разных полках.

Виды телемеханических систем.
В зависимости от назначения и числа телемеханических каналов различают системы: телеуправления (ТУ), телесигнализации (ТС), телеуправления—телесигнализации (ТУ—ТС), телеизмерений (ТИ), телеуправления—телесигнализации—телеизмерений (ТУ—ТС—ТИ), телерегулирования (ТР), т. е. сочетание функций телеуправления с телеизмерением.
На железнодорожном транспорте наиболее распространены системы ТУ—ТС, причем применяются они в станционных системах кодового управления, в диспетчерской централизации, диспетчерском контроле, кодовой автоблокировке, автоматической локомотивной сигнализации.
Герконовые реле. Герконы.
Стремление к миниатюризации приборов автоматики затронуло и реле. На основе вакуумных контактов разработаны «герконы» (герметические контакты), иначе названные магнитоуправляемыми контактами (МК). В отличие от вакуумных контактов у геркона контактные пружины-язычки выполняют двойную работу — якоря и контакта. Они изготовляются из магнитомягкого материала — сплавов марок 52Н, 47НК, 47НД и др. Для уменьшения переходного сопротивления концы пружин покрывают золотом, родием, рением, палладием или их сплавами. Концы пружин перекрываются на расстоянии 0,3—
1,3 мм.
Принцип действия МК заключается в том, что при наличии магнитного потока пластинки притягиваются друг к другу и замыкают управляемую цепь. При выключении тока МК размыкается упругостью пластин. Поток может создаваться постоянным магйитом или электромагнитом. Если габариты не позволяют перемещать магнит, то поток шунтируется подвижным экраном. В большинстве конструкций реле с МК (язычковых реле) применяется электромагнитный способ управления с разомкнутой магнитной цепью

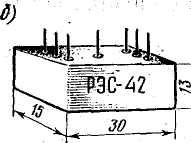


Рис. 2.14. Герконное реле РЭС-42
Временные параметры реле. Временные диаграммы работы реле.
К основным временным параметрам реле относятся:
а) время срабатывания tc_ - промежуток времени с момента подачи питания на обмотку до момента замыкания замыкающих (фронтовых) контактов;
б) время от. пускания tQT - промежуток времени с мо мента отключения питания обмотки до момента замыкания замыкающих (ты ловых) контактов.
Различают также параметры:
а)время трогания t - промежуток времени с момента включения или выключения питания обмотки реле до момента начала движения якоря;
б) время перелета (движения) tnep (1да) - промежуток времени от начала движения якоря до момента срабатывания или отпускания реле.
Временные параметры реле обусловлены переходными процессами, возникающими при включении и выключении реле.
В инженерной практике широкое распространение получил анализ работы релейных устройств с помощью временных диаграмм. На рисунке 1 дан графический анализ работы двух взаимосвязанных нейтральных реле.
Если в момент времени t0 замыкается цепь Питания реле, то якорь, реле притянется не мгновенно, а через некоторое время. В момент времени /, происходит размыкание нижнего, т. е. размыкающего (тылового) контакта. Промежуток времени от tQ до /, называется временем трогания при притяжении (t^). В момент времени t2 общий контакт соединяется с замыкающим фронтовым контактом. Интервал времени от /, до /2 является временем движения якоря (/дв).
М омент
времениt3
соответствует выключению реле. В течение
времени от
t3
до м
t4
якорь
реле уде§якивается в притянутом состоянии
за счет времени замедления
на отпускание. В момент времени t4
происходит
размыкание общего и замыкающего контактов
реле, а в момент /5
общий контакт замыкается
с размыкающим тыловом контактом. Интервал
времени от t3
до
t4
называется
временем трогания (t’тр),
а
от t4
до t5
- временем
движения якоря при
отпускании (t’дв).
омент
времениt3
соответствует выключению реле. В течение
времени от
t3
до м
t4
якорь
реле уде§якивается в притянутом состоянии
за счет времени замедления
на отпускание. В момент времени t4
происходит
размыкание общего и замыкающего контактов
реле, а в момент /5
общий контакт замыкается
с размыкающим тыловом контактом. Интервал
времени от t3
до
t4
называется
временем трогания (t’тр),
а
от t4
до t5
- временем
движения якоря при
отпускании (t’дв).
Для каждого реле откладывается своя ось времени. Если размыкание или замыкание контакта одного из приборов вызывает включение или выключение другого, то на диаграмме это показывается вертикальной линией со стрелкой, направленной в сторону реле, на которое производится воздействие.
Датчики (преобразователи). Классификация датчиков.
Датчиками систем автоматики и телемеханики называются устройства, вьшолняющив функщш измерения регулируемых величин и их преобразования в вид, наиболее удобный для передачи в цепь регулирующего устройства.
Наиболее широко используются измерительные преобразователи с электрической выходной величиной, преобразующие изменение любой физической величины на их входе в изменение величины электрического сопротивления, индуктивности, емкости, напряжения или тока.Основными, характеризующими датчик параметрами служат чувствительность и инерционность.
Чувствительность датчика представляет собой отношение изменения Δу его выходной величины к изменению Δх входной:
S= Δу / Δх или S= dу / dх
Таким образом, чувствительность является первой производной функции, выражающей зависимость выходной величины от входной. Инерционность датчика отражает некоторое запаздывание в измерении значения регулируемого параметра, которое может быть обусловлено массой деталей, индуктивностью, емкостью и другими параметрами самого преобразователя.
Датчики классифицируются на:
Реостатные и потенциометрические
Индуктичные
Емкостные.
Дифференцирующее звено САР.
Идеальное
дифференцирующее звено дает
на выходе величину, пропорциональную
производной от входной величины.
Уравнение 

 Для
реального звена.
Для
реального звена.


Емкостные датчики.
Емкостные устройства
Ёмкостной датчик представляет собой конденсатор, емкость которого изменяется при изменении контролируемой неэлектрической величины. Емкость конденсатора зависит от площади пластин, расстояния между ними и диэлектрической проницаемости среда между обкладками.
Ёмкость датчика Ф с угловым перемещением пластин (рис-. 9) определится по формуле
![]() где
d
- расстояние между пластинами; F
- полная площадь пластин (при а = 0); а -
угол поворота подвижных пластин; eq
-
диэлектрическая проницаемость
вакуума; е - диэлектрическая проницаемость
среды, заключенной между пластинами
конденсатора.
где
d
- расстояние между пластинами; F
- полная площадь пластин (при а = 0); а -
угол поворота подвижных пластин; eq
-
диэлектрическая проницаемость
вакуума; е - диэлектрическая проницаемость
среды, заключенной между пластинами
конденсатора.
Чувствительность
такого датчика
![]()

Достоинства: высокая чувствительность, малая инерционность и хорошие массогабаритные показатели.
Недостатки: 1) мощность выходного сигнала невелика, поэтому необходимо применять усилители;
при промышленной частоте не удается получить значительную мощность датчиков, в связи с чем они обычно получают питание от источников повышенной частоты (10 кГц и более);
значительное влияние оказывают паразитные емкости (особенно емкости соединительных проводов относительно земли), что вынуждает использовать экранирующие элементы для соединительных проводов и самого датчика.
Классификация реле.
Существует много конструктивных разновидностей и типов реле, работающих на различных принципах. Для краткого знакомства сделаем обзор и составим классификацию основных типов реле.
Классы реле определяются видом энергии, на которую реагирует воспринимающая часть реле: электрическая, тепловая, оптическая, акустическая и механическая. Явления взаимодействия, возникающие в реле: электромагнитные, магнитоэлектрические, индукционные и т. д., делят реле на группы с различными принципами действия внутри одного класса (рис. 2.2).

Коды обнаруживающие ошибки. Код с контролем на четность.
Коды
с
контролем
на четность
образуются добавлением
к передаваемой кодовой комбинации
одного контрольного импульса.
Поэтому общее число импульсов в таком
коде
![]()
где И — число информационных импульсов.
Если рассматриваемая кодовая комбинация содержит четное число единиц (за единицу принимаем здесь и в дальнейшем один из импульсных признаков, за нуль — другой), то в этом случае добавляется контрольный импульс, имеющий значение 0. Если же в кодовой комбинации содержится нечетное число единиц, то контрольный импульс имеет значение 1.
С учетом этого На принимающей стороне проверяется наличие в коде четного числа единиц. При четном числе единиц, зафиксированных в принятом коде, последний считается неискаженным и приказ реализуется. При нечетном числе единиц принятый код считается искаженным, а приказ не реализуется. При этом следует иметь в виду, что четное число искажений в таком коде не выявляется, в то время как любое число нечетных искажений обнаруживается.
Избыточность кодов с контролем на четность
![]()
Ключевые схемы на биполярных транзисторах.
Общие положения. Логические элементы применяют для практической реализации логических функций, они выполняются с использованием различных физических явлений и свойств. Широко применяют электромеханические, электромагнитные и полупроводниковые логические элементы. Для всех видов логических элементов общим является дискретный характер их работы, который заключается в том, что входные и выходные величины используются только в крайних значениях. Нижний уровень входного и выходного сигналов считают условно 0, а верхний уровень — 1 независимо от его количественного значения и знака.
Любая сложная логическая функция выполняется с помощью схемы, составленной из схем простейших логических функций НЕ, И и ИЛИ.

![]()
Ключевые схемы на полевых транзисторах.
Относительная простота изготовления транзисторов со структурой металл—окисел—диэлектрик—полупроводник (МОП или МДП транзисторов с полевым эффектом) открывает широкие возможности для создания на их основе сложных логических устройств и интегральных схем с большой и сверхбольшой интеграцией. В отличие от обычных биполярных транзисторов, управляемых током базы, полевые транзисторы по своему принципу действия являются аналогами электронных ламп, так как управляются напряжением. Исток можно считать аналогом эмиттера в биполярном транзисторе, затвор является точкой приложения управляющего напряжения (аналог базы в биполярном транзисторе или сетки в лампе), а сток является выходом прибора (аналог коллектора биполярного транзистора или анода на лампе).
При нулевом напряжении на затворе между истоком и стоком ток протекать не может, т. е. эти области эквивалентны двум диодам, включенным навстречу друг другу. Если же к затвору прикладывается достаточно большое отрицательное напряжение, то под электродом затвора образуется канал р-типа, соединяющий сток и исток за счет притягивания дырок к поверхности, обеспечивая тем самым про хождение тока. Изменение напряжения на затворе будет изменять эффективное сопротивление канала между истоком и стоком, что позволяет получить усиление.

Конструкция и материалы контактов.


Критерии Гурвица для анализа устойчивости САР.
Критерий устойчивости Гурвица основан на построении специальных определителей характеристического уравнения, называемых определителями Гурвица. При составлении главного определителя уравнений системы пользуются следующими правилами:
по главной диагонали выписываются в порядке возрастания все коэффициенты от а1 до аn;
Все столбцы определителя дополняются вверх по диагонали коэффициентами с последовательно возрастающими и вниз - с последовательно убывающими индексами;
Наибольший порядок главного определителя Гурвица принимается равным степени характеристического уравнения n;
На место коэффициентов, индексы которых больше n и меньше нуля, ставятся нули.
В общем случае главный определитель имеет следующий вид:
 Из
главного определителя отчеркиванием
т
столбцов
и т
строк
получают
определитель т
–го порядка Δm.
Так, определитель первого порядка Δ1
= а
1,
определитель второго порядка Δ2=а1а2-
а0а3 и
т. д.
Из
главного определителя отчеркиванием
т
столбцов
и т
строк
получают
определитель т
–го порядка Δm.
Так, определитель первого порядка Δ1
= а
1,
определитель второго порядка Δ2=а1а2-
а0а3 и
т. д.
Критерий Гурвица формулируется следующим образом. Система устойчива, если при а0 > 0 все определители т-го порядка Δm больше нуля (где т = 1, 2, 3...). Согласно этому критерию можно установить простые условия устойчивости при невысокой степени характеристического уравнения САР.
Критерии Раута (Рауса) для анализа устойчивости САР
Допустим, что характеристическое уравнение исследуемой САР имеет вид
аорn + а1рn+1+...+ аn-1р +аn=0 :
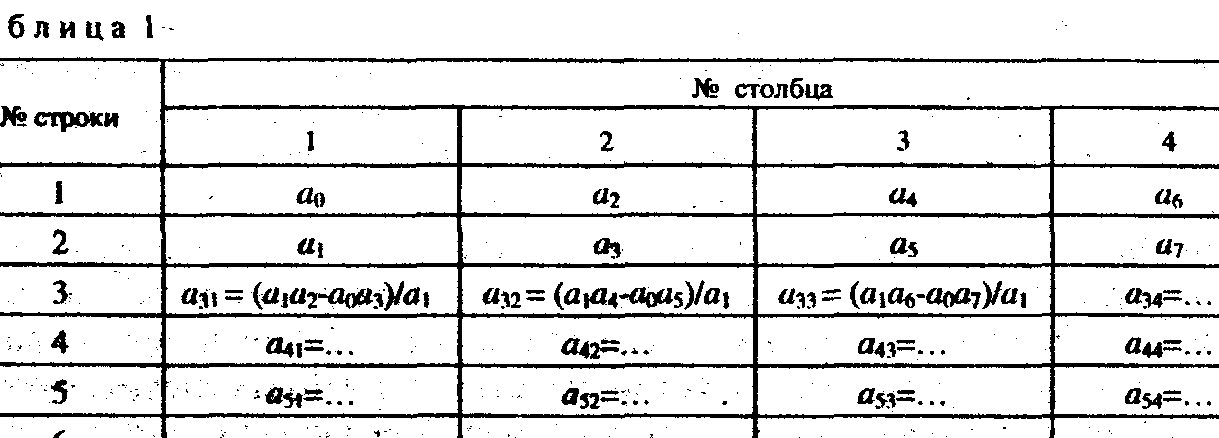
Для определения устойчивости составим таблицу Рауса по следующим правилам: первая строка составляется из четных коэффициентов уравнения (ао, а2 и т. д.), вторая - из нечетных (а1, а3 и т. д.), в третью и последующие строки записывается разность произведений коэффициентов, разделённая на нечетный коэффициент предыдущей строки, находящийся в первом-столбце.
Составление таблицы прерывается, как только первый элемент какой-либо строки оказывается отрицательным или равным нулю; Если при анализе данных этой таблицы окажется, что все элементы первого столбец будут отличны от нуля и положительны при условии, что коэффициент a0 старшего члена уравнения больше нуля, то система устойчива. Распределение коэффициентов характеристического уравнения по строкам и столбцам приведено в таблице 1
Методы оценки показателей качества процесса регулирования. Частотные оценки
Показатели качества САР могут быть определены, если найдено решение дифференциального уравнения системы и построена, кривая процесса регулирования у (t). Но такой путь является сложным, поэтому оценивают качество САР обычно косвенными методами, не требующими решения дифференциального уравнения. В этих методах используются специальные критерии качества переходных процессов, которые делятся на три группы — корневые, частотные и интегральные. При этом оценивают качество обычно для случая, когда воздействием является единичный мгновенный скачок входной величины г (t), т. е. переходный процесс определяется переходной характеристикой системы.
Частотные критерии дают возможность оценить качество переходного процесса по частотным характеристикам САР. Таким критерием является показатель колебательности М, который определяется по амплитудной частотной характеристике. Величина М равна относительной высоте резонансного пика АЧХ (см. рис. 15.15, а), т. е.
![]()
Чем больше М, тем больше колебательность системы и меньше ее запас устойчивости. При М < 1 в системе не возникает колебаний. Обычно величина М не должна превосходить по значению 1,1 — 1,5.
Длительность
переходного процесса tn
может
быть оненена по значению
резонансной частоты ω0
(см. рис. 15.15, а), при которой АЧХ достигает
максимума. Так как частота колебаний
САР в переходном процессе
приблизительно, равна резонансной, то,
предполагая, что система
совершает одно-два колебания, время ta
оценивается
временем одного-двух
периодов:![]()
Из выражения следует, что чем больше резонансная частота системы, т. е. чем шире частотная характеристика, тем меньше время переходного процесса
.
Методы оценки показателей качества процесса регулирования. Корневые оценки.
Показатели качества САР могут быть определены, если найдено решение дифференциального уравнения системы и построена, кривая процесса регулирования у (t). Но такой путь является сложным, поэтому оценивают качество САР обычно косвенными методами, не требующими решения дифференциального уравнения. В этих методах используются специальные критерии качества переходных процессов, которые делятся на три группы — корневые, частотные и интегральные. При этом оценивают качество обычно для случая, когда воздействием является единичный мгновенный скачок входной величины г (t), т. е. переходный процесс определяется переходной характеристикой системы.
К орневые
критерии позволяют оценить качество
САР по значениямполюсов
и нулей передаточной функции. Передаточная
функция системы
автоматического регулирования К(р) =
М(р)/ D(p)
орневые
критерии позволяют оценить качество
САР по значениямполюсов
и нулей передаточной функции. Передаточная
функция системы
автоматического регулирования К(р) =
М(р)/ D(p)
где D(p) — характеристический полинвм левой части уравнения; М (р) —арактеристический полином правой части.уравнения г.т. е.
![]()
![]()
Корни полинома М (р)ро1…Рот являются нулями передаточной функции, так как при р =poi К (р) = 0. Корни полинома D (р) p1, рг… Рп являются полюсами передаточной функции, так как при
при
р
=piК
(р) =
∞Переходный
процесс в системе определяется функцией![]()
График функции у (t), т. е. форма переходного процесса, зависит от полюсов передаточной функции рь и постоянных интегрирования Ci. Как было показано выше, характер переходного процесса с точки зрения его затухания, т. е. устойчивость системы, полностью определяется полюсами передаточной функции. Однако при оценке качества переходного процесса необходимо учитывать также и влияние на график у (0 постоянных Ci. Последние зависят от правой части дифференциального уравнения ,т. е. от нулей передаточной функции.

Мостовые схемы.
В мостовой схеме поляризующий поток Фо проходит последовательно два воздушных зазора, имеет одно направление и проходит поперек якоря. Рабочий поток Фк проходит вдоль якоря, в каждом воздушном промежутке имеет разное направление.. Мостовые схемы обладают большой чувствительностью, так как рабочий поток, создаваемый обмоткой. реле, проходит по одному зазору и, следовательно, имеет меньшее сопротивление магнитной цепи.
Различают следующие виды мостов:
- четвертьмостовая
 Для
случая возб.
UD
Для
случая возб.
UD

Нелинейность – 0,5%
Дляслучая возб. IB

- полумостовая
Различают два случая:
Оба чувствительных элемента изменяются в одну и ту же сторону,
Чувствительные элементы изменяются в разнве стороны.
1)
в озб.
напр.UB
озб.
напр.UB

Нелинейность – 0,5%
Возб. тока ID
![]()
2)
![]()

![]()
Нелинейность – 0%
- полный мост
![]()
![]()
Нелинейность – 0%
Нейтральные реле ЖА и С.
Нейтральное реле – реле, у которого его действие определяется только величиной магнитного потока и не зависит от напряжения тока в обмотке.

Нелинейные и импульсные системы автоматического регулирования.
В импульсных системах содержится хотя бы одно звено импульсного действия, выходная величина которого представляет собой последовательность импульсов. Амплитуда, длительность или частота этих импульсов определяется входной величиной. В
таких системах регулирование производится импульсами, в промежутках между которыми регулятор может быть отключен от объекта и использован для регулирования других объектов.
В зависимости от вида уравнений, которые описывают работу САР, различают линейные и нелинейные системы. Линейной является система, уравнения всех звеньев которой есть линейные дифференциальные уравнения. Наличие хотя бы одного нелинейного звена делает систему нелинейной. Расчет линейных систем существенно проще расчета нелинейных систем, так как, во-первых, линейные уравнения решаются проще, а во-вторых, к линейным системам применим принцип суперпозиции. Он состоит в том, что реакция системы на совокупность внешних воздействий равна сумме реакций на каждое воздействие в отдельности. Поскольку, строго говоря, линейных систем не существует, в каждом конкретном случае надо стремиться путем разумных упрощений добиться линейности описания системы. В дальнейшем рассматривается теория непрерывных линейных САР.
Определение параметров типовых звеньев САР по логарифмическим частотным и переходным характеристикам.
Для описания динамических свойств звеньев САР применяются два вида характеристик - частотные и переходные.
Частотные характеристики представляют в различных видах зависимости ККУ от частоты со. Наиболее широко используется амплитудная частотная характеристика - зависимость модуля ККУ от частоты и фазовая частотная характеристика φ(ω) - зависимость аргумента ККУ от частоты.
Для инженерных расчетов более удобно амплитудную и фазовую частотные характеристики изображать в логарифмическом масштабе.
При построении логарифмической амплитудной частотной характеристики (ЛАХ) по оси ординат откладывают величину
L(ω) = 20 lg К(ω)
единицей измерения для которой является децибел (дБ). По оси абсцисс откладывается круговая частота ω |1/c| в логарифмическом масштабе, т.е. фактически откладывается величина lg ω, но указывается значение самой частоты ω.
1. Безынерционное (усилительное) звено. Уравнение звена
у = кk,
где k-- коэффициент усиления (постоянная величина). Передаточная функция и ККУ звена
К(р)=k ; K(jω)=k. Логарифмические, частотные характеристики L(ω) = 20lgk ; φ(ω)=0.
Переходная функция h(t) = k.

Инерционное
(апериодическое) звено.
Уравнение
звена![]() ,
где Т – постоянная времени.
,
где Т – постоянная времени.
к - коэффициент усиления.
ЛАХ
звена:
![]()
ЛФХ инерционного звена: φ(ω) = -arctg ωT
Переходная
функция
![]()

3.
Интегрирующее
звено.
Уравнение
звена
![]()
ЛАХ:
![]()
ЛФК: φ(ω) = -900
Переходная функция: h(t) = kt

Дифференцирующее звено.
Уравнение
звена:
![]()
ЛАХ: L(ω) = 20 lg k + 20 lg ω
ЛФХ: φ(ω) = 900
Переходная функция: h(t) = kδ(t)
Где δ – дельта- функция.

Колебательное звено.
Уравнение
звена:
![]()
ЛАХ:
![]()
ЛФХ:
![]()
Переходная
функция:
![]()

Основные понятия телемеханики. Способы управления объектами на расстоянии.
По способу организации управления и энергоснабжения исполнительных механизмов различают системы местные, дистанционные и телемеханические.
При местном способе энергию, необходимую для приведения в действие управляемого объекта, передают с поста по соединительным проводам.
Местный способ управления целесообразен лишь при небольших расстояниях между пунктами управления и управляемыми объектами.
Увеличение дальности управления объектами при том же сечении проводов может быть достигнуто применением дистанционного способа управления, когда управляющие реле располагают в непосредственной близости от объектов
Дистанционный способ управления применяют в релейной централизации с местным питанием. При этом управляющие реле устанавливают в специальной релейной будке, расположенной в непосредственной близости от объектов управления
При значительных расстояниях до объектов управления переходят на телемеханический способ управления, при котором для уменьшения числа каналов связи используют различные методы селекции (избирания). Это дает возможность управлять по одному каналу связи группой удаленных объектов. При этом способе на пункте управления устанавливают передатчик с шифратором, на пункте приема — приемник с дешифратором. Передают приказы объектам с помощью передатчика, который совместно с шифратором преобразует приказы в серии импульсов (коды), которые поступают в линейную цепь. На пункте приема код управления воспринимает приемник, а расшифровывает дешифратор, после чего выбирается соответствующий объект. Таким образом, предмет телемеханики составляют устройства преобразования технологической информации в сигналы (и наоборот), обеспечивающие независимую их передачу по общей линии связи на любое расстояние для управления, контроля (сигнализации) и измерений.
В зависимости от назначения и числа телемеханических каналов различают системы: телеуправления (ТУ), телесигнализации (ТС), телеуправления—телесигнализации (ТУ—ТС), телеизмерений (ТИ), телеуправления—телесигнализации—телеизмерений (ТУ—ТС—ТИ), телерегулирования (ТР), т. е. сочетание функций телеуправления с телеизмерением.
Основные понятия теории автоматического управления. Классификация систем автоматического управления и регулирования.
Почти любой технологический процесс в современном производстве требует поддерживать некоторые величины постоянными или изменять их по некоторому закону.
Процесс изменения по заданному закону определенной величины называется процессом регулирования, а сама эта величина называется регулируемой величиной. Процесс регулирования может осуществляться человеком (неавтоматическое регулирование) либо автоматическим управляющим устройством, которое называется в данном случае автоматическим регулятором (АР). Совокупность управляемого объекта и автоматического регулятора образует систему автоматического регулирования (САР).

Классификация САР:
1.В зависимости от закона изменения задаваемой величины х0 (t) различают три вида систем: стабилизирующие, программные и следящие.
2.В зависимости от способа воздействия измерительного устройства на исполнительное различают системы п р я м о го и н е прямого регулирования.
3.В зависимости от характера воздействия, оказываемого регулятором на регулируемый объект, различают системы непрерывного, импульсного и р е л е й н о г о д е йс т вия.
4.В зависимости от вида уравнений, которые описывают работу САР, различают линейные и нелинейные системы.
Показатели качества процесса регулирования САР.
Качество САР определяют следующие показатели:
1.. Установившееся отклонение yуст, под которым понимается значение регулируемой величины у по истечении сколь угодно большого отрезка времени после начала переходного процесса, т. е.
![]()
Величина yуст характеризует точность системы в установившемся режиме.
2.
Время регулирования tП
(время
переходного процесса), по истечении
которого обеспечивается условие![]()
где Δ— заданная точность регулирования.
3. Максимальное перерегулирование
![]()
где ymax – максимальное отклонение регулируемой величины.
Величина σ характеризует точность системы в переходном процессе и обычно не должна превышать 40%.
4. Число перерегулирований δ, т. е. число максимумов функции у(t) за время переходного процесса, больших по значению, чем yуст+Δ.
Величина
δ
характеризует колебательность системы.
Обычно приемлемым считается
![]() , но в некоторых случаях колебательность
вообще не допускается.
, но в некоторых случаях колебательность
вообще не допускается.
Поляризованное реле.
Поляризованное реле – такое реле, направление перемещения якоря которого зависит от полярности приложенного напряжения или от направления тока в обмотке.
Поляризованные реле от нейтральных отличаются тем, что имеют два воздушных промежутка в магнитной цепи δ1 и δ2. При срабатывании якоря один промежуток уменьшается, второй увеличивается. В соответствии с этим на якорь действуют две силы fэ1 и fэ2. Кроме того, на поляризованный якорь действуют два независимых потока: рабочий и поляризующий, создаваемые соответственно током обмотки и постоянным магнитом. Имеются реле с поляризующим
потоком, создаваемым специальными подмагничивающими обмотками.
Поляризующий поток Фо обеспечивает направленность действия якоря при изменении направления тока в обмотке и удерживает якорь в заданном положении при выключенном токе.
Рабочий поток Фк, взаимодействуя с поляризующим, перемещает якорь из одного положения в другое. Поэтому поляризованный якорь реагирует на направление тока в обмотке.
Каждая сила fэ1 и fэ2 создается результирующим потоком Фо + Фк или Фо-Фк. Поляризованный якорь перемещается под действием равнодействующей силы к тому полюсу, в воздушном промежутке которого потоки складываются.
По конструкции магнитной цепи различают дифференциальные (рис.1) и мостовые системы (рис.2), которые отличаются распределением потоков в воздушных зазорах.


Рис.1 Рис.2
Потенциометрические (реостатные ) датчики.
Реостатные устройства, предназначенные для съема сигналов, преобразуют выходное перемещение чувствительного элемента в постоянный или переменный ток за счет изменения величины своего электрического сопротивления. Различают датчики с угловым и линейным перемещением подвижного контакта, соединенного с подвижной частью объекта, изменение положения которой измеряется.
Для потенциометрического устройства с линейным перемещением входной величиной является положение подвижного контакта X, выходной - напряжение UН, которое пропорционально сопротивлению устройства, воспроизводящему изменение положения ползунка. Без учета влияния сопротивления нагрузки характеристика реостатного устройства определяется выражением
UH =(U0 / R) RX
где R - сопротивление потенциометра; UQ - напряжение питания; Rх - выходное сопротивление потенциометра, составляющее RX = (R/l)X; l - длина намотки потенциометра.
С учетом приведенных обозначений UH = (U0/l)X. Из этого выражения видно, что выходное напряжение линейно зависит от перемещения движка. Чувствительность реостатного устройства в этом случае δ = U0/l Наличие нагрузки вносит определенную погрешность, которая увеличивается по мере уменьшения сопротивления нагрузки. Если у потенциометрического устройства сделать отвод от середины обмотки, то такой датчик будет характеризовать не только значение, но и направление перемещения движка. Иногда такое устройство называют реверсивным датчиком.

21 Параметры реле:
Мощность срабатывания
мощность на выходе реле, при которой оно замыкает управляемую цепь;
Входная велич. – U,I подаваемые в обмотку.
Выходная – замыкание/ размыкание контактов (двоичный сигнал «0» «1»)
Время срабатывания tср(tпр)
Интервал времени от момента подачи на вход реле управляющего воздействия до начала коммутации управляемой цепи
tcp=tтрср+tперср
tтроганияср – время с момента включения цепи реле до момента размыкания тыловых контактов;
tперелетаср – время с момента размыкания тылового контактов до момента замыкания фронтового.
Время отпускания (tотп ).
Интервал времени от момента прекращения управляющего воздействия на входе реле до начала размыкания управляемой цепи.
tотп=tтр.отп+tпер.отп
tтр.отп – время с момента выключения цепи реле до момента размыкания фронтового контакта;
tпер.отп – время с момента размыкания фронтового контакта до момента замыкания тылового контакта.
Мощность управления – электрическая мощность цепи (или тока коммутации).
Ток притяжения (срабатывания)
Iпр(Iср) – линейный ток в обмотке реле, при котором реле отпускает якорь и замыкаются фронтовые контакты.
Ток отпускания Iотп – максимальный ток в обмотке реле, при котором реле отпускает якорь и замыкаются тыловые контакты.
Рабочий ток Iр – ток перегрузки, при котором обеспечивается надежное притягивание якоря Iр>Iср.
Коэффициент возврата
![]()
Чем больше КВ, надежнее работа реле на отпускание, поэтому этот коэффициент называется еще коэффициентом безопасности. Чем ближе КВ к 1 ,тем лучше. Обычно КВ=0,3÷0,5.
Коэффициент запаса
КЗ=IР/IСР>1
Чем больше КЗ, тем надежнее работа реле на притяжение, но больше энергия, потребляемая реле;
Обычно КЗ=1,4÷4
реле Iкл.над КЗ=1,5÷4
реле промышл. автомат. КЗ=1,1÷2
31Бесконтактные реле.
Трансмиттерные реле ТШ – 5.

Это реле имеет переключающее устройство на тиристорах VS1 и VS2. Оно предназначено для коммутации тока в рельсовых цепях частотой 25, 50 и 75 Гц при напряжении до 250 В и мощности до 500 ВА. Амплитуда предельно допустимого коммутационного напряжения не должна превышать 400 В. При большом напряжении тиристоры теряют управляемость.
Детали бесконтактного реле размещены в корпусе реле НШ. Внутри кожуха расположено также реле Р тип КДР1, контакты которого используются в схеме включения дешифраторной ячейки и в цепи управления тиристорами.
Реле управляется контактами трансмиттера КПТ. Диод VT7 и резистор R5 образуют искрогасительный контур.
Ток РЦ коммутируется тиристорами VS1 и VS2. В интервалах кода цепь управления тиристоров резисторами, и они не проводят ток.
![]() В
импульсах замыкается контакт трансмиттера
КПТ и срабатывает реле Р, которое в свою
очередь своим контактом замыкает цепи
управления тиристоров.
В
импульсах замыкается контакт трансмиттера
КПТ и срабатывает реле Р, которое в свою
очередь своим контактом замыкает цепи
управления тиристоров.
При положительной полярности тока на аноде (а) тиристора VS1 ток управления проходит по цепи: Пх220, диод VD6 , резистор R4, фронтовой контакт реле Р, управляющий электрод (уэ) тиристора VS1, фронтовой контакт контрольного реле К, первичная обмотка путевого тр-ра ПТ, Ох220.
Под действием тока управления тиристор VS1 отрывается и пропускает положительную полуволну.
При отрицательной полуволне переменного тока тиристор VS1 заперт отрицательным по отношению к аноду напряжением. В этот полупериод напряжение положительной полярности будет на аноде тиристораVS2 и по его цепи управления будет протекать ток: Ох 220, обмотка ПТ, фронтовой контакт реле К, диод VD5, контакт реле Р, резистор R4, управляющий электрод (УЭ) тиристора VS2, ПХ220. Тиристор VS2 скрывается и попускает вторую полуволну переменного тока.
Таким образом всё время импульса, пока замкнута цепь управления тиристоров, они поочередно пропускают полуволны переменного тока, который поступает РЦ.
 После
окончания импульса и размыкания цепи
управления закрытый тиристор больше
не открывается, а открытый тиристор
закрывается вовремя похождения
переменного тока через нужное значение.
Оба тиристора оказываются закрытыми,
и ток в РЦ не поступает до момента
следующего замыкания цепи управления.
После
окончания импульса и размыкания цепи
управления закрытый тиристор больше
не открывается, а открытый тиристор
закрывается вовремя похождения
переменного тока через нужное значение.
Оба тиристора оказываются закрытыми,
и ток в РЦ не поступает до момента
следующего замыкания цепи управления.
Для исключения посылки в РЦ непрерывного тока в случае пробоя одного из тиристоров установлено контрольное реле К. Оно получает питание во время интервалов кода от диодного моста, который подключен параллельно тиристорам. Для непрерывного удержания якоря реле при импульсном питании параллельно обмотке реле включены электролитические конденсаторы С1 и С2. В случае пробоя одного из тиристоров или обоих одновременно напряжение переменного тока на входе моста VD1-VD4 исчезает, реле К отступает якорь и контактом размыкает цепь питания РЦ.
При включении реле ТШ-5 контрольная реле К первоначально получает питание через собственный тыловой контакт и дополнительную нагрузку из резисторов R2 и R3. После срабатывания реле К подпитывается РЦ, а резисторы R2 и R3 отключаются.
Реле К может не устанавливаться, Если нет опасности ложной работы устройств РЦ.