

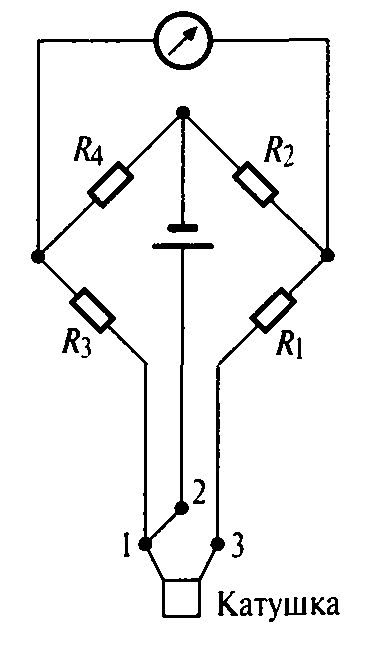
18. 3-Х проводная
При помощи использования либо трехпроводной, либо четы-
рехпроводной схемы можно добиться компенсации температурных
воздействий на величину сопротивления соединительных проводов
при подключении к мосту термометра сопротивления. Компенсационный провод 1 включен последовательно с
резистором R3, в то время как вывод 3 включен последовательно с
платиновым резистором катушки R1. Вывод 2 соединен с источником питания. Любое изменение сопротивлений выводов будет действовать на все три провода одинаково, так что в двух плечах моста будут одновременно происходить аналогичные изменения сопротивлений, которые и будут компенсироваться, если резисторы R1 и R3 имеют одинаковые значения сопротивлений.
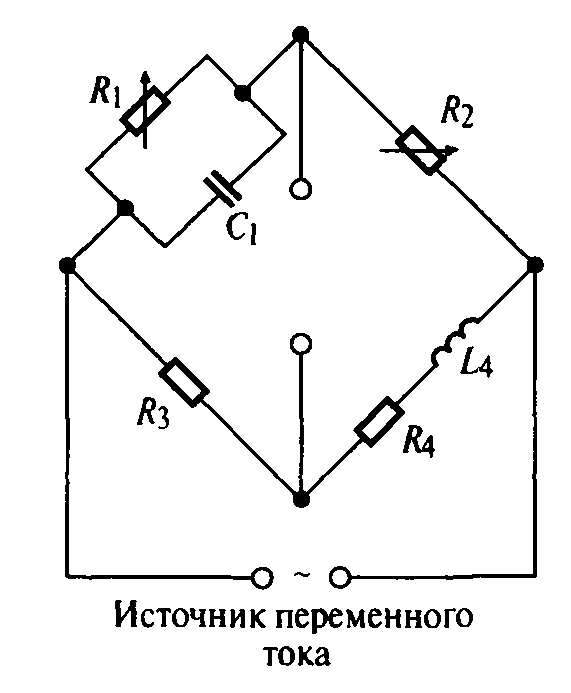
19. Принципиальная схема моста переменного тока.
Условие для получения нулевой разности потенциалов между точками В и D, т.е. условие баланса моста, состоит в
![]()
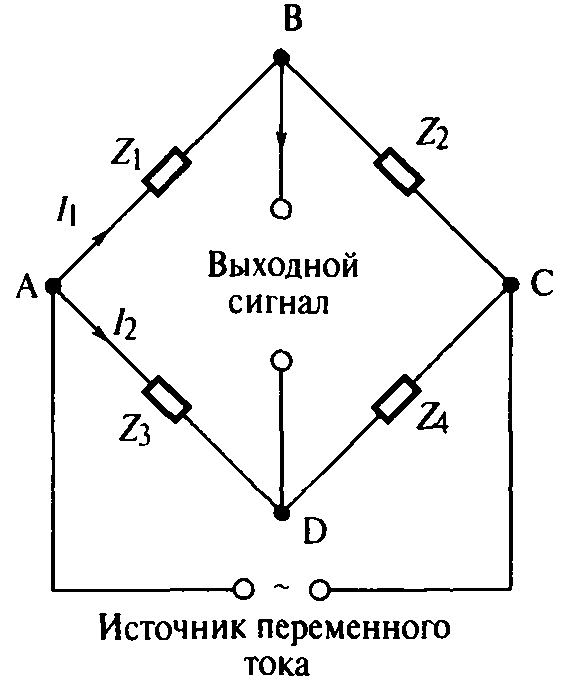
Схема моста Максвелла—Вина представлена на Рис.
используя уравнение баланса, получаем:
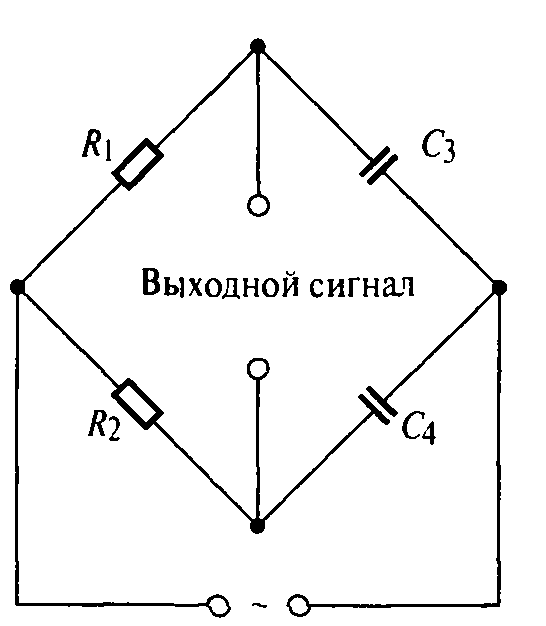
20.Мост Шеринга и Сьюти

Мост Шеринга

Мост Сьюти
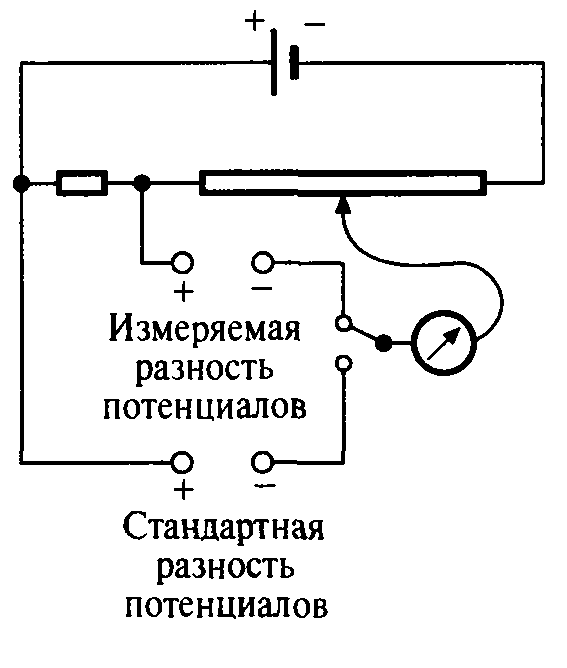
21. Самобалансирующийся потенциометр
На Рис. показана принципиальная схема самобалансирующегося потенциометрического моста. Разность измеряемого напряжения и падения потенциала на сегменте потенциометрического трека подается через усилитель на электродвигатель. Ось двигателя начинает вращаться, при этом перемещая подвижный контакт потенциометра по треку до тех пор, пока разность потенциалов между этими двумя сигналами не сократится до нуля. Положение подвижного контакта потенциометра в этом случае зафиксирует измеряемую разность потенциалов.

22. Термопарный потенциометрический мост
На Рис. показана разновидность потенциометрического
моста, который может быть использован с термопарой. Э.д.с. от
термопары составляет всего милливольты. Последовательно с
потенциометром включается резистор для того, чтобы
обеспечить соответствующую небольшую разность потенциалов на
единицу длины или угла трека. Полезно выполнить трек
потенциометра как можно длиннее. Э.д.с. термопары балансируется
только на длине трека, в то время как стандартный элемент,
который имеет намного большую собственную э.д.с,
балансируется на длине трека плюс добавочное сопротивление.
23. Помехозащищенность систем индустриальной автоматизации. Случайные шумовые помехи (тепловой шум, дробовой шум, фликкер-шум, шум из-за дребезга контактов).
Шум- любые причины отклонение показ. Сенсора от истинного значения, которые имеют случайный характер.
Шумы бывают: внутр, внешн.
Случайный шум возникает из-за хаотич движение электронов и других зар частиц в эл-х и определяются основн физич х-ками компонентов данной системы.
Тепловой шум-генер хаотич дв эл-в
Дробовой шум-возникает из- за случ скорости диф. зар. частиц потенц барьеры, такие как р-н перех
Шум фликкер- возникает из-за движение потока зар частиц в неоднор среде
Помехи- нежелательн сигнал, которые могут усилится и интерф. С полезным сигналом
24. Три основных вида интерференции. Пути прохождения емкостной и индуктивной помехи.
1 ) Электромагнит связь- близко располож провод… вызывают « наводку»( вроде так)
2)Емкостная связь-проводники рассполож близко и разделены диэлектриком
3) Плохое заземление- в нескольких точках земли м.б разность потенц между ними