

31.Аналого-цифровые преобразователи
При аналого-цифровом преобразовании (АЦП) входной
сигнал связан с выходным следующей зависимостью:

где
![]() — напряжение на аналоговом входе,
— напряжение на аналоговом входе,![]() — опорное
— опорное
напряжение,
![]() —
цифровые выходы,n
— число таких выходов. Все эти выходы
вместе и составляют двоичное слово,
соответствующее величине аналогового
сигнала1. Так как выходной сигнал
преобразователя растет ступенчато, то
и
—
цифровые выходы,n
— число таких выходов. Все эти выходы
вместе и составляют двоичное слово,
соответствующее величине аналогового
сигнала1. Так как выходной сигнал
преобразователя растет ступенчато, то
и
вышеприведенное уравнение имеет знак ≈ .
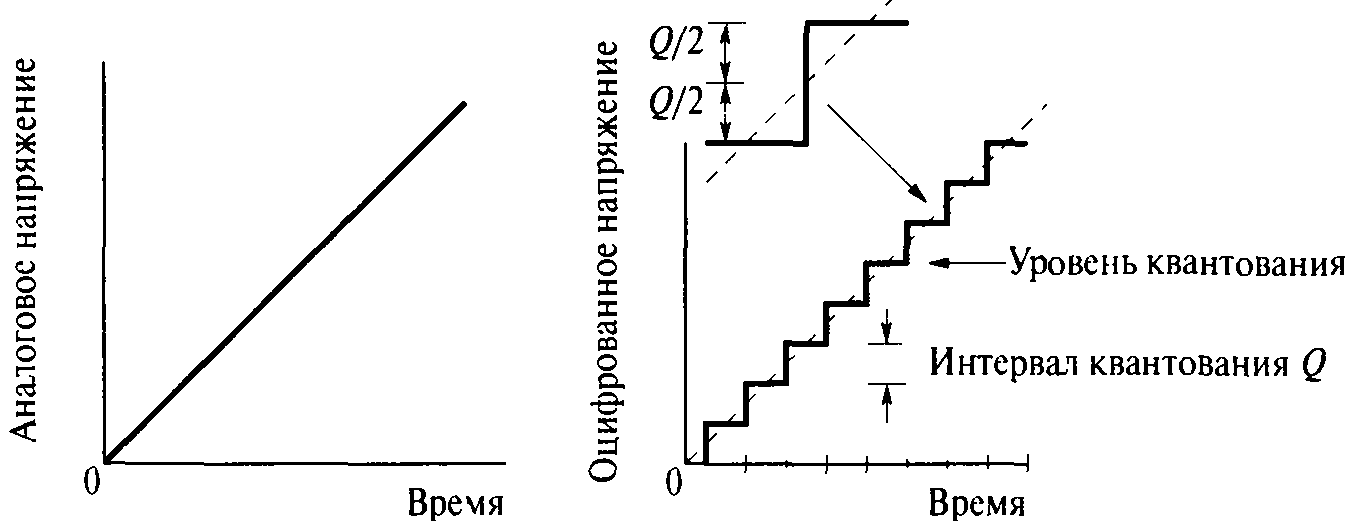
Термин квантование используется для обозначения преобразования непрерывного аналогового сигнала в ступенчатый дискретный выходной сигнал. Каждая ступенька или уровень напряжения такого выходного сигнала называется уровнем квантования.
Интервал квантования — это разность уровней напряжения между
двумя соседними ступеньками. Интервал квантования равен
выходному сигналу, создаваемому младшим значащим битом
двоичного входного слова. Так как квантованный сигнал может
меняться только ступенчато, то возникает погрешность АЦП,
называемая погрешностью квантования, которая изменяется в
диапазоне плюс—минус половина интервала квантования Q, т.е.
± 0.5Q.
26. Аддитивные и мультипликативные помехи. Помехи нормального и общего вида. Подавление случайных шумовых помех.
Помехи делятся на аддитивные(Uвх=Uc+Un) и мультипликативные(Uвх=Uс(1+m*Un)
Аддитивные делятся на:
1.нормального вида(ослабляют фильтр и интегрир.)
2.общего вида(м-ду двумя землями корпуса изм. пр. и ист. сигнала)
Подавление случайных шумовых помех
КПНШ=20lg(Vn/Ve) Дб, где
Vn-пик V помехи
Ve-пик V погрешности
КПНШ - коэфф. подавления норм. шума
Норм. шум – шум, возник внутри источника сигнала.
КПСШ=20lg(Vcm/Ve) Дб, где
Vcm - пик V помехи
Ve - пик V погрешности
КПНШ - коэфф. подавления синф. шума
Синфазный. шум – шум, возник между выводом заземлением и низкопотенц. выводом изм. системы.
Отношение сигнал/шум.
Отнош. СКВ значения сигнала к СКВ знач. шума(за искл. гармонич. искажений) в dB
SNR = 20log Vs/Vn
Cпектр шума кв. равномерно распредел.
SNR = 6,02N + 1,76
27. Классификация цифровых фильтров. Преимущества цифровых фильтров перед аналоговыми. Способы реализации цифровых фильтров.
Цифровой фильтр- фильтр, обр. сигнал с целью выделения или подавления определ. частоты этого сигнала.
Цифровой лучше аналог.:
-высокая точность
-компактность
-простота реализации
Способы реализации цифр. фильтров:
-Аппаратный – реализация на элементах цифр. схем;
-Программный.
32. Устройства выборки и хранения
Во время аналого-цифрового преобразования аналоговый
сигнал не должен меняться до тех пор, пока преобразователь не
закончит полный цикл работы. По этой причине и необходимо
использовать устройства выборки и хранения. Это устройство
запоминает значение аналогового входного сигнала и хранит его
до окончания аналого-цифрового преобразования. В простейшем случае это может быть конденсатор, включенный параллельно входу, который заряжается до уровня входного аналогового напряжения. Затем эта разность потенциалов «удерживается» до тех пор, пока аналого-цифровой преобразователь не примет это значение.
Следующие термины используются для описания характеристики устройств выборки и хранения.
Время захвата — это время, которое необходимо для зарядки
конденсатора до уровня входного сигнала. Время перехода от режима выборки в режим хранения — это время, которое необходимо для изменения режима работы устройства или зарядки, или разрядки конденсатора.
Время удержания — это интервал времени, в течение которого устройство выборки и хранения может удерживать заряд, потеряв не больше определенного количества процентов от его первоначального значения.