

7.Переменное магнитное сопротивление
Величина магнитного потока в последовательной цепи
зависит от магнитного сопротивления элементов этой цепи. Для
случая,
показанного на Рис., частью цепи является
слой воздуха между ферромагнитной
пластиной и ферромагнитным ердечником.
Величина этого воздушного зазора
изменяется при перемещении пластины.
Следовательно, это приводит к изменению
магнитного потока в цепи. Это изменение
магнитного потока связано с изменением
индуктивности катушки на сердечнике.
Следовательно, величину перемещения
пластины можно определять по изменению
индуктивности катушки. 
Датчик переменного магнитного сопротивления
Когда
воздушный зазор равен нулю, т.е. d = 0, а
магнитное сопротивление сердечника и
пластины в сумме равно S0, индуктивность
катушки (магн.
Зазор =0)
(магн.
Зазор =0)
Следовательно, значение индуктивности обмотки равно: Когда воздушный зазор не равен нулю, его магнитное сопротивление
 где
M0
— магнитная проницаемость вакуума,
где
M0
— магнитная проницаемость вакуума,
2d — величина пути магнитного потока в зазорах, А — площадь
поперечного сечения зазора. Тогда общее сопротивление цепи
определяется
выражением:

Следовательно индуктивность обмлтки:

Индукционный тахогенератор
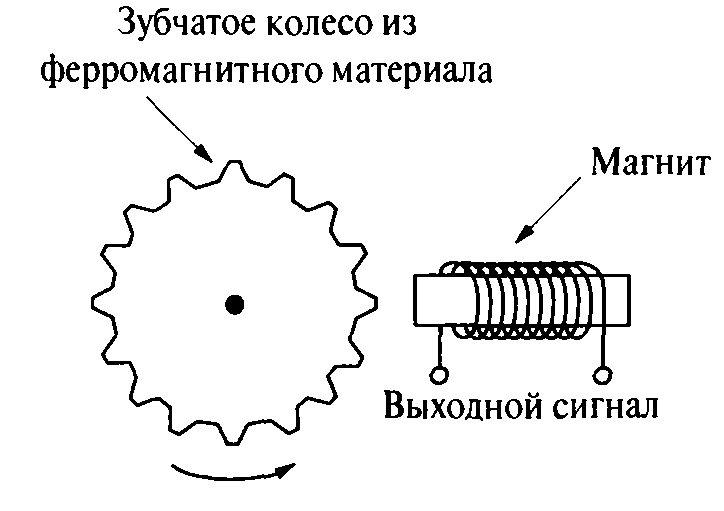
используется для измерения угловой скорости вращения
вала. Он состоит из зубчатого ферромагнитного колеса, которое
вращается вместе с валом, и приемного устройства, состоящего
из постоянного магнита, вокруг которого намотана катушка. В
катушке возникает импульсное напряжение всякий раз, когда
мимо нее проходит зубец колеса


8.Дифференциальный индуктивный преобразователь
состоит из двух одинаковых катушек, между которыми помещен
движущийся якорь (сердечник) из высокопроницаемого магнитного
материала

Индуктивность каждой катушки зависит от длины части сердечника, находящегося внутри нее. Когда сердечник располагается так, что внутри каждой катушки он имеет участок одинаковой длины, индуктивность обоих катушек будет равна. Любое движение якоря вызывает в одной из катушек увеличение индуктивности, а в другой — ее уменьшение. Таким образом, по величине разности значений индуктивности двух катушек можно определять величину перемещения стержня.
Перестраиваемый дифференциальный трансформатор
Линейно перестраиваемый дифференциальный трансформатор (ЛПДТ) — это трансформатор с одной первичной обмоткой и двумя вторичными обмотками. Обе вторичные обмотки соединены последовательно так, что их выходные сигналы направлены навстречу друг другу. Переменное напряжение поступает на первичную обмотку и наводит переменную э.д.с. во вторичных обмотках. Обе вторичные обмотки идентичны, поэтому, когда сердечник находится в центральном положении, т.е. в каждой вторичной обмотке расположены его части равной длины, э.д.с, наведенные в них, будут одинаковы. Но так как они соединены противоположно друг другу, результирующий выходной сигнал оказывается равным нулю. Изменение положения сердечника приведет к тому, что в обмотках будут находиться его участки разной длины. Как результат, наведенная э.д.с. в одной из обмоток становится больше, чем в другой, и появляется ненулевой выходной сигнал.
Интеллектуальные магнитные сенсоры (Функциональная схема интеллектуального магнитного сенсора).
Уже в 20-х годах ХХ века начали использовать магнитодиагностику железных, стальных, чугунных и других изделий из ферромагнитных материалов. Дело в том, что как механические, так и магнитные свойства этих материалов прямо определяются их микрокристаллической структурой. Поэтому, измеряя их магнитные свойства – магнитную проницаемость, коэрцитивную силу, магнитную индукцию насыщения и т.д., – можно контролировать соблюдение технологических режимов их изготовления, микроструктуру и механические свойства.

Функциональная схема интеллектуального сенсора для магнитного контроля качества ферромагнитных материалов:
1 – контролируемая деталь;
2 – магниточувствительный элемент;
3 – магнитопровод;
4 – соленоид;
5 – регулируемый источник тока;
6 – схема усиления и обработки сигналов:
7 – микропроцессор;
8 – блок взаимодействия с пользователем;
9 – интерфейс к внешнему компьютеру или компьютерной сети
В режиме магнитной дефектоскопии, когда надо обнаруживать невидимые дефекты изделий, связанные с нарушениями однородности материала (пустоты, трещины, посторонние включения), контролируемая деталь 1 протягивается рядом с магнитопроводом 3. Дефекты выявляются по изменению магнитного поля в промежутке, где расположен магниточувствительный элемент 2, так как указанные дефекты сопровождаются уменьшением магнитного потока через контролируемую деталь. Магниточувствительным элементом могут быть датчики Холла или магниторезисторы, описанные в предыдущем разделе.
В режиме магнитоструктурного анализа через соленоид 4 пропускают постоянный ток, задаваемый источником 5. Величина тока программно регулируется микропроцессором 7. Индукция магнитного поля, которая измеряется чувствительным элементом 2, зависит от магнитных свойств детали 1. Сигналы от чувствительного элемента 2 усиливаются, обрабатываются электронной схемой 6 и поступают в микропроцессор 7.