

Короткі відомості з теорії і методичні вказівки, необхідні для виконання завдання к-2 Визначення швидкостей і прискорень точок твердого тіла при поступальному і обертальному рухах
Поступальний рух твердого тіла
Поступальним рухомтвердого тіла називається такий рух, при якому будь-яка пряма, що проведена в тілі, залишається за весь час руху тіла паралельною до свого початкового положення.
Властивості поступального руху твердого тіла визначаються наступною теоремою.
Теорема. При поступальному русі твердого тіла всі його точки описують однакові (співпадаючі при накладенні) траєкторії і мають в кожен момент часу однакові за модулем і напрямом швидкості і прискорення.
Встановлені властивості
поступального руху показують, що вивчення
поступального руху твердого тіла
зводиться до вивчення руху однієї його
точки, тобто до кінематики точки. При
поступальному русі загальні для всіх
точок тіла швидкість
![]() і прискорення
і прискорення![]() називають швидкістю і прискоренням
поступального руху твердого тіла.
Поняття про швидкість і прискорення
тіла мають сенс тільки при поступальному
русі твердого тіла. При будь-якому іншому
русі твердого тіла точки тіла рухаються
з різними швидкостями і прискореннями,
і терміни «швидкість тіла» або «прискорення
тіла» для цих рухів не мають сенсу.
називають швидкістю і прискоренням
поступального руху твердого тіла.
Поняття про швидкість і прискорення
тіла мають сенс тільки при поступальному
русі твердого тіла. При будь-якому іншому
русі твердого тіла точки тіла рухаються
з різними швидкостями і прискореннями,
і терміни «швидкість тіла» або «прискорення
тіла» для цих рухів не мають сенсу.
Рівняннями поступального руху твердого тіла є рівняння руху будь-якої точки цього тіла – наприклад, рівняння руху його центра ваги С:
![]() .
.
Обертальний рух твердого тіла навколо нерухомої осі
Обертальним рухомтвердого тіла навколо нерухомої осі називається такий рух тіла, при якому залишаються нерухомими всі його точки, що лежать на деякій прямій, яка називається віссю обертання. При цьому русі всі інші точки тіла рухаються в площинах, перпендикулярних до осі обертання, і описують кола, центри яких лежать на цій осі.
1. При обертальному русі
навколо нерухомої осі положення твердого
тіла в кожен момент часу буде відоме,
якщо задана залежність кута повороту
від часу, тобто рівняння обертального
руху твердого тіла навколо нерухомої
осі має вид: ![]() ..
..
Основними кінематичними
характеристиками обертального руху
твердого тіла є його кутова швидкість
![]() і кутове прискорення
і кутове прискорення![]() .
.
2. Кутова
швидкість характеризує
бистроту зміни з часом кута повороту
тіла. Кутова швидкість тіла в даний
момент часу дорівнює першій похідній
за часом від кута повороту тіла:
![]() .
.
Знак цієї похідної показує
напрям обертання: при
![]() обертання здійснюється проти стрілки
годинника; при
обертання здійснюється проти стрілки
годинника; при![]() – за стрілкою годинника. Одиницею виміру
кутової швидкості в СІ є 1 рад/с. Кутова
швидкість – це вектор, напрямлений по
осі обертання в той бік, з якого бачимо
обертання, яке відбувається проти руху
стрілки годинника. Цей вектор одночасно
визначає і модуль кутової швидкості, і
вісь обертання, і напрям обертання
навколо цієї осі.
– за стрілкою годинника. Одиницею виміру
кутової швидкості в СІ є 1 рад/с. Кутова
швидкість – це вектор, напрямлений по
осі обертання в той бік, з якого бачимо
обертання, яке відбувається проти руху
стрілки годинника. Цей вектор одночасно
визначає і модуль кутової швидкості, і
вісь обертання, і напрям обертання
навколо цієї осі.
3. Кутове прискорення характеризує бистроту зміни з часом кутової швидкості тіла.
Кутове прискорення в даний
момент часу дорівнює першій похідній
за часом від кутової швидкості, або
другій похідній від кута повороту тіла
за часом:
![]() .
.
Одиницею виміру кутового прискорення в СІ є 1 рад/с2.
Якщо
![]() ,
то обертальний рух прискорений, а якщо
,
то обертальний рух прискорений, а якщо![]() ,
то обертальний рух сповільнений.
,
то обертальний рух сповільнений.
Кутове прискорення – це вектор, який збігається з напрямом вектора кутової швидкості, якщо обертальний рух прискорений, і протилежний йому, якщо обертальний рух сповільнений.
4. Якщо
![]() ,
то обертальний рух тіла називається
рівномірним. Рівняння рівномірного
обертання тіла має вид:
,
то обертальний рух тіла називається
рівномірним. Рівняння рівномірного
обертання тіла має вид:![]() .
.
5. Якщо
![]() ,
то обертальний рух тіла називається
рівнозмінним. Кутова швидкість тіла
при рівнозмінному обертанні тіла
визначається за формулою:
,
то обертальний рух тіла називається
рівнозмінним. Кутова швидкість тіла
при рівнозмінному обертанні тіла
визначається за формулою:![]() .
Рівняння рівнозмінного обертання тіла
має вид:
.
Рівняння рівнозмінного обертання тіла
має вид:![]() .
.
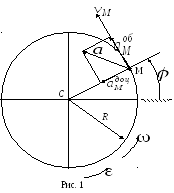
6. При обертанні тіла навколо нерухомої осі будь-яка точка М тіла буде описувати коло радіуса R, площина якого перпендикулярна до осі обертання, а центр С лежить на осі (рис.1).
|
|
Модуль швидкості точки М
твердого тіла дорівнює добутку кутової
швидкості тіла на відстань від точки
до осі обертання:
Прискорення точки М визначають по його складовим: обертальному прискоренню, напрямленому по дотичній до кола, і доцентровому прискоренню, напрямленому до центра С:
Модуль повного прискорення точки М визначають за формулою:
|
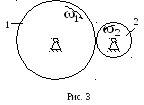
7.Передача обертання від одного твердого тіла, яке обертається навколо нерухомої осі, до другого твердого тіла, яке обертається навколо другої нерухомої осі, здійснюється за допомогою зубчастого чи фрикційного зачеплення двох коліс (рис.2) і (рис.3), або за допомогою пасової передачі (рис.4) і (рис.5) .
|
|
|
|
|
|
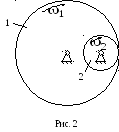
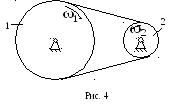
При внутрішньому зачепленні (рис.2) і не перехресній пасовій передачі (рис.4) напрями обертань обох коліс збігаються.
При зовнішньому зачепленні (рис.3) і перехресній пасовій передачі (рис.5) напрями обертань коліс протилежні.
Величини швидкостей на ободі коліс, які находяться в зачепленні, однакові. Однакові за модулем і швидкості на ободі шківів пасової передачі, якщо немає ковзання паса по шківу. В обох випадках кутові швидкості коліс обернено пропорційні їх радіусам:
![]() ..
..
Приклад виконання завдання К-2.
Завдання К-2.
Рух вантажу 1 повинен описуватися
рівнянням
![]() :
:
де t
- час, в секундах;
![]() - сталі величини.
- сталі величини.
В початковий момент часу
(t=0)
координата вантажу повинна бути
![]() ,
а його швидкість –
,
а його швидкість –![]() .
.
Крім того, необхідно, щоб
координата вантажу в момент часу
![]() дорівнювала
дорівнювала![]() .
.
Визначити коефіцієнти
![]() ,
при яких здійснюється необхідний рух
вантажу 1. Визначити також в момент часу
,
при яких здійснюється необхідний рух
вантажу 1. Визначити також в момент часу![]() швидкість і прискорення вантажу і точки
М одного з коліс механізму.
швидкість і прискорення вантажу і точки
М одного з коліс механізму.
Дано: схема механізму (рис.1);
![]() =20
см,
=20
см,
![]() =5
см,
=5
см,![]() =20
см,
=20
см,![]() =10
см,
=10
см,![]() =10см,
=10см,![]() =5
см/с,
=5
см/с,![]() =30
см,
=30
см,![]() =0,5
с,
=0,5
с,![]() =2
с.
=2
с.
|
|
|
|

Розв’язання.
Рівняння руху вантажу 1 має
вид:
![]() . (1)
. (1)
Коефіцієнти
![]() можна визначити з наступних умов:
можна визначити з наступних умов:
при
![]() =0
=0![]() =
10 см,
=
10 см,![]() =5
см/с, (2)
=5
см/с, (2)
при ![]() =2с
=2с![]() =30
см, (3)
=30
см, (3)
Швидкість вантажу 1:
![]()
![]() . (4)
. (4)
Підставляючи (2) і (3) в формули (1) і (4) знаходимо коефіцієнти:
![]() =10
см,
=10
см,
![]() =5
см/с,
=5
см/с,![]() =2,5см/с2.
=2,5см/с2.
Таким чином, рівняння руху вантажу 1 має вид:
![]() (5)
(5)
Швидкість і прискорення вантажу 1 :
![]()
![]() ,
,![]()
![]() см/с2 (6)
см/с2 (6)
При
![]() =0,5с
=0,5с![]()
![]() см/с,
см/с,
![]()
![]() см/с2.
см/с2.
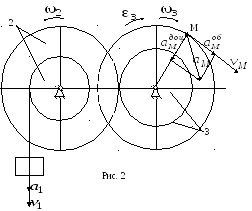
Для визначення швидкості і прискорення точки М запишемо рівняння, які зв’язують швидкість вантажу 1 і кутові швидкості коліс 2 і 3 (рис.2):
 (7)
(7)
Звідки
![]() .
.
Кутове прискорення колеса
3:
![]() рад/с2.
рад/с2.
При
![]() =0,5
с
=0,5
с![]() рад/с,
рад/с,
![]() рад/с2.
рад/с2.
Швидкість точки М:
![]() см/с.
см/с.
Прискорення точки М:
![]() .
.
![]() см/с2,
см/с2,![]() см/с2,
см/с2,
![]() см/с2.
см/с2.
Вектори швидкостей і прискорень вантажу 1 і точки М колеса 3 показані на рис.2.
Відповідь:
![]() =7,5
см/с;
=7,5
см/с;![]() =
60см/с;
=
60см/с;
![]() =
5 см/с2;
=
5 см/с2;
![]() =184,4
см/с2.
=184,4
см/с2.