

Основні властивості малих вільних коливань
1. Вільні коливання механічної системи є гармонічними коливаннями.
2. Частота і період вільних коливань не залежать від початкових умов, а залежать тільки від параметрів системи.
3. Амплітуда – стала величина, залежить від початкових умов
4. Початкова фаза – стала величина, залежить від початкових умов.
Приклад виконання завдання д-23
Завдання Д-23.
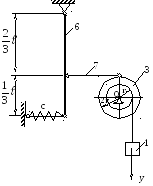
Визначити циклічну частоту і період малих вільних коливань механічної системи з одним ступенем вільності, нехтуючи силами опору і масами ниток.
Знайти рівняння руху вантажу
1
![]() .
За початок відліку на осі прийняти
положення спокою вантажу 1 (при статичній
деформації пружини). Знайти також
амплітуду коливань вантажу 1.
.
За початок відліку на осі прийняти
положення спокою вантажу 1 (при статичній
деформації пружини). Знайти також
амплітуду коливань вантажу 1.
|
рис.1 |
Дано: схема системи (рис.1).
Маси тіл системи:
Масою стержня 7 знехтувати.
Радіус інерції блока 3:
Довжина однорідного стержня 6: ℓ=0,5 м. Коефіцієнт жорсткості пружини: с=5Н/см=500Н/м.
Початкові умови: при
Розв’язання. 1. За умовою задачі механічна система має один ступінь вільності, тобто вантаж 1 рухається тільки по вертикалі уздовж осі y. 2. оскільки за умовою задачі треба знайти рівняння руху вантажу 1 уздовж осі y доцільно за узагальнену координату вибрати координату у. На рисунку 1 положення вантажу 1 визначає координата y=0.
|
|
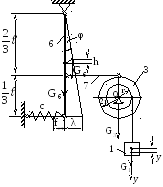
рис.2
|
3. На тіла механічної системи діють сили ваги і сила пружності. Це потенціальні сили. Для виводу диференціального рівняння руху заданої механічної системи скористаємося рівнянням Лагранжа II роду для консервативної системи:
4. Знайдемо кінетичну енергію системи:
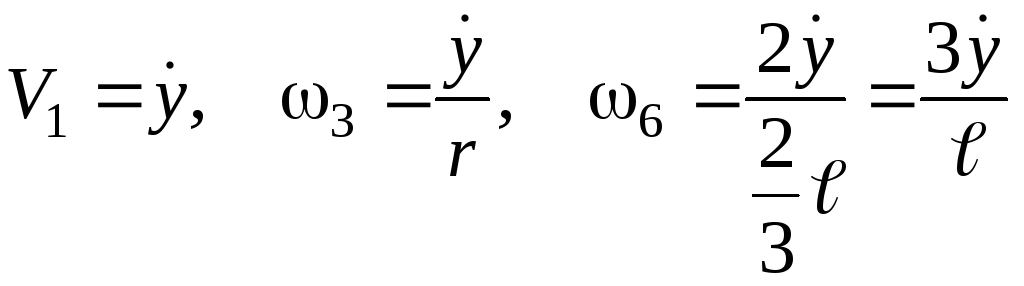
Виразимо кутові швидкості тіл 3 і 6 через узагальнену швидкість тіла 1:
Кінетична енергія тіл1,3 і 6 має вид:
|
 .
.
![]() ;
;
![]() .
.
Підстановка в рівняння (2):
![]() (3)
(3)
5. Знайдемо потенціальну енергію системи, яка визначається роботою сил ваги системи і сили пружності пружини на переміщенні системи з відхиленого положення, коли вантаж 1 має координату y, в нульове положення, яким вважаємо положення спокою системи (рис.2):
![]() .
.
Потенціальна енергія, що відповідає силам ваги при заданому переміщенні:
![]()
де h – вертикальне переміщення центра ваги стержня 6, яке обчислюємо з точністю до величин другого порядку малості відносно узагальненої координати y.
З рис.2:
![]()
Розкладемо cosφ
в ряд Маклорена:
![]() .
.
Обмежимося в формулі розкладання двома першими членами.:
![]() ,
,![]() .
.
Враховуючи, що
![]() ,
знайдемо:
,
знайдемо:
![]() .
.
Таким чином:
![]()
Потенціальна енергія деформованої пружини при заданому переміщенні системи дорівнює:
![]()
де
![]() – статична деформація пружини;
– статична деформація пружини;
λ – переміщення точки кріплення пружини при переміщенні вантажу 1 на відстань y,
![]() ,
,
![]()
Знайдемо потенціальну енергію системи:
![]()
Оскільки, в положенні спокою, що відповідає статичній деформації пружини
![]() то
то
![]()
Таким чином, потенціальна механічної системи дорівнює:
![]() (4)
(4)
Знайдемо значення членів рівняння (1):
![]()
Рівняння (1) приймає вид:
![]()
або
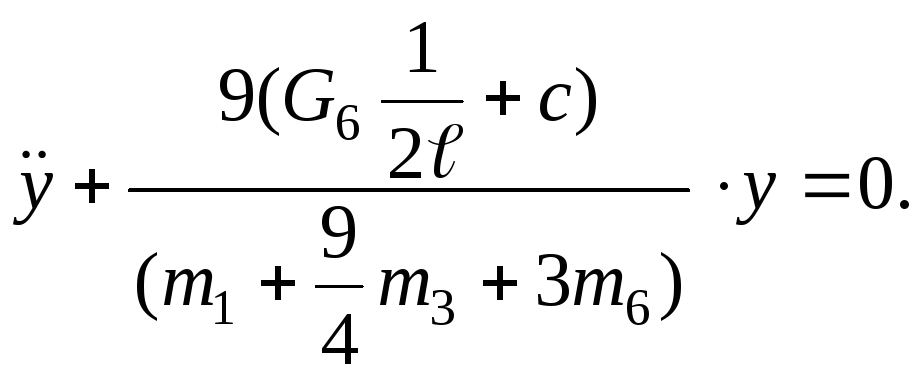
Коефіцієнт при y
позначимо
![]() і отримаємо диференціальне рівняння
малих вільних коливань заданої механічної
системи:
і отримаємо диференціальне рівняння
малих вільних коливань заданої механічної
системи:
![]() (5)
(5)
Знайдемо циклічну частоту вільних коливань:
Період вільних коливань:
![]()
Інтегруючи рівняння (5), отримаємо рівняння руху вантажу 1:
![]() . (6)
. (6)
Для визначення сталих
інтегрування
![]() і
і![]() знайдемо швидкість вантажу і скористаємося
початковими умовами задачі:
знайдемо швидкість вантажу і скористаємося
початковими умовами задачі:
![]()
Початкові умови:
 .
.
Визначимо сталі інтегрування:
![]() .
.
![]()
Підставивши числові значення сталих інтегрування і циклічної частоти в рівняння (6), отримаємо рівняння руху вантажу 1:
![]() (7)
(7)
Рівняння руху (6) можна представити в іншій, так званій амплітудній, формі. Введемо позначення:
![]() тоді
тоді
![]()
З урахуванням прийнятих позначень рівняння руху (6) має вид:
![]()
Після підстановки числових значень, рівняння руху вантажу 1 приймає вид:
![]() .
.
Амплітуда коливань a=0,37 см.
Відповідь:
![]()